 电子发烧友App
电子发烧友App


软件无线电(Software-Defined Radio)是最近几年来提出的一种新的实现无线通信的体系结构。它的基本概念是把硬件作为无线通信的基本平台,而把尽可能多的无线及个人通信功能用软件实现,打破了有史以来设备通信功能的实现仅仅依赖于硬件发展的格局。SDR主要依靠软件来完成接收系统的各项功能,如智能天线、信号识别、调制解调等,其优点在于可以使产品的硬件大大简化,可靠性大大提高,便于生产和维护,可以通过更新软件来实现产品的功能升级等。数字化调制、解调是软件无线电技术(SDR)中的一个重要内容。π/4QPSK信号相对一般的QPSK信号具有频谱更加集中,更有利于实现位同步的优点。数字化调制的基本要求是产生性能好的调制信号波形,计算量小。
本课题是基于基带波形数字化生成的π/4QPSK信号调制技术的研究。首先介绍了软件无线电以及调制解调技术,然后提出一种数字化调制算法,把基带波形调制成π/4QPSK信号,并用MATLAB语言仿真出具有典型性的π/4QPSK信号,最后再对各种数字化调制技术进行比较分析。
关键词: 软件无线电,π/4QPSK信号,数字化调制,仿真
摘要
ABSRACT
第一章 绪论…………………………………………………………………………1
1.1软件无线电的发展……………………………………………………………………1
1.2软件无线电的原理……………………………………………………………………1
1.2.1 软件无线电的基本概念………………………………………………………1
1.2.2 软件无线电的基本结构………………………………………………………2
1.3 软件无线电的实际应用和发展前景………………………………………………3
1.4 课程设计内容………………………………………………………………………4
第二章 软件无线电中的调制和解调技术……………………………………………5
2.1 软件无线电中的调制技术…………………………………………………………6
2.1.1 常见数字调制技术介绍………………………………………………………6
2.1.2 调制技术的实现原理…………………………………………………………7
2.2 软件无线电中的解调技术…………………………………………………………8
2.2.1 数字化正交解调的实现原理…………………………………8
2.2.2 基于DFT的数字化解调技术………………………………….9
第三章 π/4QPSK信号调制算法的研究………………………………………………10
3.1 QPSK信号与π/4QPSK信号原理……………………………………………………10
3.1.1 QPSK信号………………………………………………………………………10
3.1.2 π/4QPSK信号…………………………………………………………………11
3.2 π/4QPSK信号电路实现研究………………………………………………………12
3.2.1 π/4QPSK信号电路框图分析…………………………………………………12
3.2.2 π/4QPSK信号调制原理分析…………………………………………………13
3.2.3 π/4QPSK信号电路实现波形…………………………………………………14
3.3 π/4QPSK信号数字化调制算法实现………………………………………………15
3.3.1 π/4QPSK信号数字化调制框图………………………………………………15
3.3.2 π/4QPSK信号数字化调制算法分析…………………………………………16
第四章 π/4QPSK信号数字化调制的仿真……………………………………………27
4.1 MATLAB简介…………………………………………………………………………27
4.2 π/4QPSK信号数字化调制MATLAB实现分析…………………………………… 29
4.2.1 数字化调制MATLAB实现框图……………………………………………… 29
4.2.2 MATLAB编码解析……………………………………………………………… 30
4.3 具有典型性的π/4QPSK信号波形…………………………………………………32
4.4 π/4QPSK信号性能研究……………………………………………………………33
4.5 其他数字化调制方式及其比较……………………………………………………34
第五章 毕业设计总结…………………………………………………………………36
5.1 设计中有待改进之处………………………………………………………………36
5.2 收获和心得…………………………………………………………………………36
结束语……………………………………………………………………………………38
参考文献…………………………………………………………………………………39
附录………………………………………………………………………………………40
摘 要
ABSTRACT
SDR(Software-Defined Radio) is a new wireless communication design arising in recent years. Its basic concept is to make hardware as the basic wireless communicational platform, while maximally using software to implement wireless and personal communicational functions, which breaks functional realization of the communicational equipment relying only on hardware development. SDR depends mainly on software to complete systemic functions of the receiver, such as smart antenna, signal identification, modulation and demodulation. The advantage of SDR is greatly simplifying the hardware products, largely enhancing reliability, ease of production and maintenance, being able to upgrade the products` function through updating software. Digital modulation, demodulation is one of the important parts in SDR. π/4QPSK signal has a more focused spectrum compared with the general QPSK signal, more favorable to achieve synchronization. The basic requirement of digital modulation is producing modulation signal waveform with better performance, less calculation.
This paper is the modulation technical research of digital generating π/4QPSK signal based on the base-band waveform. Firstly, the paper introduces SDR and modulation and demodulation, then raises a digital modulation algorithm, and modulates base-band waveform into π /4QPSK, uses MATLAB to simulate out typical π /4QPSK signal, finally, compares with various modulation techniques.
KEY WORDS: Software-Defined Radio(SDR), π/4QPSK signal, digital modulation, simulation
第一章 绪论
1.1 软件无线电的发展
软件无线电(SDR)是最近几年来提出的一种新的实现无线通信的体系结构。
