 电子发烧友App
电子发烧友App


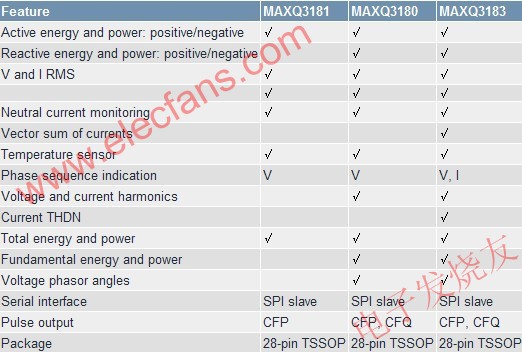
摘要:MAXQ3180微控制器是电表多相模拟前端。它具备现代多功能电表的所有功能。MAXQ3180通过串行外设互联(SPI™)总线将其读数传送给主机微控制器。本应用笔记介绍怎样实现这一接口,演示实例代码以帮助设计人员实现这一通信机制。

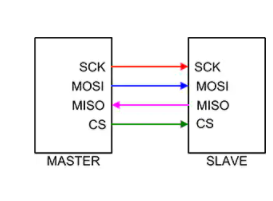
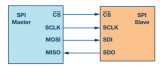
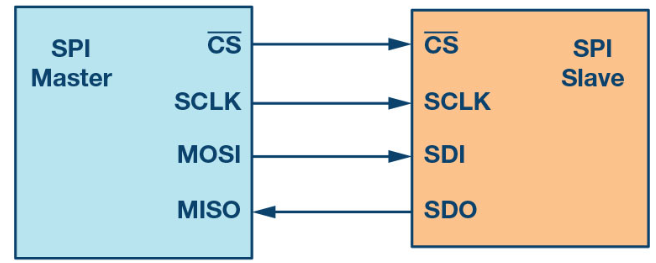
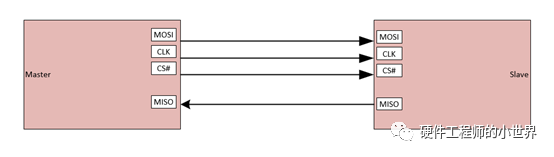
图1. SPI从机示意图
SPI通信采用了四种不同的电路:
有些SPI外设牺牲速率以模拟半双工工作。MAXQ3180微控制器没有采用这一方式,它是真正的全双工SPI从机。
本应用笔记的其他部分介绍怎样连接并成功使用SPI总线上的MAXQ3180。
有些MAXQ3180 “存储”位置触发器件内部操作,“随时”计算电表测量结果。向这些位置写入的是“nop”。对RAM和虚拟ROM位置特殊功能和目的的讨论已经超出了本文档的范围。此处最重要的是微控制器的确只有两种SPI通信操作:读和写。
MAXQ3180中的每一次操作以主机发送两个字节开始,它含有命令(例如,读或者写)、要访问的地址、访问的字节数。如前所述,每个SPI外设对接收到的每个字节返回一个字节。因此,MAXQ3180在接收到第一个命令字节后返回0xC1,第二个命令字节后返回0xC2。该协议显示在下面的图2中。

图2. 主机向MAXQ3180读写数据
如果主机读取一个或者多个字节,它必须发送空字节。记住,主机不能接收来自从机的任何信息,除非它发送某些信息:发送一个字节以得到一个字节。但是接收一条命令后,MAXQ3180要计算结果,当主机发送空字节时,它可能还没有准备好。出于这一原因,MAXQ3180 总是在发送数据之前发送零或者NAK字符等多个字节(0x4E或者ASCII 'N'),随后是一个ACK字符(0x41,或者ASCII 'A')。
如果主机写入一个或者多个字节,发送命令后,它立即发送要写入的数据。MAXQ3180为每一个数据字节返回ACK (0x41)。然后,它返回NAK (0x4E),直到写周期完成,随后返回最终ACK。
注意,最终ACK之后,MAXQ3180立即准备开始下一操作;它不需要进行任何其他等待。它甚至不需要触发SSEL以开始下一操作。MAXQ3180知道第一次操作已经完成,准备进行下一操作。
不论什么原因,如果需要复位主机和MAXQ3180之间的通信(例如,如果通信是异步的),从第一个命令字节重新启动通信之前,主机只需要等待200ms。200ms延时指示MAXQ3180,主机放弃了前面的操作。

