完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 钳位
钳位是指将某点的电位限制在规定电位的措施,是一种过压保护技术。产生这个措施的那些电路叫做钳位电路。钳位电路的作用是将周期性变化的波形的顶部或底部保持在某一确定的直流电平上。
钳位是指将某点的电位限制在规定电位的措施,是一种过压保护技术。产生这个措施的那些电路叫做钳位电路(clamping circuit)。钳位电路的作用是将周期性变化的波形的顶部或底部保持在某一确定的直流电平上。从而提高整个电路的工作稳定性。在钳位电路中存在钳位二极管(clamping diode),钳位二极管,产生钳位电压(Clamping voltage)
钳位是指将某点的电位限制在规定电位的措施,是一种过压保护技术。产生这个措施的那些电路叫做钳位电路(clamping circuit)。钳位电路的作用是将周期性变化的波形的顶部或底部保持在某一确定的直流电平上。从而提高整个电路的工作稳定性。在钳位电路中存在钳位二极管(clamping diode),钳位二极管,产生钳位电压(Clamping voltage)
过压保护:
高精度运算放大器可让系统设计人员能在调理信号(放大、滤波和缓冲)的同时保持原始信号的精度。当信息包含在变动极小的信号中时,信号路径上的运算放大器在工作时具有极低的直流和交流误差性能就显得极为必要。总系统精度取决于信号路径的精度保持程度。在某些应用中,可能出现电源电压以外的电压驱动运算放大器输入的情况——这种情况称为过压情况。长时间(甚至短时间内)的过量输入电流——如果电流足够高——便可能会损坏运算放大器。面对这种可能性,系统设计人员通常会在放大器输入端添加一个过压保护(OVP)电路。因此,难就难在引入OVP电路的同时不增加误差(损失系统精度)。[1]
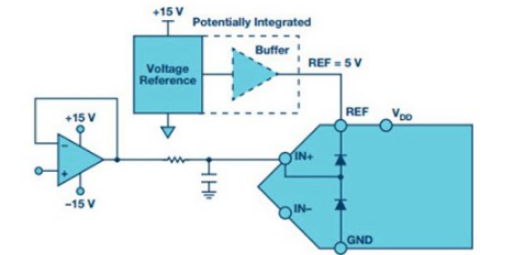
钳位:一种经典的过压保护技术
图1所示是一种OVP(过压保护)的常用方法。当输入信号(VIN)幅度超过电源电压之一加上二极管正向电压,则二极管(DOVPP或DVPN)将会正向偏置,电流将流至供电轨,过量电流可能会损坏运算放大器。本应用中,我们使用了ADA4077——一款精度极高的运算放大器,最大电源范围为30V(或±15V)。钳位二极管是1N5177肖特基二极管,因为它们的正向导通电压等于大约0.4V,这比运算放大器输入静电放电(ESD)保护二极管的正向导通电压低;因此,钳位二极管将在ESD二极管之前开始传导电流。过压保护电阻ROVP限制了流过钳位二极管的正向电流,使其保持在最大电流额定值以下,防止受到过量电流的损害。使用反馈环路电阻RFB是因为,同相输入上的任何输入偏置电流都会流过ROVP而产生输入电压误差——增加RFB值可消除误差,因为它会在反相输入端产生一个相似的电压。[1]