1992年5月,MILTRE公司的Jeo Mitola首次明确提出了软件无线电(soft radio)的概念,它的基本思想是构建一个具有开放性、标准化、模块化的通用硬件平台,把硬件作为无线通信的基本平台,而把尽可能多的无线及个人通信功能,如工作频段、调制解调类型、数据格式、加密模式、通信协议等用软件来实现【1】.这样,无线通信新系统、新产品的开发将逐步转到软件上来,而无线通信产业的产值将越来越多地体现在软件上.这是继模拟到数字、固定到移动之后,无线通信领域的又一次重大突破。因此,有些人把软件无线电称为”超级计算机”。
软件无线电的主要特点可以归纳如下:
1. 具有很强的灵活性。软件无线电可以通过增加软件模块,很容易增加新的功能。可以与其他任何电台进行通信,并可以作为其他电台的射频中继。可以功过无线加载来改变软件模块或更新模块。为了减少开支,可以根据所需功能的强弱,取舍选用的软件模块。
2. 具有较强的开放性。软件无线电由于采用了标准化、模块化的结构,其硬件可以随着器件和技术的发展而更新或扩展,软件也可以随需要而不断升级。软件无线电不仅能和新体制电台通信,还能和旧体制电台兼容。这样,既延长了旧体制电台的使用寿命,也保证了软件无线电本身有很长的生命周期。
软件无线电这一新概念一经提出,就得到了全世界无线电领域的广泛关注。由于软件无线电所具有的灵活性、开放性等特点,使其不仅在军、民无线通信中获得应用,而且将在其他领域例如电子战、雷达、信息化家电等领域得到推广,这将极大促进软件无线电技术及其相关产业(集成电路)的迅速发展。
1.2 软件无线电的原理
1.2.1 软件无线电的基本概念
软件无线电的基本思想就是将宽带模数变换器(A/D)及数模变换器尽可能地接近天线,建立一个具有”AD-DSP-DA”模型的通用的,开放的硬件平台,在这个平台上尽量利用软件技术来实现电台的各种功能模块。如使用宽带ADC通过可编程来实现各种通信频段的选择,如HF,VHF,UHF,SHF等,通过软件编程来完成传送信号抽样,量化,编码、解码运算处理和变换,以实现射频电台的收发功能;通过软件编程实现不同的信道调制方式的选择,如调幅,调频,单边带,数据,跳频和扩频等,通过软件编程实现不同的保密结构,网络协议和控制终端功能等,软件无线电是软件化,计算密集型的操作形式。
从软件无线电的技术实现来看,决定性的步骤在于将A/D和D/A变换器尽量向射频端靠拢应用宽带天线或多频段天线,并将整个中频段作A/D变换,这之后整个的处理都用可编程数字器件特别是软件来实现。可看出,这样一个体系结构具有非常大的通用性。对解决上面提到的问题有很大的潜力,可用来实现多频段、多用户和多体制的通用无线通信系统.要实现以上系统,对天线,高速A/D变换器和高速的数字信号处理器和通用CPU的要求都很高。这些要求在以前(甚至某些要求对现在)都几乎是不可实现的。然而我们可以参考个人计算机领域的经验,在个人微机的概念提出初期,计算机行业也是各种不同的机器相互竞争,没有什么标准可言。由于当时的微电子技术还很落后,大多数人认为个人拥有计算机是不现实的。仅仅过了十几年的时间,微电子技术的发展已经使得个人微机成为了当今最热门的产业,而那些在发展初期没有抓住时机的公司和国家也远远地落后了。如今微机领域的竞争早以将重点转移到了软件的竞争上了。而下个世纪的个人通信系统将很有可能是一个具有惊人处理能力和标准射频接口的通用硬件平台,依靠不同的软件提供异常丰富的功能和服务,也就是说通信领域将经历类似于个人微机在八九十年代所经历的变革,而现在正是这一变革的关键时刻。
1.2.2 软件无线电的基本结构
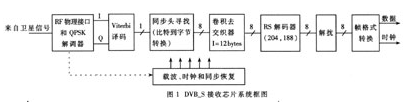
典型的软件无线电系统包括天线、多频段射频变换器、含有A/D和D/A变换器的芯片以及片上通用处理器和存储器等部件,可以有效地实现无线电台功能及其所需的接口功能【2】。其功能结构框图如图1.1:
图1.1 软件无线电的基本结构
其关键思想和与传统结构的主要区别在于:1)将A/D和D/A向RF端靠近,由基带到中频段对整个系统频带进行采样;2)用高速DSP/CPU代替传统的专用数字电路与低速DSP/CPU做A/D后的一系列处理。A/D和D/A移向RF端仅为软件无线电的实现提供了必要条件,关键步骤是采用通用的可编程能力强的器件(DSP和CPU等)代替专用的数字电路,由此带来的一系列好处才是软件无线电的真正目的所在。
1.3 软件无线电的实际应用和发展前景
软件无线电发展迅速,在通信领域中有极广泛的应用,主要概括为以下几点:
1. 个人移动通信中的应用
个人移动通信已从第一代FDMA模拟蜂窝移动通信发展到第二代蜂窝移动通信(GSM和CDMA),目前正在向第三代WCDMA移动通信(3G)系统发展。未来的个人移动通信要达到的目标是:任何人在任何时间、任何地点都可以和其它任何人进行任何种类(话音、数据和图像等)的通信。由于越来越大的通信需求,一方面使通信产品的生存周期短,开发费用上升;另一方面,新老体制通信共存,各种通信系统之间的互联变得更加复杂和困难,因此要寻求一种既能满足新一代移动通信需求,又能兼容老的体制,而且更具扩展能力的新的个人移动通信体系结构就成为人们努力的方向。而软件无线电正好提供了解决这一问题的技术途径,成为第三代移动通信系统研究的热点。
2. 军事通信中的应用
软件无线电的术语最早是美军为了解决海湾战争中多国部队各军进行联合作战时所遇到的互通互联互操作问题而提出来的一个新概念。因为以往的军事通信装备无论是工作频段,还是信息传输格式或者通信体制,陆海空三军各自为政,互不兼容,导致在联合作战时各军种之间法进行快速沟通、互传信息情报,结果是名义上的联合作战,而实际上只是各军种的简单参与,完全形成不了真正意义上的”联合”。软件无线电则能解决上述问题,是各军种真正的”联合起来”。
3.卫星通信中的应用
卫星通信是当代最重要的通信方式之一,但是由于目前卫星通信系统设备种类繁多,设备管理和维护工作复杂,使得卫星通信系统更新换代周期长,不能很好地适应现代高科技的发展步伐。同时考虑到卫星通信频带宽,信息速率高且变化范围大的特点,在目前的计算机技术水平上,如果设备功能全由软件来实现,由于软件的逐条运行指令的特点,即使采用多处理器来协同运算,也无法实现高信息速率下的实时处理,使其在卫星通信中的使用范围受到了限制。而软件无线电以其软件定义功能和开放式模块化结构的技术思想能很好地解决卫星通信系统存在的问题。
4. 数字电视系统中的应用
20世纪90年代广播电视领域掀起划时代的数字革命,以高清晰度电视(HDTV)为标志的第三代电视达到了理想的视听功效,成为新的一代数字电视发展方向。HDTV信源编码速率达25MHz, 为了使HDTV能在现有的模拟电视信道(带宽为6MHz~8MHz)上进行传输广播,必须对HDTV进行信道编码,以压缩传输带宽。所谓信道编码就是选择合适的调制方式,把25Mbps的视频数据调制到射频上,并保持其带宽在6MHz~8MHz范围内。信源编码现已有统一标准,采用MPEG-2, 而信道编码在国际上还没有统一的标准,它将会各种体制并存。为完成信源编码和多种
体制的信道编码,采用软件无线电来实现就比较方便。
SDR的前景光明,它代表了一些无线技术的未来。像任何其它技术一样,随着器件和应用系统的不断改进,SDR技术也在不断发展。虽然SDR目前的应用规模相对较小,但它的定义以及在行业中的地位正逐渐形成。蜂窝电话基站和军用无线电只不过是SDR应用的一个开端,随着芯片集成度的提高和软件技术的进步,SDR将得到更广泛的采用。
1.4 课题设计内容
数字化调制是指用软件产生出调制信号的采样序列,再通过D/A转换得到模拟的调制信号,数字化解调则是指对已调波信号进行A/D转换,再通过数据处理来实现对信号的解调。数字化调制、解调是软件无线电技术(SDR)中的一个重要内容。SDR主要依靠软件来完成接收系统的各项功能,如智能天线、信号识别、调制解调等,其优点在于可以使产品的硬件大大简化,可靠性大大提高,便于生产和维护,可以通过更新软件来实现产品的功能升级等。π/4QPSK信号相对一般的QPSK信号具有频谱更加集中,更有利与实现位同步的优点。数字化调制的基本要求是产生性能好的调制信号波形,计算量小。本课题要求:
(1)对SDR的基本内容进行研究,重点是数字化调制、解调技术。
(2)设计一个基于基带脉冲数字成形的π/4QPSK信号数字化调制算法。
(3)用MATLAB语言编程产生出具有典型性的π/4QPSK信号。
(4)对调制信号的性能进行研究,与其它的数字化调制方法进行比较。
第二章 软件无线电中的调制和解调技术
软件无线电中信号的调制与解调是研究的重点问题之一。在通用的硬件平台上,采用不同的软件算法来实现不同调制与解调是软件无线电的核心思想。