图3. 命令字节结构
第一个命令字节(图3)告诉MAXQ3180,所申请的操作是READ还是WRITE,以及操作的长度。命令字节结构如下:
命令字节1的其他部分和所有的命令字节2提供要访问的RAM字节的地址(或者一样的虚拟ROM功能)。

图4. 读取MAXQ3180的流程图

图5. 写入MAXQ3180的流程图
在下面的清单中,dly_us子程序使程序线程停止执行几个微秒。定义SPI_TIMEOUT常数以提供比字符超时时间更长的参数。
在高层子程序中,采用ENUM按名称来选择寄存器。在其他参数中,它提供register_lookup_table阵列的索引,含有每个MAXQ3180寄存器的寄存器长度。请参考图6、图7和图8。
图6. Send_SPI原代码
图7. ReadAFE (SPI_Read)子程序代码
图8. Write_AFE (SPI_Write)子程序代码
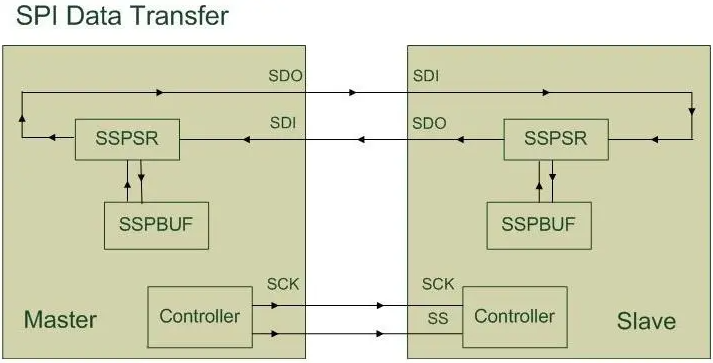
SPI简介
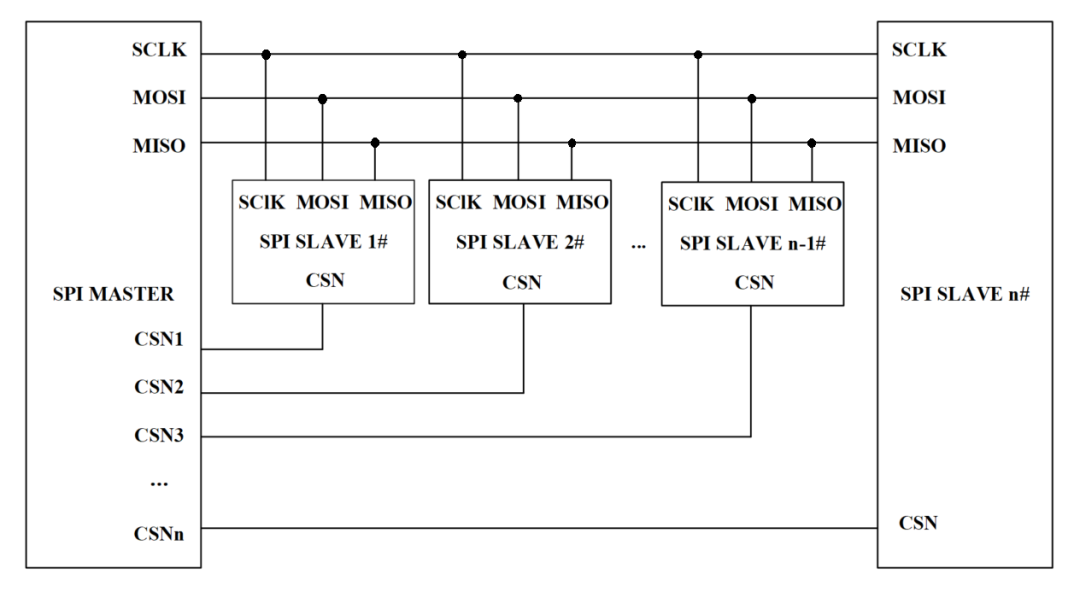
串行外设接口(SPI)是器件间总线协议,实现芯片间的快速、同步、全双工通信。由一个主机驱动同步时钟,选择对哪些从机寻址。每个SPI外设含有一个移位寄存器和控制电路,使被寻址的串行外设互联SPI外设能够同时发送和接收数据。图1. SPI从机示意图
SPI通信采用了四种不同的电路:
- SCLK:所有器件使用的同步时钟。主机驱动该时钟,从机接收时钟。注意,SCLK可以被选通,不需要在SPI操作之间进行驱动。
- MOSI:主机出,从机入。这是主机在SPI总线上驱动所有从机的主要数据线。只有所选的从机同步来自MOSI的数据。
- MISO:主机入,从机出。这是所选从机向主机发送时驱动的主要数据线。只有所选的从机可以驱动该电路。实际上,这是SPI总线安排中允许从机驱动的唯一电路。
- SSEL:该信号在每一从机上都不同。当有效(通常为低电平)时,所选从机必须驱动MISO。
有些SPI外设牺牲速率以模拟半双工工作。MAXQ3180微控制器没有采用这一方式,它是真正的全双工SPI从机。
本应用笔记的其他部分介绍怎样连接并成功使用SPI总线上的MAXQ3180。
MAXQ3180通信简介
对于主机,MAXQ3180看起来象一个存储器阵列,同时含有RAM和ROM。这是因为MAXQ3180中的ROM固件读取RAM的工作参数,将结果放到RAM中。因此,配置MAXQ3180和对RAM进行块写入一样简单。有些MAXQ3180 “存储”位置触发器件内部操作,“随时”计算电表测量结果。向这些位置写入的是“nop”。对RAM和虚拟ROM位置特殊功能和目的的讨论已经超出了本文档的范围。此处最重要的是微控制器的确只有两种SPI通信操作:读和写。
MAXQ3180中的每一次操作以主机发送两个字节开始,它含有命令(例如,读或者写)、要访问的地址、访问的字节数。如前所述,每个SPI外设对接收到的每个字节返回一个字节。因此,MAXQ3180在接收到第一个命令字节后返回0xC1,第二个命令字节后返回0xC2。该协议显示在下面的图2中。
图2. 主机向MAXQ3180读写数据
如果主机读取一个或者多个字节,它必须发送空字节。记住,主机不能接收来自从机的任何信息,除非它发送某些信息:发送一个字节以得到一个字节。但是接收一条命令后,MAXQ3180要计算结果,当主机发送空字节时,它可能还没有准备好。出于这一原因,MAXQ3180 总是在发送数据之前发送零或者NAK字符等多个字节(0x4E或者ASCII 'N'),随后是一个ACK字符(0x41,或者ASCII 'A')。
