 电子发烧友App
电子发烧友App


关键词:动目标显示,改善因子,自适应对消
1 引 言
近年来,增强对动目标的捕获、跟踪、显示和检测已成为发展新的光电综合测量系统的关键技术之一。随着电子器件性能的提高和数字信号处理技术的进步,动目标处理技术获得了长足的发展。动目标显示技术发展的主要目的是为了增强雷达的目标检测能力并显示出运动目标。它能够检测到那些存在于各种杂波中具有不同径向运动速度的目标反射信号。其中雷达的杂波是指从地面、海面、空中云雨、箔条、鸟类、昆虫及极光等物体反射得到的回波,表述为地杂波、海杂波、气象杂波、“仙波”等等。上述列举出的雷达杂波信号与雷达接收机的噪声信号有本质上的区别,在连续的两个发射脉冲之间杂波信号是相关的,而噪声是不相关的。动目标显示技术就是利用了杂波的特性滤除雷达回波中的杂波信号,从而显示出雷达作用范围内的运动目标,使光电综合测量技术向自动化、智能化、高精度、全天候、实时处理的方向发展。
2 动目标处理系统的改善因子I与整机相关系统的关系
动目标处理系统的工作质量可以用改善因子I来衡量。改善因子的提高受限于雷达相关部分的性能。如杂波内部的起伏运动,雷达各系统部件的不稳定性,A/D变换器的量化噪声,正交双通道幅相不一致等。改善因子I总可用下式表示:![]()
从(1)式可以看出I总的值决定于各种改善因子中最小的那一个。
2.1 量化噪声对改善因子的约束
若A/D变换器位数为b,最高位为符号位,则A/D量化噪声对改善因子的限制为:

2.2 正交双通道幅相不一致性对改善因子的约束
采用正交双通道处理技术,必须考虑I、Q通道的幅相不一致性对系统性能的影响。正交信号UI(t)、UQ(t)的幅度不一致性Δ和相位正交差Q引起的镜象频谱分量与理想频谱分量的功率比为:
从表2中可以看出,若希望动目标处理系统的改善因子大于40dB,I、Q通道的幅度不一致性必须小于1%,相位正交差必须小于1度。

雷达不稳定性对改善因子的限制,主要表现在相位、振幅及脉冲延时不稳定上。在采用磁控管发射机雷达中,动目标处理系统的改善因子I不稳在23dB左右,在某型雷达中采用固态微波源,它比磁控管发射机的频率、相位稳定性高2个数量级以上,1kHz频偏处相噪低于-100~110dBC/Hz,底部相噪在-120 dBC/Hz以下,I不稳定在50~60dB之间。
2.4 杂波内部运动对系统改善因子的约束
2.4.1 杂波的频谱特性
众所周知,由于杂波内部的无规则运动,各反射单元所反射的回波具有不同的多谱勒频率,这导致了杂波频谱的展宽。杂波谱通常具有高斯特性,其功率谱通常近似为:

式中,W(f):杂波的功率谱,W0=W(f)|f=0;
f:工作频率;λ:雷达工作波长;
δc:杂波功率谱标准差,反映了不同工作波长下杂波谱展宽的程度;
δv:杂波运动的标准差,与杂波内部起伏运动的程度有关,与工作波长无关;有δc=2δv/λ。
2.4.2 杂波抑制滤波器分析
(1)固定对消器
为实现对地物杂波的良好抑制,可以采用凹口固定在零频的对消器。
一次对消器的传递函数为:
H1(Z)=(1-Z-1)(5)
二次对消器的传递函数为:
H2(Z)=(1-Z-1)2(6)


对零均值的离散型杂波,其δC对固定一次对消器和固定二次对消器改善因子的限制:当系统的Fr为1000Hz,δC=13Hz,则有
当工作的Fr较高时,改善因子还会有所提高。上述的一次固定对消器和二次固定对消器,对海浪和气象杂波有很大限制。

可以看出利用固定对消器不能对海杂波及云雨杂波进行很好的抑制。因此我们采用自适应对消器对海杂波及云雨杂波进行抑制。
(2)自适应对消器
为了抑制云、雨、雪等具有可变运动速度的杂波,杂波对消器的凹口必须实时锁定在杂波平均多谱勒的中心。设杂波平均多谱勒频率为fdc,杂波运动的径向速度为VC,雷达工作波长λ(5cm),则它们三者的关系为:fdc=2VC/λ,如果杂波运动的径向速度变化范围为:VC=0~60km/h=0~16.67m/s,杂波平均多谱勒频率fdc=0~±666.67Hz。由于雷达的重复频率:fr=1000Hz,则自适应对消器凹口可变范围为0~1000Hz。
自适应一次对消器的传递函数为:
![]()

若输入信号为:

W1=cos(θ1)+jsin(θ1)称为滤波器的权值。自适应一次对消滤波器通过调整它的权值实现最佳滤波。
自适应二次对消器的传递函数为:
![]()