使调制解调算法软件化是软件无线电研究的重点。比如要对AM(Amplitude Modulation,调幅)信号进行相干解调,或建立载波同步,乘法器,低通滤波等软件模块的做法虽然可行,但是计算量很大。在软件无线电系统中,调制和解调都是用程序来实现的(也称为全数字化调制解调)。要编写出各种类型调制信号的调制解调软件,关键是确定信号处理算法。可以利用FPGA(Field Programmable Gate Array,现场可编程逻辑器件)来实现需要的调制解调算法,其计算速度比DSP更快,但是灵活性及控制功能较差,需要与DSP或单片机配合使用。最新的一项技术是可以利用DFT来实现数字化调制解调算法,这是一种不需要本地载波的方法,本文将做重点介绍。
调制解调技术在近几十年中得到了不断的发展和完善,总的来说可以分为两大类:单音调制和多音调制【3】。单音调制方式即在某一时刻用输入数据对单一载波的不同分量(如幅度、频率、相位等)进行调制,因此也称为单载波调制。多音调制通常是将原始信道划分为等间隔的多个正交子信道,每个子信道使用不同的载波进行调制,故多音调制也称为多载波或多路并行调制,有时也称为OFDM(Orthogonal Frequency Division Multiplexing,正交频分复用)。
由于单载波调制技术比较成熟,所以目前的数据通信系统中多采用这种调制方式。但自从1971年Weinstein、Ebert等人提出将DFT用于多音调制系统中的频分复用以后,多音调制技术受到了越来越广泛的关注。相对单音调制来说,它具有如下特点:采用多音调制方案与采用判决反馈均衡的单音调制方案所得到的最大传输速率近似相等。然而,对于存在失真、衰落或非白噪声的信道来说,多音调制可以获得更高的传输速率;由于多音调制具有多路并行的特点,使得其调制信号在接收端不需进行任何特殊的处理,即可获得相当于单音调制解调系统在接收端采用信道均衡后所得到的信噪比或信号干扰比;为了能够获得更佳的传输性能,可以在多音调制系统中采用均衡技术,由于每个窄带子信道中的信道特性近似是线性的且脉冲响应拖尾较少,使得多音调制的均衡较单音调制的均衡简单得多;相位抖动在单音调制系统的接收端将引起信号在空间的旋转,从而严重地影响了判决:而在多音调制系统中,相位抖动所引起的失真均匀地分布在各个子通道中,使得其影响大大地减弱了;在传输速率相同的情况下,由于多音调制系统中的码元周期较长,使得脉冲干扰对它的影响远弱于对单音调制的影响;在单音调制系统中,对于单频干扰较为敏感,而在多音调制系统中各子信道可以根据各自信噪比大小传送不同的比特数,并可封闭干扰严重的信道,这样既能充分地利用频带,又可克服多种干扰。
从上述特点可以看出,多音调制在信道失真或存在干扰的情况下可以获得较高的传输性能,而且还可以根据信道的不同情况对每个子信道进行最佳的速率分配,可以适用于速率可变的信息传输。因此,我们将采用多音调制技术来实现软件无线电中的调制解调。
2.1 软件无线电中的调制技术
2.1.1 常见数字调制技术介绍
在数字传输系统中,其传输对象通常是二进制数字信息,它可能来自计算机、网络或其它数字设备的各种数字代码。也可能来自数字电话终端的脉冲编码信号,设计数字传输系统的基本考虑是选择一组有限的离散的波形来表示数字信息。这些离散波形可以是未经调制的不同电平信号,也可以是调制后的信号形式。数字信号的基本调制方式有以下几种:
(1)2ASK信号调制技术:
以二元码来键控载波的幅度,即为幅移键控(ASK),在一个码元持续期 内,ASK信号是”传号”或是”空号”,两者必居其一,即:
(2)2FSK信号调制技术:
以二元码来键控载波的频率,即为频移键控(FSK),它的表达式可表示为:
(3)2PSK信号调制技术:
以双极性不归零码序列对载波幅度实施键控,就可构成相移键控(PSK),它的表示式为:
数字调制技术具有抗干扰能力强、易于加密、语音间隙噪声小等优点。随着数字通信的发展,对频带占有率和利用率都提出了更加严格的要求。例如美国规定,在占有的频带中至少要包含整个信号频谱的99%功率,即带外辐射功率不得超过1%;要求传输比特率必须等于或大于规定的频带宽度。这意味着数字调制的已调信号必须是带限的,而且其带限范围越窄越好。例如移动通信的频道间隔只有25kHz,为了频率资源的充分利用,正朝12.5kHz推进。同时,信道传输特性的非线性只有
所谓的调幅、调相,当输入信号的幅度变化时,将转化为输出信号的相位变化,从而再次产生新的带外分量,引起频谱再生。因此,传统的数字调制方式必须改进,以适应发展的需要。目前正在研究的调制方式常见的有相干移相(CPSK)、四相移相键控(QPSK)、高斯最小相移键控(GMSK)等调制方案。在设计数字系统时 ,选择何种数字调制方式是十分重要的问题。但数字调制方式的选择往往是频带利用率、误比特率、信噪比和设备实现复杂性等因素综合考虑的结果 ,必须根据具体使用条件进行比较才能做出判断 。
2.1.2 调制技术的实现原理
随着当代通信的飞速发展,通信体制的变化也日新月异:一些旧的通信方式或者被改进完善,或者被淘汰,适合当代通信体制的新通信方式不断涌现并且日臻完善。日前常用的调制方式在2.1.1小节中已经做了介绍。如果按照常规的方法,产生每一种信号就需要一种硬件电路,甚至一个模板,那么要使一部通信机中产生几种、十几种通信信号,其电路就会及其复杂,体积重量都会很大。如果要增加一种新的通信方式就非常困难。
软件无线电中的各种调制信号是以一个通用的数字信号处理平台为支撑,利用各种软件来产生的。每一种跳至算法都做成软件模板形式,要产生某种调制信号只需调用相应的模块即可【1】。用于各种调制用软件实现,因此在软件无线电中,可以不断地更新调制模块的软件来适应不断发展的调制体制,具有相当大的灵活性和开放性。软件无线电的各种调制完全可以基于数字信号处理技术来实现。
在当代通信中,通信信号的种类很多,从理论上来说,各种通信信号都可以用正交调制的方法加以实现,如图2.1所示。
图2.1 正交调制的实现框图
任何一个无线电信号均可表示为
(2.1)
对式(2.1)式进行数字化处理,可得
(2.2)
为了便于进行信息调制,对于数字调制系统,通常把式(2.1)进行正交分解:
(2.3)
式中
该调制的方法是先根据调制方式求出 、 ,然后分别与两个正交本振 相乘并求和,即可得到调制信号 。
2.2 软件无线电中的解调技术
2.2.1 数字化正交解调的实现原理
在软件无线电系统中,调制和解调都是用程序来实现的(也称为全数字化调制解调)。要编写出各种类型调制信号的调制解调软件,关键是确定信号处理算法。可以利用FPGA(现场可编程逻辑器件)来实现需要的调制解调算法,其计算速度比DSP更快,但是灵活性及控制功能较差,需要与DSP或单片机配合使用。
建立调制解调算法及程序的一条途径是把模拟电路的工作原理软件化。比如要对AM信号进行相干解调,或建立载波同步!乘法器!低通滤波等软件模块的做法虽然可行,但是计算量很大。实际上,根据软件无线电的特点,可以建立与调制解调电路工作原理有所不同的调制解调算法。
图2.2为SDR接收机中广泛使用的数字正交解调方案【4】。这是一个具有通用性的解调模型,对不同方式的调制信号只需要设计相应的基带解调算法。对于AM信号,基带解调算法为 。对LPF的输出进行数据抽取是因为基带信号I、Q需要的采样率远低于对调制信号的采样率。这种解调方案利用软件中可以实现的平方和开方运算而免去了复杂的载波同步过程,不仅减少了计算量,也避免了因载波同步误差而引起的解调误差(相位同步误差和比较小的频率同步误差都不影响解调效果)。因为仍然是相干解调,所以这种解调方案具有良好的抗干扰性能。
图2.2 数字正交解调方案
2.2.2 基于DFT的数字化解调技术
文献[4]中提到的解调方法计算量还是比较大的,因为对每一次采样值都要分两路进行乘法,并经过阶数较高的低通滤波器。而基于DFT( 离散傅立叶变换) 的AM信号解调算法, 要点是对低中频AM信号进行整周期采样( 比如取采样频率为载波频率的8倍),对每一个载波周期内的采样点( 记为x1~x8) 进行DFT, 计算出载波的幅值
A(n):
(2.4)
(2.5)
(2.6)
显然, 去除直流成分后, A(n) 序列便是需要的解调输出。与一般的正交解调算法相比较, 由于省去了低通滤波和数据抽取过程, 对采样数据基本上只做加减运算, 每8个采样点才做一次平方、开方运算, 计算量大大降低,为采用”中频采样-DSP解调”方案创造了条件。采用较低的采样频率(比如每个载波周期采样4个点)也可以正常解调,当然较高的采样频率对抑制噪声是有利的。
数字化解调是软件无线电中的重要内容,从SDR的特点出发针对各种类型的调制信号提出计算量小,性能好的解调算法对于SDR技术的完善和推广应用具有明显的意义。基于DFT预算的AM和QDPSK信号的解调技术省去了滤波器和数据抽取,减少了计算量,有利于采用”中频采样-DSP解调”方案。这种解调算法也可以推广到MQAM,