如果主机写入一个或者多个字节,发送命令后,它立即发送要写入的数据。MAXQ3180为每一个数据字节返回ACK (0x41)。然后,它返回NAK (0x4E),直到写周期完成,随后返回最终ACK。
注意,最终ACK之后,MAXQ3180立即准备开始下一操作;它不需要进行任何其他等待。它甚至不需要触发SSEL以开始下一操作。MAXQ3180知道第一次操作已经完成,准备进行下一操作。
不论什么原因,如果需要复位主机和MAXQ3180之间的通信(例如,如果通信是异步的),从第一个命令字节重新启动通信之前,主机只需要等待200ms。200ms延时指示MAXQ3180,主机放弃了前面的操作。
命令字节
命令字节告诉MAXQ3180:图3. 命令字节结构
第一个命令字节(图3)告诉MAXQ3180,所申请的操作是READ还是WRITE,以及操作的长度。命令字节结构如下:
| Length Code | Data Length |
| 0b00 | 1 byte |
| 0b01 | 2 bytes |
| 0b10 | 4 bytes |
| 0b11 | 8 bytes |
命令字节1的其他部分和所有的命令字节2提供要访问的RAM字节的地址(或者一样的虚拟ROM功能)。
主机软件设计
虽然MAXQ3180含有一个硬件SPI控制器,ROM固件中的软件程序还是要处理每一消息字节。出于这一原因,连续字节之间需要有延时。在当前的MAXQ3180型号中,这一延时不得小于100µs才能实现可靠的工作。请参考图4和图5。图4. 读取MAXQ3180的流程图
图5. 写入MAXQ3180的流程图
代码清单
提供代码以实现具有内置SPI主机的MAXQ2000微控制器和MAXQ3180的接口。其他微控制器用户需要提供自己的SPI原语,还可能要修改高层子程序。在下面的清单中,dly_us子程序使程序线程停止执行几个微秒。定义SPI_TIMEOUT常数以提供比字符超时时间更长的参数。
在高层子程序中,采用ENUM按名称来选择寄存器。在其他参数中,它提供register_lookup_table阵列的索引,含有每个MAXQ3180寄存器的寄存器长度。请参考图6、图7和图8。
unsigned char Send_SPI(unsigned char x)
{
unsigned char y = 0;
int z;
int error = 0;
SPICN = 3; /* MSTSM, SPIEN */
z = 0; while ((SPICN_bit.STBY) && (++z < SPI_TIMEOUT));
if (z == SPI_TIMEOUT) error = 1;
SPICN_bit.SPIC = 0; /* Clear transfer complete flag */
SPIB = x;
z = 0; while ((!SPICN_bit.SPIC) && (++z < SPI_TIMEOUT));
if (z == SPI_TIMEOUT) error = 1;
y = SPIB;
SPICN_bit.SPIC = 0;
dly_us(100);
if (error) return 0;
return y;
}
|