W2=cos(θ2)+jsin(θ2)
自适应对消器的关键问题是如何实时获得与杂波平均多谱勒频率中心fdc相对应的滤波器的权值,以便将滤波器的凹口锁定到平均多谱勒频率中心fdc,并且随着杂波平均多谱勒频率中心fdc的变化,实时获取新的相对应的滤波器的权值WI和WQ,使滤波器的凹口始终跟随fdc的变化而锁定到它的中心,以达到最佳的杂波抑制效果,与此相应的使杂波剩余最小的权值即为最佳权值。
在自适应一次、二次对消中,我们假设杂波以10m/s的速度径向运动,fdc=2Vrc/λ,所以运动杂波的多谱勒频率fdc=400Hz,仿真结果如下表4所示。

对于自适应滤波器而言,增加滤波阶数不能无限制地增加系统改善因子,相反,会增加系统复杂性,降低系统的反应速度。表4均为理想值,在实际应用中指标还应下降3-5kB。[2]

表5示出了在三级海情,四种组合方式下的对消改善效果比较。
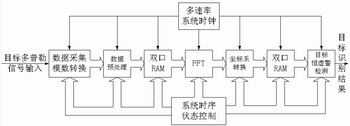
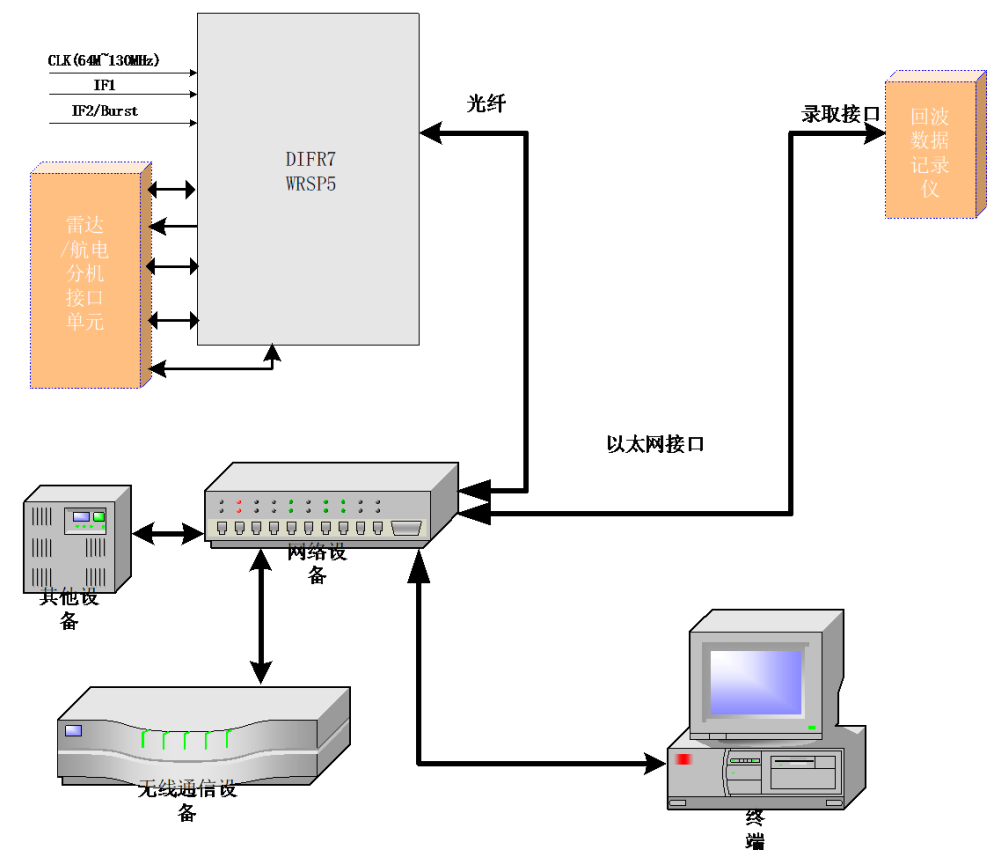
3 动目标处理系统实施方案
(1)采用正交双通道复信号处理模式,数字正交复信号在进入动目标处理系统前,已经过自适应旁瓣相消与数字脉冲压缩系统,形成脉冲宽度恒定的数字正交复信号。为保证动目标处理系统的性能,输入的I、Q支路信号的幅度一致性和相位的正交性必须满足一定的要求。
(2)采用以现代数字信号处理器ADSP21062为核心,实现对地杂波、海杂波、气象杂波的自适应滤波。完成多方式的动目标处理,具有设备量小、成本低、可靠性高、运算密集度高、实时性强等特点。
(3)CFAR处理技术,系成熟技术,在此不再赘述。
4 结束语
综上所述,可以得出如下结论:
(1)A/D变换器位数应大于10位。
(2)正交双通道幅相不一致性和相位不一致性应分别限制在1%、1度以内。
(3)雷达应选择高稳定性的微波频率源。
(4)在不同的情况下选择不同的对消方式,在观测地杂波很强的回波时可采用二次固定对消器;在海杂波和气象杂波较强时,可采用一次固定对消器加二次自适应对消方式,在对消效果不理想时还可以通过自动调整自适应对消器的权系数以获得最佳的效果。
此方案可以满足地杂波的改善因子大于40dB,海杂波的改善因子大于35dB,气象杂波的改善因子大于20dB的要求。提高雷达对运动目标测量和显示的精确性。
2 陈建春,耿富录.自适应运动杂波抑制技术.西安:西安电子科技大学学报,1999,26(2):174~177














 工商网监
工商网监
评论