π/4QPSK等调制信号的解调中。
第三章 π/4QPSK信号调制算法的研究
3.1 QPSK信号与π/4QPSK信号原理
3.1.1 QPSK信号
四相相移键控调制QPSK,其本质也是利用前后码元之间载波振荡相位的相对变化来传递信息,因此QPSK信号可以看作两个载波正交2PSK信号的合成。由于以前一个码元信号相位代替了提取的基频相位 ,因而克服了标准振荡相位的不确定性,并且它的频带利用率也要比二元PSK信号提高了1倍。但是当两路信号同时发生变换时,QPSK信号的相位会发生180°突变。由于瞬时频率是相位的微分,因此相位的突变相当于瞬时频率趋于无限。当180°相位突变的信号通过有限带宽的带通滤波器后输出波形就有变化,即在相位突变180°的时刻,就会出现已调波的包络跌到为零,因而造成包络起伏过大。这种已调信号的波形经过非线性期间后,由于限幅放大,原先在码元转换点跌到零的包络也会再一次升起。这又相当于恢复到恒定包络,即恢复到原先频带不受限制的情况。换句话说,经带通滤波器滤除的功率谱旁瓣又将涌现出来,或叫展宽频带【6】。
QPSK调制利用载波的四种不同相位来表征数字信息。由于每一种载波相位代表两个比特信息,故每个四进制码元又称为双比特码元。我们把组成双比特码元的前一个信息比特用a代表,后一信息比特用b代表。双比特码元中的两个信息比特a b通称是按格雷码排列的,它与载波相位的关系如表3.1,表3.2。它的矢量关系如图3.1,其中(a)是A方式时QPSK信号的矢量图,(b)是B方式时QPSK信号的矢量图:
(a) (b)
图3.1 QPSK调制的矢量图
也可以用格雷码来表示QPSK信号,如下表3.1逻辑编码表(1)和表3.2逻辑编码表(2),表中分别以 0°和 45°载波相位作为参考相位。左边载波相位为0°,90°,180°,270°四种,代表信息分别为 00, 01, 11, 10。右边载波相位为 45°, 135°, 225°, 315°四种,代表的信息分别为11,01,00,10。
表3.1 A方式时QPSK逻辑编码表
a路码元 b路码元 前后码元相对位移
a b △θ =θ =θ
0 0 0
0 1 90
1 0 180
1 1 270
表3.2 B方式时QPSK逻辑编码表
a路码元 b路码元 前后码元相对位移
a b △θ =θ =θ
0 0 225
0 1 135
1 0 270
1 1 45
采用QPSK信号常会8出现”相位模糊”现象,为了客服接收端恢复出的本地相干载波存在的”相位模糊”,与二元PSK采用差分码构成相对相移键控(DPSK)的方法一样,四元调相也可利用前后两个码元载波相位的相对变化来传递信息,即构成四相差分调相(QDPSK)。
3.1.2 π/4QPSK信号
美国数字移动电话的标准由美国的通信工业会(TIA)制定,它使用800MHz频段,频道间隔为30kHz,数码率为48.6bit/s。数字调制方式采用的就是我要研究的π/4QPSK信号。日本的数字移动电话也采用了此方式,但频道间隔为25kHz,数码率为42kbit/s,使用频段分配为800MHz和1.5GHz。
由于虽然QPSK调制具有比2PSK调制频带利用率提高一倍的优点,但是QPSK调制的载波有4种相位变化,即 0°、90°、180°、270°或 45°、135°、225°、315°。当载波相位突变 ,特别是出现 180°突变时 ,载波包络为零 ,使载波信号功率谱扩展,从而造成信号带限失真,也就是上一节介绍的展宽频带。
为改进QPSK调制信号的频谱特性,把QPSK调制的A、B两种方式的矢量图合二为一 ,并且使载波相位只能从一种模式 (A或B)向另一种模式(B或A)跳变 ,其中 ,”●”表示QPSK调制A方式的矢量图 ,”○”表示QPSK调制B方式的矢量图 ,从而构成π/4QPSK调制的矢量图,如图3.2所示。矢量图中的箭头表示载波相位的跳变路径,显然,相位变化只有±45°和±135°4种状态 ,不存在180°相位跳变 ,因此较QPSK调制具有更好的频谱特性【6】。
图3.2 π/4QPSK调制的矢量图
π/4QPSK虽然不是恒定包络,但包络线的变化很小。它要求高频放大器线性工作范围比一般QPSK所需要的线性工作范围要小。π/4QPSK的设计就是以能使用具有一定程度线性的甲乙类高频放大器为出发点的。
3.2 π/4QPSK信号电路实现研究
3.2.1 π/4QPSK信号电路框图分析
π/4QPSK调制的系统框图如图3.3示,在QPSK调制系统的基础上,增加了一个映射逻辑电路。输入的数据流经串/并电路后,变换成I 和Q 双bit符号,输至映射逻辑电路【10】。映射逻辑电路的功能为:
(3.1)
(3.2)
图3.3 π/4QPSK调制的系统框图
其中 ,Δθ 是输入双bit符号 { a , a }所对应的相移值,相移值的大小符合表3.1所示规律。需要说明的是,与图3.3对应的相移值是QPSK调制的B方式 ; I 和Q 分别为双bit符号a 与a 经映射逻辑变换后输出的同相和正交支路双bit符号 ;I 和Q 分别为双bit符号 经映射逻辑变换后输出的同相和正交支路双bit符号。a 和a 有(0,0),(0,1),(1,0),(1,1)4种组合,经映射逻辑变换后,输出有8种取值: 如图3.2所示。在映射逻辑输出的数据流中,第k个同相正交双bit符号I 、Q 的合成相位值用 表示,第k-1个同相正交双bit符号I 、Q 的合成相位值用θ 表示。
3.2.2 π/4QPSK信号调制原理分析
为了求得I 、Q 的合成相位,将I 、Q 的8种取值
逐一代入(3.1)式和(3.2)式:
(1)(I ,Q ) =( 1,0)时 , θ =0°
(2)(I ,Q ) =( 1/ ,1/ )时 , θ =45°
(3)(I ,Q )=( 0,1)时 , θ =90°
……
同理 ,(I ,Q )=
时 ,
均有
如果令
(3.3)
则有
有上可得:
于是得到π/4QPSK调制系统输出信号数学表达式为
(3.4)
由此可知 :π/4QPSK调制系统输出信号的相位为 , 随输入数据流变化的跳变关系 ,就是π/4QPSK调制系统输出信号相位随输入数据流变化的跳变关系。再由式 (3.4)可知,π/4QPSK调制系统输出信号相位由 决定,根据 ( 3.3 )式对 的定义 ,很容易求出输入数据流变化时,π/4QPSK调制系统输出信号的相位变化关系。
3.2.3 π/4QPSK信号电路实现波形
根据3.2.1的原理分析,对于任一组输入数据流”00110110010110… …”,都可以有相应的输出,输出波形如图所示,显然,相位变化有±45°和±135°4种状态 ,不存在180°相位跳变 ,因此较QPSK调制具有更好的频谱特性。电路实现的π/4QPSK信号波形如下图3.4所示。
图3.4 π/4QPSK信号电路实现波形
3.3 π/4QPSK信号数字化调制算法
3.3.1 π/4QPSK信号数字化调制框图
在本课题设计中,要求设计一个基于基带波形数字成形的π/4QPSK信号数字化调制算法,也即是使用数字化调制技术把基带波形调制成π/4QPSK波形。传统π/4QPSK信号调制算法中往往要使用数字滤波器,当阶数较高时,一方面不容易计算量非常大,另外又产生很多高频分量。例如使用一个32阶的IIR数字滤波器完成16点滤波,计算一点要用到65次乘法和加法运算,计算16个点时就要用到65*16次乘法和加法运算,带来了很大的麻烦。而使用数字化调制实现,则可以避免出现以上所提到的问题,并且它还对过渡区实现余弦函数平滑过渡,避免了相位改变时的剧烈跳变,大大减少了高频分量。数字化调制方案如下图3.5所示:
图3.5 π/4QPSK信号调制方案
对于任意一组数据流,通过串/并转化成两组码元,分别为偶数流和奇数流,然后通过映射逻辑电路得到波形生成的I 和Q ,在此过程中不需要经过低通滤波器进行,而是直接进行函数的调用,最后对I 和Q 进行采样,就得到π/4QPSK信号。
3.3.2 π/4QPSK信号数字化调制算法分析
根据(3.2)中关于π/4QPSK信号调制原理的分析,可知I Q 不仅与输入数据(Δθ)有关,而且与I 和Q 有关。利用星座中前一时刻的绝对相位θ和有当前时刻输入I Q 决定相位偏移量Δθ,找到由当前绝对相位θ+Δθ决定的输出I 和Q 。相位偏移量Δθ可以转化成相应的编号偏移量ΔN【11】。Δθ和ΔN的对应关系如下表3.3:
表3.3 Δθ和ΔN的对应关系
I Q
00 01 10 11
Δθ (- )
偏移量编号 5 3 7 1
又由图(3.5)中π/4QPSK信号数字化调制方案,可知如何求出经过映射逻辑电路的I 和Q 是本课题设计的一个关键。
首先设前一码元的矢量号为S ,对应的I 、Q 分量为I 、Q ;本码元的矢量号为S ,对应的I 、Q 分量为I 、Q 。前一码元和本码元的分析如下:(其中1、3、5、7分别代表11、01、00、10的矢量号)