相关术语
钳位电压钳位电压是指限制电压。这个限制的对象,可以是需要过压保护的对象,譬如开关电源中的MOS管,需要一个钳位网络来限制D、S极间电压,保护MOS不被损坏。
钳位电路钳位电路(clampingcircuit)是将脉冲信号的某一部分固定在指定电压值上,并保持原波形形状不变的电路。钳位电路经常用于各种显示设备中。在示波器和雷达显示器中用钳位电路使扫描信号的直流分量得到恢复,以解决扫描速度改变时所引起的屏幕上图像位置移动问题。在电视系统中用钳位电路使全电视信号的同步脉冲顶端保持在固定的电压上,以克服由于失去直流分量或干扰等原因造成的电平波动,从而实现电视同步信号的分离。
二极管的钳位作用
在分析钳位二极管时,必须先把一端是恒压的,即假设该端的电压不变,作参考电位。该参考电位视具体功能而定,可以是任意伏特。5V、0V、10V等。另一端的电压是被钳端,即电压是会改变的,是你需要去钳(就是说要去限制)的电压。被钳端电压会被强制拉向参考端电压。到底二极管的N极还是P极接参考端呢?这个不好说的,要按具体功能而定。反正就是按照二极管的导通原理来分析就行了。譬如P端接5V参考端,那被钳端电压就被钳在了5V或以上;如果N端接5V参考端,那被钳端电压就被钳在了5V或以下;再比如我用两个二极管,一个P接5V参考端,一个N接5V参考端,各自的另一端接被钳端,那被钳端电压就被钳在了5V整了!以上分析均忽略二极管导通电压。
怎样理解二极管的钳位电路和稳压电路
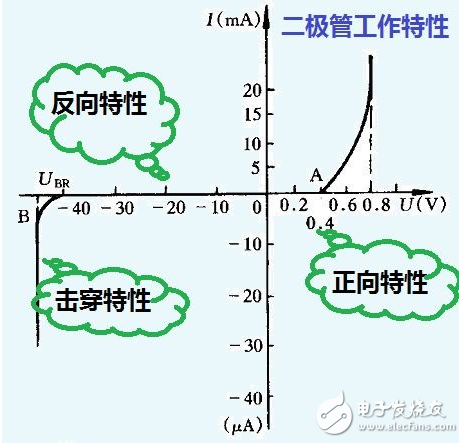
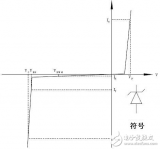
要弄懂这个问题,必须理解二极管的伏安特性曲线。
先看第一象限的正向特性:
我们发现,当正向电压从零开始上升,在0.4V之前,二极管的正向电流很小。但从0.7V开始,电流迅速增加。
再看第二象限的反向特性:
我们发现,我们发现,反向电压一直到达-40V时,反向电流也即反向漏电流近乎为零。
这说明,二极管的正向电压大于0.7V后,其等效电阻很小,这叫做二极管的正向特性;二极管的反向特性是反向电阻很大。
我们来看下图:
我们先来看图1:
图1中,二极管处于正向接法,它的管压降是0.7V。因此,电阻R上的电压为:
那么流过电阻R的电流呢?
现在我们再来看图2:
我们看到,两只二极管的正极都接到12V,因此两只二极管都属于正向接法。于是,D1二极管的正极应当是6+0.7V=6.7V,D2二极管的正极应当是2+0.7=2.7V。那么电路的输出端电压Usr到底是多少呢?
