完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 航位推算
航位推算法是在知道当前时刻位置的条件下,通过测量移动的距离和方位,推算下一时刻位置的方法。航位推算算法最初用于车辆、船舶等的航行定位中,所使用的加速度计、磁罗盘、陀螺仪成本高,尺寸大。随着微机电系统技术的发展,加速度计、数字罗盘、陀螺仪尺寸、重量、成本都大大降低,使航位推算可以在行人导航中得以应用。
航位推算法是在知道当前时刻位置的条件下,通过测量移动的距离和方位,推算下一时刻位置的方法。航位推算算法最初用于车辆、船舶等的航行定位中,所使用的加速度计、磁罗盘、陀螺仪成本高,尺寸大。随着微机电系统技术的发展,加速度计、数字罗盘、陀螺仪尺寸、重量、成本都大大降低,使航位推算可以在行人导航中得以应用。
即使在仅GPS / GNSS定位困难或不可能的情况下,通过使用来自各种传感器(陀螺仪传感器,加速度计,速度脉冲等)的信息来计算当前位置,它可以保持高精度定位。航位推算解决方案广泛应用于汽车导航系统。
船舶在海上航行时确定船位的方法一般可以分为两大类,即推算和定位。所谓推算或航迹推算,是海上求取船位的最基本的方法。它是从已知的推算起始点开始,根据船舶最基本的导航仪器(罗经和计程仪)所指示的航向与航程,以及当时的风、流要素和船舶操纵要素,在不借助于外界导航物标的条件下,推算出具有一定精度的航迹和船位来。而定位是利用各种航海导航仪器,观测外界已确知其位置的物标,如山头、岛屿、灯塔、无线电导航站、天体和人造卫星等,然后根据观测结果定出当时的船位。航海上常用的定位方法,根据所采用物标的性质和观测手段的不同可分为:陆标定位、天文定位、无线电定位、电航仪器定位和卫星定位等几类。
航位推算是一个很常见的定位方法。在知道当前时刻的位置,然后通过imu等传感器去估计下一个时刻的位置。在自动驾驶车辆定位的时候,GPS提供10Hz的定位信息。这每个GPS信息来临的0.1s的间隔里面,车辆位置也会移动很多。那么这个时候就需要航位推算来判断车辆到底移动了多少距离,在哪个地方。所以,航位推算是自动驾驶车辆最基本的,也是必须的一种算法之一。比如推算车辆在隧道中的位置。

IMU提供相对定位信息,并不能提供所在具体位置信息,因此,高精度的IMU与GNSS导航系统二者组合使用,可以获取绝对位置的信息,避免车辆在信号失效的情况...

MAX11253EVKIT# 评估板 - 模数转换器(ADC)
电子发烧友网为你提供Maxim(Maxim)MAX11253EVKIT#相关产品参数、数据手册,更有MAX11253EVKIT#的引脚图、接线图、封装手...
2023-02-05 标签:Maxim IntegratedMAX11253EVKIT# 36 0
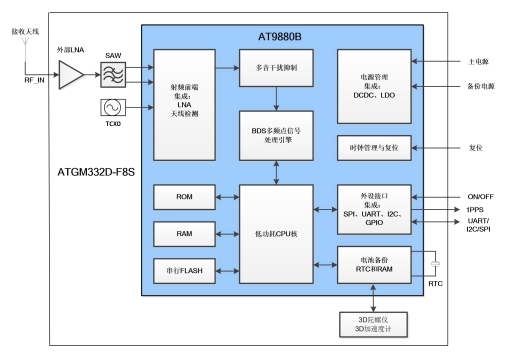
ATGM332D-F8S:低功耗、高集成度单北斗多频车载航位推算模块
ATGM332D-F8S主要特征: 1、多频点单北斗接收机 支持B1C独立定位 通道数目:176通道 支持北斗二号、北斗三号 支持B1I、B1C、B2I...
电子发烧友网报道(文/李宁远)汽车在使用GPS或者GNSS定位时,需要同时接收到多个卫星信号才能保证精确定位。因此我们可以看到当汽车行驶到隧道等存在遮蔽...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