若本码元为00,则S =mod(S +5,N );
若本码元为01,则S =mod(S +3,N );
若本码元为10,则S =mod(S +7,N );
若本码元为11,则S =mod(S +1,N );
其中 为前一码元最后一个采样点的归一化相位(整数, ),因为信号的每个载波周期要进行16点采样,所以这里的N 是小于等于16的。
有了本码元就可以知道相位偏移量Δθ,也就是找到由当前绝对相位θ+Δθ决定的输出I 和Q ,可先列出绝对相位和当前输出I Q 之间的关系,如表3.4:
表3.4 绝对相位和当前输出I Q 之间的关系
N 0 1 2 3 4 5 6 7
θ 0
π
I
1 0.707 0 -0.707 -1 -0.707 0 0.707
Q
0 0.707 1 0.707 0 -0.707 -1 -0.707
可见,只要有了相位偏移量,就可以得到所要求的当前时刻的输出I Q ,然后对波形成形的I ,Q 进行采样,最后把所得采样后信号相加,就得出所需的经过数字化调制的π/4QPSK信号。
为了简单易行,首先不妨先假设输入一组数据流”00110110… …”,来进行数字化调制。按照数字化调制结构框图(3.5)可得,这组数据首先经过串/并变换,于是可以得到奇、偶数组{ a ,a },即{ a ,a }={ 00;11;01;10… …},其中每两个数据为一组码元,然后然这组码元再通过映射逻辑电路,经过数据的调用,可以得到波形生成的I 、Q 。
在设计中,设每个码元包含10个载波周期(即f =10R ),其中码元波形的前面3个载波周期为过渡区,后面7个载波周期为稳定区。每个载波周期采样16点 ,因此可求的过渡区共有16 3=48个采样点,稳定区有160-48=112个采样点。
由于前三个载波周期是过渡区,因此首先研究过渡区的情况,在保持码元稳定区为余弦函数的前提下,在信号相邻码元之间的过渡区采用余弦函数进行过渡,直到下一个码元的稳定区。这样一来,在信号相邻码元之间的过渡区内最大相位差的绝对值趋近于零,从而避免了相位改变时的剧烈跳变,可以大大抑制谐波分量【12】。由此可见, 平滑相位π/ 4QPSK 调制与普通π/ 4QPSK调制的区别主要体现在引入了平滑函数。
由3.1.2节中的分析,π/ 4QPSK信号的相位突变有± 和± 四种情况,因此分以下四种进行讨论:
(1)码元相位跳变为
设载波峰值为1,前一码元的矢量相位为0,则本码元矢量相位为 ,即从
(1,0) 跳到(0.707,0.707),过渡区采用余弦函数过渡,信号矢量变化过程如
图:
图3.6 信号矢量变化过程
一个码元过渡区共有采样48个采样点,对于过渡区内的第i个采样点,I 和Q 值可以得到分别为:
, i=1、2、……48 (3.5)
, i=1、2、……48 (3.6)
在求I 和Q 值的过程中要不断的调用余弦函数c(i):
(3.7)
可先列出该函数调用表3.5如下:
表3.5 余弦函数 调用表
i 1 2 3 4 5 6 7 8
c(i) 0.99786 0.99144 0.98079 0.96593 0.94693 0.92388 0.89687 0.86603
i 9 10 11 12 13 14 15 16
c(i) 0.83147 0.79335 0.75184 0.70711 0.65935 0.60876 0.55557 0.5
i 17 18 19 20 21 22 23 24
c(i) 0.44229 0.38268 0.32144 0.25882 0.19509 0.13053 0.065403 6.1232e-017
i 25 26 27 28 29 30 31 32
c(i) -0.06540 -0.13053 -0.19509 -0.25882 -0.32144 -0.38268 -0.44229 -0.5
i 33 34 35 36 37 38 39 40
c(i) -0.55557 -0.60876 -0.65935 -0.70711 -0.75184 -0.79335 -0.83147 -0.86603
i 41 42 43 44 45 46 47 48
c(i) -0.89687 -0.92388 -0.94693 -0.96593 -0.98079 -0.99144 -0.99786 -1
同时也可以列出余弦函数 的调用图,如下图3.7:
图3.7 余弦函数 的调用图
有了调用表之后,就可以求出当相位偏移量为 时,经过余弦函数过渡的I 和Q 值。因此可以根据(3.5)和(3.6)式列出波形生成后的I 和Q ,如下表3.6:
表3.6 输出I 和Q 的调用表
i 1 2 3 4 5 6 7 8
0.99969 0.99875 0.99719 0.99501 0.99223 0.98885 0.98489 0.98037
0.00075687 0.0030242 0.0067924 0.012045 0.01876 0.026909 0.036455 0.04736
i 9 10 11 12 13 14 15 16
0.97531 0.96973 0.96364 0.95709 0.95009 0.94268 0.93489 0.92675
0.059575 0.07305 0.087725 0.10354 0.12042 0.1383 0.15711 0.17675
i 17 18 19 20 21 22 23 24
0.9183 0.90956 0.90059 0.89142 0.88208 0.87262 0.86308 0.8535
0.19715 0.21822 0.23987 0.26201 0.28454 0.30736 0.33038 0.3535
i 25 26 27 28 29 30 31 32
0.84392 0.83438 0.82492 0.81558 0.80641 0.79744 0.7887 0.78025
0.37662 0.39964 0.42246 0.44499 0.46713 0.48878 0.50985 0.53025
i 33 34 35 36 37 38 39 40
0.77211 0.76432 0.75691 0.74991 0.74336 0.73727 0.73169 0.72663
0.54989 0.5687 0.58658 0.60346 0.61928 0.63395 0.64742 0.65964
i 41 42 43 44 45 46 47 48
0.72211 0.71815 0.71477 0.71199 0.70981 0.70825 0.70731 0.707
0.67054 0.68009 0.68824 0.69495 0.70021 0.70398 0.70624 0.707
根据数字化调制框图(3.5),下面需要考虑的是如何把得到的来自两支路的I Q 经过同相和正交,再把所得的数值相加得到π/4QPSK信号。π/4QPSK调制信号计算公式如下:
,i=1、2、… …16 (3.8)
普通的周期载波调制算法完成一点的载波调制就要用两次乘法和一次加法运算,而在数字化调制过程中则是采用数据的调用来实现,不需要做乘法运算。对每个正弦、余弦波周期中取16个点:0, , ,… …, 进行载波调制。
在上述过程中又要调用余弦函数bc(i):
,i=1、2、… …16 (3.9)
列出函数调用表3.8以及函数调用图3.7如下:
表3.7 余弦函数 调用表
i 1 2 3 4 5 6 7
bc(i) 0.38268 0.70711 0.92388 1 0.92388 0.70711 0.38268
i 8 9 10 11 12 13 14
bc(i) 1.2246e-016 -0.38268 -0.70711 -0.92388 -0.92388 -0.70711 -0.38268
i 15 16
bc(i) -2.4493e-016 0.38268
图3.8 余弦函数 调用图
然后再得出正弦函数调用表3.8以及函数调用图3.8如下
表3.8 正弦函数 调用表
i 1 2 3 4 5 6 7
d 0.92388 0.70711 0.38268 6.1232e-017 -0.38268 -0.70711 -0.92388
i 8 9 10 11 12 13 14
d -1 -0.92388 -0.70711 -0.38268 -1.837e-016 0.38268 0.70711
i 15 16
d 1 0.92388
图3.9 正弦函数 调用图