假设Usc=6.7V,于是二极管D2将处于正向接法。又因为二极管D2的压降是0.7V,因此二极管D2的正极将会被强制性地拉到2.7V。如此一来,二极管D1将处于反偏状态,即D1的负极电压比正极电压高。
注意:D2导通后,D1的正极变成2.7V,同时D1的负极是6V,因此D1被反向偏置而截止。
也就是说,输出电压Usc被强制性地钳位在2.7V。哪个电压低,电路的输出电压就是低电压再加上0.7V。
我们来看一个实例:
此图是一套用于控制晶闸管触发的电路。按图示我们能看到用正与门构成的钳位电路。三个输入端分别是测控端电压、PID控制和触发脉冲电路。
测控端电压电路正常输出是脉动直流,高电平的占空比较大;PID控制输出也是高的电平,而触发脉冲则输出正负交替的高电平脉冲。可见,在正常情况下,与门的输出由触发脉冲来决定,毕竟零电平也是脉冲的一部分。
可见,钳位电路的应用还是很广泛的。
再谈谈稳压二极管。
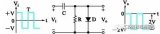
我们看上图的测控端电压电路:
设变压器的初级电压为380Vac,次级为24Vac,于是经过桥式整流后,其平均电压为0.9X24=21.6V,属于脉动直流。但实际计算时不能这样算,必须用最大值来计算。
我们知道稳压二极管工作在反向击穿区,见第一幅图的第三象限。它的曲线特点是:电流变化很大,但电压变化很小,这就是它的稳压原理。不过要注意:此时二极管处于反向接法,即稳压二极管工作在反向电压下。
设,上图中的稳压二极管稳定电压是12V,最大稳定电流是25毫安。我们先把电阻R2开路,来计算R1的值。
故R1取值为820欧,功率为0.51W,取标称值1W。
此时稳压二极管两端的波形是什么样的?就是波形图中下部的绿色部分。在这里,稳压二极管起到给半波直流波形削头的作用。
现在,我们把R2接入,于是流过稳压二极管的电流变小了。但只要流过稳压二极管的电流仍然在它的稳定电流范围之内,则稳压二极管的稳压作用就能维持。
设稳压二极管的最小稳定电流为5毫安,则流过R2和R3的电流为25-5=20毫安。故R2+R3的取值为:
实际上,我们看到R2+R3的和只要不低于600欧即可,故R2+R3的实际值会大于计算值。具体取值与我们的解答无关,此处忽略。
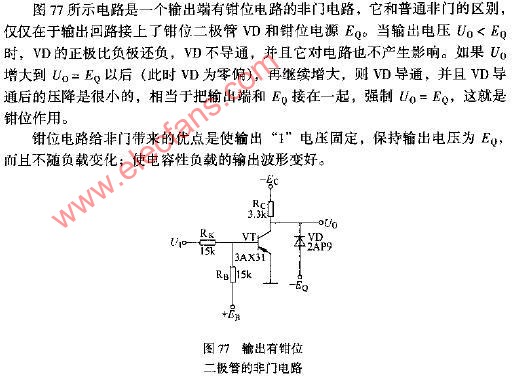
我们看到,晶体管T1的集电极也有一只稳压二极管D2,它的用途同样也是削幅,使得输出到后级的脉冲幅度最高值就等于稳压二极管的稳定电压。
================
至此,二极管的钳位电路和稳压二极管的用途都讲完了。

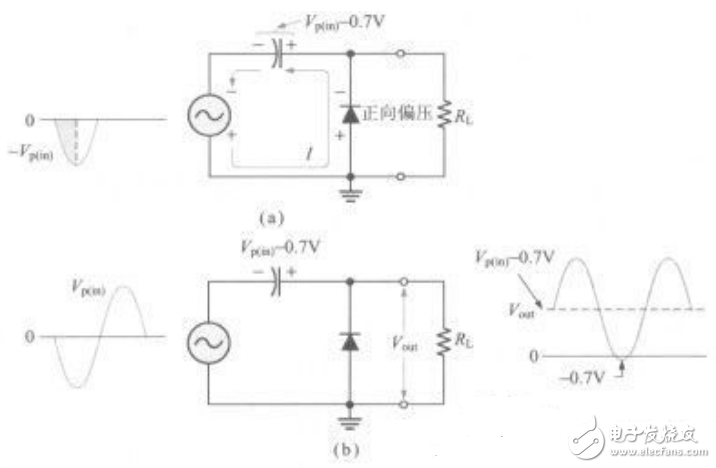
钳位器电路通常应用于电视机,作为直流电压重置器。接收到的合成视频信号,通常是通过电容器耦合到放大器,因此会将信号中的直流部分滤除掉,造成黑白参考幅值和遮...