long Read_AFE(enum METER_REGISTER_RECORD reg, uint16 reg_addr) { extern unsigned char record[8]; unsigned long x = 0; unsigned char i, regadd, command_code = 0; for(i=0; i<8; i++) record[i] = 0; switch(register_lookup_table[reg].register_length) { case 2: command_code |= 0x10; break; case 4: command_code |= 0x20; break; case 8: command_code |= 0x30; break; } command_code |= reg_addr >> 8; regadd = reg_addr & 0xff; /* Disable SPI to reset it */ SPICN_bit.SPIEN = 0; for(x=0; x<300; x++); SPICN_bit.SPIEN = 1; SPI_SELECT_0; i = 0; while((Send_SPI(command_code)!= 0xC1)&&(++i < SPI_COMMAND_RETRIES)) spi_comm_timeout(); x = 0xffffffff; if (i == SPI_COMMAND_RETRIES) goto spierror; Send_SPI(regadd); i = 0; while((Send_SPI(0) != 'A') && (++i < SPI_RETRIES)); if (i == SPI_RETRIES) goto spierror; x = 0; for(i=0; i |
void Write_AFE(enum METER_REGISTER_RECORD reg, uint16 reg_addr, uint32 data)
{
uint8 i, regadd, command_code = 0x80;
int x;
switch(register_lookup_table[reg].register_length)
{
case 2: command_code |= 0x10; break;
case 4: command_code |= 0x20; break;
case 8: command_code |= 0x30; break;
}
command_code |= reg_addr >> 8;
regadd = reg_addr & 0xff;
/* Disable SPI hardware to reset it */
SPICN_bit.SPIEN = 0;
for(x=0; x<300; x++);
SPICN_bit.SPIEN = 1;
SPI_SELECT_0;
i = 0;
while((Send_SPI(command_code)!=0xC1)&&(++i < SPI_COMMAND_RETRIES))
spi_comm_timeout();
if (i == SPI_COMMAND_RETRIES) goto spierror;
Send_SPI(regadd);
for(i=0; i |
















 工商网监
工商网监
评论