由式(3.8)可知载波调制不需要做乘法运算。即是第1采样点的输出为0.38268 +0.92388 ,第2个采样点的输出为0.70711 +0.70711 ,… …,第48个采样点的输出为0.38268 +0.92388 ,如此循环。在过渡区内共有三个载波周期,共需采样16×3=48个点,可一次根据式(3.12)求出48个采样值,从而得到所需的过渡区的π/4QPSK信号的波形。
另外也对(3.9)式做如下处理,分为求出合矢量的幅值和相位偏移量来求所需的过渡区的π/4QPSK信号的波形。首先得到合矢量的幅值为:
(3.10)
相位偏移量为: ,归一化相位偏移量为:
于是采样点i的值为: ,在算法中 需要用BC表,数据要经插值运算才能得到,比如 。归一化相位以32为模,比如 。码元相位跳变为 的合向量幅值为: …… 。码元相位跳变为 的归一化相位偏移量为: …… ,那么输出的 就是π/4QPSK信号各个采样点的值。
(2)码元相位跳变为
设载波峰值为1,前一码元的矢量相位为0,则本码元适量相位为 。可得相位跳变为 时,即从(1,0)跳到(-0.707,0.707),过渡区采用余弦函数过渡,信号矢量变化过程如图3.3所示:
图3.9 信号矢量变化过程
对于过渡区第i个采样点,I 和Q 值分别为:
, i=1、2、……48 (3.11)
, i=1 、2、……48 (3.12)
在求 和 过程中同样要不断调用余弦函数c(i),也可以列出波形成形后出
和 ,如表3.9:
表3.9 输出 和 的调用表
i 1 2 3 4 5 6 7 8
0.99817 0.9927 0.9836 0.97092 0.9547 0.93503 0.91198 0.88565
0.00075687 0.0030242 0.0067924 0.012045 0.01876 0.026909 0.036455 0.04736
i 9 10 11 12 13 14 15 16
0.85616 0.82363 0.7882 0.75002 0.70925 0.66608 0.62068 0.57325
0.059575 0.07305 0.087725 0.10354 0.12042 0.1383 0.15711 0.17675
i 17 18 19 20 21 22 23 24
0.52399 0.47312 0.42085 0.3674 0.31301 0.2579 0.20232 0.1465
0.19715 0.21822 0.23987 0.26201 0.28454 0.30736 0.33038 0.3535
i 25 26 27 28 29 30 31 32
I
0.090678 0.035096 -0.02001 -0.074402 -0.12785 -0.18012 -0.23099 -0.28025
0.37662 0.39964 0.42246 0.44499 0.46713 0.48878 0.50985 0.53025
i 33 34 35 36 37 38 39 40
-0.32768 -0.37308 -0.41625 -0.45702 -0.4952 -0.53063 -0.56316 -0.59265
0.54989 0.5687 0.58658 0.60346 0.61928 0.63395 0.64742 0.65964
i 41 42 43 44 45 46 47 48
-0.61898 -0.64203 -0.6617 -0.67792 -0.6906 -0.6997 -0.70517 -0.707
0.67054 0.68009 0.68824 0.69495 0.70021 0.70398 0.70624 0.707
然后用同样的方法产生所需要的π/4QPSK信号。
(3)码元相位跳变为-
设载波峰值为1,前一码元的矢量相位为0,则本码元矢量相位为- ,即从
(1, 0)跳到(0.707,-0.707),过渡区采用余弦函数过渡,信号矢量变化过程如图3.10:
图3.10 信号矢量变化过程
一个码元要采样48个点,对于过渡区内的第i个采样点,I 和Q 值分别为:
, i=1、2、……48 (3.13)
, i=1、2、……48 (3.14)
在求所需要的π/4QPSK信号时,同样要调用上面提到的两个函数。
(4)码元相位跳变为-3
设载波峰值为1,前一码元的矢量相位为0,则本码元矢量相位为-3 ,即从(1,0)跳到(-0.707,-0.707),过渡区采用余弦函数过渡,信号矢量变化过程如图:
3.3 信号矢量变化过程
一个码元的过渡区共要采样48个点,对于过渡区内的第i个采样点,I 和Q 值分别为:
, i=1、2、……48 (3.15)
, i=1、2、……48 (3.16)
在求所需要的π/4QPSK信号时,同样要调用上面提到的两个函数。
再来考虑稳定区的情况,不妨先讨论初相θ =0时,可以列出下相位偏移量、I Q 与输入数据的关系,如图3.10所示,观察表达式的特征。
表3.10 相位偏移量、I Q 与数据之间的对应关系
数 据 Δθ θ =θ +Δθ
(I ,Q )
00
(-0.707,-0.707)
11
(0,-1)
01
(0.707,0.707)
10
¬¬0 (1,0)
… … … … … … … …
通过上表可以求出:
当码元为00时,
,其中i=1、2、3…16; (3.17)
当码元为11时,
, 其中i=1、2、3…16; (3.18)
当码元为01时,
,其中i=1、2、3…16; (3.19)
当码元为10时,
,其中i=1、2、3…16。 (3.20)
通过计算可以得到,(3.5)~(3.8)均是余弦函数,对于稳定区内的波形,可知应该是余弦波。有了输入码元以及初始相位就可以很容易的求出波形成形后的I 和Q ,然后就是对周期载波进行16点采样,由于码元稳定区的I 和Q 是恒定的,因此求输出π/4QPSK信号的波形相对于过渡区要容易得多。稳定区共有7个周期载波,则共需要采样112个点,求出一个周期的16个采样值就可以了。
需要调用表(3.7)和表(3.8),再结合式3.12,先拿式(3.5)来加以说明如何得到采样值的,由于初相位为0 ,当输入码元为00时,可求出本码元的绝对相位是 ,通过表(3.4)可以求出当前波形成形I 和Q 为(-0.707,-0.707),可以得到式(3.17)
不断的调用就可以得到所求的采样值,不需要做乘法运算。即是第1个点输出为(-0.707)×0.38268+(-0.707)×0.92388,第2个采样点的输出为(-0.707)×0.70711+(-0.707)×0.70711,… …,第16个采样点的输出为(-0.707)×0.38268+(-0.707)×0.92388,然后由于是周期载波,其他6个周期的采样值与第一个周期的是相同的。也就得到了稳定区的信号输出。
再仔细观察(3.17)式可以得到:
由表(3.3)可知,码元00的偏移量编号为5,则可想到上式可表示成
=bc(N +i),其中i=1,2,… …112, N 是码元过渡区结束时采样点的相位偏移量量,bc(i)函数上面已经介绍过。
以上分析都是以初相位是0时的情况,当前一码元的矢量相位不是0时,上述算法仍然正确。此处假设前码元相位为0,只是为了叙述更加直观方便。在实际实现过程中初相位可以是八种情况中的任意一种。
上面分别介绍了求码元稳定区调制算法和过渡区的调制算法。数字化调制生成
π/4QPSK信号就有许多的优点,码元经过映射逻辑后不需要通过低通滤波器来进行波形成形,而是根据输入数据流与相位偏移量的关系得到矢量号,得到I 和Q ,这样就大大减少由滤波器引起的计算量。得到了I 和Q 后,该调制算法通过调用函数来实现周期载波的采样。另外,该算法还解决了在码元过渡区相位跳变的问题,使用余弦函数实现平滑过渡,这样得到的信号的高频分量很少,频谱性能更好。
第四章 π/4QPSK信号数字化调制的仿真
4.1 MATLAB简介
MATLAB是矩阵实验室(Matrix Laboratory)之意,除具备卓越的数值计算能力外,它还提供了专业水平的符号计算,文字处理,可视化建模仿真和实时控制等功能。它的基本数据单位是矩阵,它的指令表达式与数学,工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完全相同的事情简捷得多. 当前流行的MATLAB 5.3/Simulink 3.0包括拥有数百个内部函数的主包和三十几种工具包(Toolbox).工具包又可以分为功能性工具包和学科工具包.功能工具包用来扩充MATLAB的符号计算,可视化建模仿真,文字处理及实时控制等功能.学科工具包是专业性比较强的工具包,控制工具包,信号处理工具包,通信工具包等都属于此类. 开放性使MATLAB广受用户欢迎.除内部函数外,所有MATLAB主包文件和各种工具包都是可读可修改的文件,用户通过对源程序的修改或加入自己编写程序构造新的专用工具包.