最简单钳位电路分析(多款二极管正钳位器电路与二极管负钳位器电路对比)
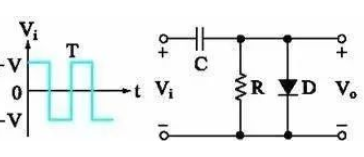
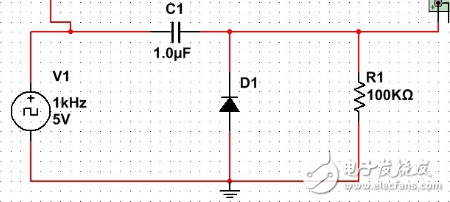
一个由二极管,电阻,电容组成的电路,能使输入波形发生某个值的偏移,但其形状不发生变化,就是钳位电路,比如该典型钳位电路参数:输入信号5V ,1KHZ的方...
本文主要介绍了教你如何快速理解二极管中的钳位电路及稳压电路。对于钳位电路二极管跟稳压电路二极管很多人看了资料却依旧无法理解。其实,要理解稳压及钳位电路二...
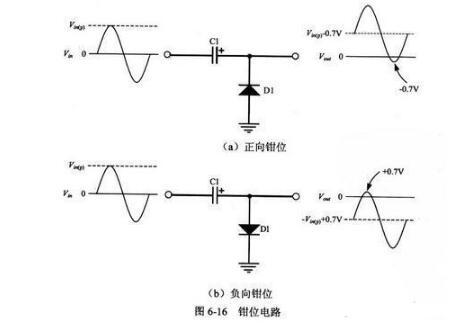
(1)功能:将输入讯号的位准予以上移或下移,并不改变输入讯号的波形。(2)基本元件:二极管D、电容器C及电阻器R(直流电池VR)。(3)类别:负钳位器与...
瞬态电压抑制二极管(TVS)又叫钳位二极管,是目前国际上普遍使用的一种高效能电路保护器件,它的外型与普通二极管相同,但却能吸收高达数千瓦的浪涌功率,...
所谓钳位,就是把输入电压变成峰值钳制在某一预定的电平上的输出电压,而不改变信号。钳位电路(1)功能:将输入讯
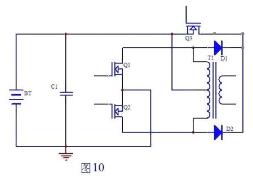
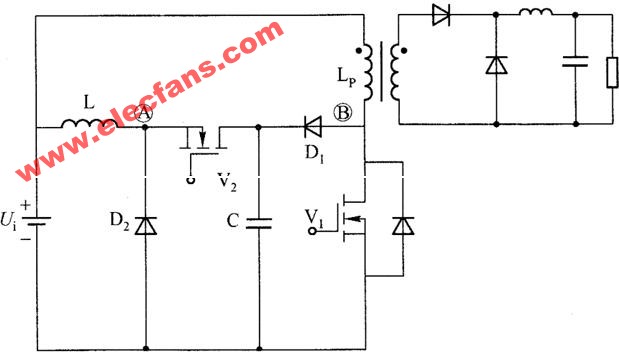
逆变电路中变压器的尖峰有源钳位是什么意思?变压器的绝缘等级如何划分?
上面我们已经分析了Q1,Q2两管漏极产生尖峰的原因,下面我们就来想办法消除这个尖峰了。我想到的办法就是Q1,Q2的漏极到电池的正极加一个开关,当然这个开...
Q A 用钳式探针测量交流电流 交流钳能以非侵入的方式测量流过导线的电流。我们经常会收到客户的询问,在2相或3相交流应用中,应从哪根电线测试电流。使用2...

如今的普通工作人员常常身兼装配工和安装工两种工作,这就意味着您的设计(无论好坏)需要简单易用,并需要良好的保护。平心而论,所有技术就摆在那里,而我们大多...

MAX5974_为宽输入电压范围、有源钳位、电流模式PWM控制器,为以太网供电(PoE)中的用电设备(PD)提供正激变换。MAX5974A/MAX597...
有源钳位转换技术 钳位技术的分类: 有源钳位(Active CLAMP)技术:有源钳位技术要比无源技术好,所以本章只介绍有源钳位技术
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1