在70年代中期,Cleve Moler博士和其同事在美国国家科学基金的资助下开发了调用EISPACK和LINPACK的FORTRAN子程序库.EISPACK是特征值求解的FOETRAN程序库,LINPACK是解线性方程的程序库.在当时,这两个程序库代表矩阵运算的最高水平. 到70年代后期,身为美国New Mexico大学计算机系系主任的Cleve Moler,在给学生讲授线性代数课程时,想教学生使用EISPACK和LINPACK程序库,但他发现学生用FORTRAN编写接口程序很费时间,于是他开始自己动手,利用业余时间为学生编写EISPACK和LINPACK的接口程序.Cleve Moler给这个接口程序取名为MATLAB,该名为矩阵(matrix)和实验室(laboratory)两个英文单词的前三个字母的组合.在以后的数年里,MATLAB在多所大学里作为教学辅助软件使用,并作为面向大众的免费软件广为流传. 1983年春天,Cleve Moler到Standford大学讲学,MATLAB深深地吸引了工程师John Little John Little敏锐地觉察到MATLAB在工程领域的广阔前景.同年,他和Cleve Moler Steve Bangert一起,用C语言开发了第二代专业版.这一代的MATLAB语言同时具备了数值计算和数据图示化的功能. 1984年,Cleve Moler和John Little成立了Math Works公司,正式把MATLAB推向市场,并继续进行MATLAB的研究和开发. 在当今30多个数学类科技应用软件中,就软件数学处理的原始内核而言,可分为两大类.一类是数值计算型软件,如MATLAB Xmath Gauss等,这类软件长于数值计算,对处理大批数据效率高;另一类是数学分析型软件 Mathematica Maple等,这类软件以符号计算见长,能给出解析解和任意精确解,其缺点是处理大量数据时效率较低.MathWorks公司顺应多功能需求之潮流,在其卓越数值计算和图示能力的基础上,又率先在专业水平上开拓了其符号计算,文字处理,可视化建模和实时控制能力,开发了适合多学科,多部门要求的新一代科技应用软件MATLAB.经过多年的国际竞争,MATLAB以经占据了数值软件市场的主导地位. 在MATLAB进入市场前,国际上的许多软件包都是直接以FORTRANC语言等编程语言开发的。这种软件的缺点是使用面窄,接口简陋,程序结构不开放以及没有标准的基库,很难适应各学科的最新发展,因而很难推广。MATLAB的出现,为各国科学家开发学科软件提供了新的基础。在MATLAB问世不久的80年代中期,原先控制领域里的一些软件包纷纷被淘汰或在MATLAB上重建。MathWorks公司1993年推出了MATLAB 4.0版,1995年推出4.2C版(for win3.X)1997年推出5.0版。1999年推出5.3版。MATLAB 5.X较MATLAB 4.X无论是界面还是内容都有长足的进展,其帮助信息采用超文本格式和PDF格式,在Netscape 3.0或IE 4.0及以上版本,Acrobat Reader中可以方便地浏览。 时至今日,经过MathWorks公司的不断完善,MATLAB已经发展成为适合多学科,多种工作平台的功能强大的大型软件。在国外,MATLAB已经经受了多年考验。在欧美等高校,MATLAB已经成为线性代数,自动控制理论,数理统计,数字信号处理,时间序列分析,动态系统仿真等高级课程的基本教学工具;成为攻读学位的大学生,硕士生,博士生必须掌握的基本技能。在设计研究单位和工业部门,MATLAB被广泛用于科学研究和解决各种具体问题。在国内,特别是工程界,MATLAB一定会盛行起来。可以说,无论你从事工程方面的哪个学科,都能在MATLAB里找到合适的功能。 介绍一下MATLAB的主要特点:
1. 语言简洁紧凑,使用方便灵活,库函数极其丰富。MATLAB程序书写形式自由,利用起丰富的库函数避开繁杂的子程序编程任务,压缩了一切不必要的编程工作。由于库函数都由本领域的专家编写,用户不必担心函数的可靠性。可以说,用MATLAB进行科技开发是站在专家的肩膀上。
2. 运算符丰富。由于MATLAB是用C语言编写的,MATLAB提供了和C语言几乎一样多的运算符,灵活使用MATLAB的运算符将使程序变得极为简短。
3. MATLAB既具有结构化的控制语句(如for循环,while循环,break语句和if语句),又有面向对象编程的特性。
4. 程序限制不严格,程序设计自由度大。例如,在MATLAB里,用户无需对矩阵预定义就可使用。
5. 程序的可移植性很好,基本上不做修改就可以在各种型号的计算机和操作系统上运行。
6. MATLAB的图形功能强大。在FORTRAN和C语言里,绘图都很不容易,但在MATLAB里,数据的可视化非常简单。MATLAB还具有较强的编辑图形界面的能力。
7. MATLAB的缺点是,它和其他高级程序相比,程序的执行速度较慢。由于MATLAB的程序不用编译等预处理,也不生成可执行文件,程序为解释执行,所以速度较慢。
8. 功能强大的工具箱是MATLAB的另一特色。MATLAB包含两个部分:核心部分和各种可选的工具箱。核心部分中有数百个核心内部函数。其工具箱又分为两类:功能性工具箱和学科性工具箱。功能性工具箱主要用来扩充其符号计算功能,图示建模仿真功能,文字处理功能以及与硬件实时交互功能。功能性工具箱用于多种学科。而学科性工具箱是专业性比较强的,如control, toolbox, signal processing toolbox, communication toolbox等。这些工具箱都是由该领域内学术水平很高的专家编写的,所以用户无需编写自己学科范围内的基础程序,而直接进行高,精,尖的研究。
9. 源程序的开放性。开放性也许是MATLAB最受人们欢迎的特点。除内部函数以外,所有MATLAB的核心文件和工具箱文件都是可读可改的源文件,用户可通过对源文件的修改以及加入自己的文件构成新的工具箱。
4.2 π/4QPSK信号数字化调制MATLAB实现分析
4.2.1 数字化调制MATLAB实现框图
图4.1数字化调制MATLAB实现框图
4.2.2 MATLAB编码解析
首先生成算法中的参数表,分别是过渡区时的余弦调用函数c(i),求采样值时的周期为16个正弦调用函数d(i)和余弦调用函数bc(i),
for i=1:49
c(i)=cos(i*pi/48);
end
for i=1:17
d(i)=sin(i*pi/8);
end
for i=1:17
bc(i)=cos(i*pi/8);
end
生成一组随机序列x=[0011011000101110],再定义几组变量I,Q,I1,Q1,其中I,Q,I1,Q1是码元过渡区算法中的变量(分别为 和 );k1,k2定义为合矢量幅值;t1,t2定义为相位偏移量;x1,x2定义为相位偏移量归一化。
在算法中每个码元要采样16个点,而一个码元有十个载波周期,因此可能会出现角度不为整数,定义bc(i),for i=1:17 bc(i)=cos(i*pi/8),再对过渡区的矢量进行定义,对于过渡区的48个采样点,要分相位偏移量为 和 两种情况分析,因此变量表达式的说明也要分两种情况,如下:
I(i)=((1+0.707)/2)+((1-0.707)/2)*cos(pi*i/48);
Q(i)=0.707/2-0.707/2*cos(pi*i/48); %码元过渡区的算法(相位偏移量为pi/4)
k1(i)=sqrt(I(i).^2+Q(i).^2); %矢量的幅值
t1(i)=atan(Q(i)/I(i)); %相位偏移量
x1(i)=t1(i)*8/pi; %归一化的相位偏移量
I1(i)=(1-0.707)/2+(1+0.707)/2*cos(pi*i/48);
%码元切换区的算法(相位偏移量为3*pi/4)
Q1(i)=0.707/2-0.707/2*cos(pi*i/48);
k2(i)=sqrt(I1(i).^2+(Q1(i).^2));
由前一个相位和相位偏移量决定本码元矢量号,而相位偏移量决定于输入码元数据,码元矢量号最终能求出I(k),Q(k),再使用a=bc(S+1),s=[s a],最终求出输出信号s。由于数据流有00,01,10,11四种码元类型,因此要分四种情况进行讨论,其中用于求本码元的是S=mod(S+N,16),N=1,3,5,7
当输入码元为00时,可得:
temp=mod(S0+j+x1(j),16);
y(j)=floor(temp);
n(j)=bc(floor(temp)+1)+(bc(floor(temp)+2)-bc(floor(temp)+1))*(temp-floor(temp)); %
a=k1(j)*n(j);
s=[s a];
S=temp;
即可以得到码元为00时所得波形s。
然后再是输入码元为01时,可得:
temp=mod(S0+j+x2(j),16); n(j)=bc(floor(temp)+1)+(bc(floor(temp)+2)-bc(floor(temp)+1))*(temp-floor(temp));
a=k2(j)*n(j);
s=[s a];
S=temp;
即可得到码元为01时的所得波形s。
当输入码元为10时,可得:
temp=mod(S0+j-x2(j),16);
n(j)=bc(floor(temp)+1)+(bc(floor(temp)+2)-bc(floor(temp)+1))*(temp-floor(temp));
a=k2(j)*n(j);
s=[s a];
S=temp;
即可得到码元为10时的所得波形s。
当输入码元为11时,可得:
temp=mod(S0+j-x1(j),16);
n(j)=bc(floor(temp)+1)+(bc(floor(temp)+2)-bc(floor(temp)+1))*(temp-floor(temp));
a=k1(j)*n(j);
s=[s a];
S=temp;
即可得到码元为11时的所得波形s。
再对稳定区采样,使用S=mod(S,16)求出本码元。
a=bc(S+1);
s=[s a];
end
S0=S;
最后在matlab中做出图形
figure(1)
plot(s);
最后进行数轴变换,使图像更加直观,把幅度值从1 1.5,-1 -1.5。
axis([0,800,-1.5,1.5])
titile(`具有典型性的π/4QPSK信号波形`)
回车即可得到具有典型性的π/4QPSK信号波形。
4.3 具有典型性的π/4QPSK信号波形
通过上面的程序就可以得到所要求的具有典型性的π/4QPSK信号波形,在设计中先假设输入的数据流为:”0011011000101110″,波形如下图4.2:
图4.2 具有典型性的π/4QPSK信号波形
当输入数据流为N=10000时,仍然可以得到如上图一样的波形。程序如下:
N=10000;
dsource=[ ];
for i=1:2*N;
temp=rand;
if(temp<0.5)
dsource(i)=0;
else
dsource(i)=1;
end;
end;
x=dsource;
4.4 π/4QPSK信号性能研究
首先对所得信号进行傅立叶变换,求出π/4QPSK信号电路实现的频率谱图,如图4.3所示:
图4.3 π/4QPSK信号电路实现的频率谱图
从图中可以看出,高频分量非常多。
再来做出数字化调制实现的频率谱图,如图4.4所示:
MATLAB程序是,在π/4QPSK信号电路实现波形的基础上再加上如下程序:
S=fft(s,512);
XS=abs(S);
figure(1)
plot(XS);
图4.4 数字化调制实现的频率谱图
具体MATLAB实现的程序如下:
S=fft(s,512);
XS=abs(S);
figure(1)
plot(XS);
从图中可以看出,数字化调制方式产生的波形的高频分量明显少于使用电路实现产生波形的高频分量,因此功率也明显要低于电路实现波形产生的功率。在π/4QPSK信号电路实现过程中要使用低通滤波器,并要进行两次乘法运算,从而产生了大量的高频分量,同时也大大增加了计算量。而使用数字化调制算法得到的信号,则不需要经过低通滤波器,其切换区使用余弦函数进行过渡,列出调用表,直接得出 ,这样做既能大量减少高频分量,又省去了使用滤波器时的很大的计算量。从图4.2,图4.3中可以很清楚地看出来。
4.5 其他数字化调制方式及其比较
在目前世界通信体系系统中,欧洲的GSM 系统采用的是MSK和GMSK调制,美国的CDMA系统采用的是QPSK和OQPSK调制,而PHS系统中采用π/4DQPSK调制,使用不同的调制技术,得出不同调制技术的特点和性能【17】。
MSK是一种恒定包络调制,它对放大器的动态范围要求低,且领道干扰小,具有高的功率效率,能使用C类放大器,设备也比较简单,但是它的频谱效率不及QPSK。所以它一般在中、低速的数据或语音传输中使用。QPSK是一种线性调制,发射信号幅度随调制信号改变。它有着较高的频谱效率,它的信号轨迹经过零点,且变化的幅度范围很大,包络波动大,这要求功率放大器的线性范围很大。OQPSK与QPSK有着相同的频谱效率。OQPSK解决了QPSK调制中信号轨迹经过零点且幅度变化大的这一缺点,因而具有更高的功率效率,可以使用线性范围较小的功率放大器,适合于体积小、功率小的移动站。π/4DQPSK与QPSK有着相同的频谱效率,π/4DQPSK解决了QPSK存在相位模糊的问题,并且使得时钟信号更易提取,达到快速同步。同时也降低了QPSK信号的包络波动,提高功率效率。但其性能在受到多径衰落、多普勒频移和其他形式的相位噪声干扰时会急剧下降。另外,需要提到的是,由于信息的传递是星座图中状态的改变,如果状态的改变非常快,将占用很宽的带宽。滤波器的功能就是使得这种变化减慢,平滑这些转换,从而提高系统的频谱效率,减小邻道干扰。
其中正交多载波调制(OFDM)就是一种新的调制技术。随着无线互联网的推出,WLAN的得到广泛应用。目前,WLAN主要采用802.11b标准,该标准的速率最高是11Mb,而在802.1la中,速率最高可达54Mb/s,其调制技术采用的就是OFDM(Orthogonal Frequency Division Multiplexing)。OFDM 中文含义是正交频分复用,是目前最复杂的一种调制技术,也是解决无线网络由于多径效应而导致的传输速率低的问题。传统频分多址(FDMA)是将频带分为若干不相交的频带来传输数据流,在接收端用一组滤波器来分离各信道,这种方法简单、直接,但是频谱利用率低,信道间要留有保护频带。OFDM则采用多个相互正交载波,一个信号内包含有整数载波周期,每个载波的频点都是和相邻载波零点重叠,这种载波间的部分重叠提高了频带利用率。OFDM中数据流被分解为若干个子数据流,再利用这些子数据流分别去调制若干个正交载波。由于多载波调制信道中,每个载波的数据传输速率相对较低,码元周期加长,只要多径效应带来的时延扩展与码元周期之比小于一定门限,就不会造成码间干扰。而且正交多载波的利用,使信道衰落引起的突发误码分散到不相关的子信道上,变为随机性误码,有效地减少和克服了码间干扰带来的影响。OFDM技术还采用了HOME PLUG技术,把所有并行子信号合并成一个独立信号传输,提高了传输速度。
选择哪一种调制技术是根据信道特性和应用来确定的。功率效率和频谱效率一般不能两全齐美。随着调制技在不断的发展,新的调制技术将可以带来更好的频谱效率和更高的功率效率。
第五章 毕业设计总结
5.1 设计遇到的问题和有待改进之处
在毕业设计的过程中,首先对毕业设计任务书做了认真分析,根据设计要求逐一进行了分析和研究,完成了任务书中要求的各项要求,设计过程进展顺利,但是也遇到过不少问题。首先是对数字化调制产生π/4QPSK信号算法的研究,由于通信原理课程已经学过近2年时间,尽管我研究生复试时再一次认真的学习了,可是我们书本上关于数字化调制的章节很少,讲的又很不详细,只是对什么是π/4QPSK和如何实现数字化调制做了初步的介绍,对具体的算法提到的很少,因此对数字化调制总体上刚开始认识时认识的是很不深刻的。为了弄清楚信号数字化调制以及π/4QPSK信号调制原理,我对樊昌信教授《通信原理》进行了又一次深入研究,并且从我们学校图书馆上收集大量π/4QPSK调制技术研究资料,数字化调制技术研究的资料以及各种调制技术性能比较和分析的资料,肖老师对我的毕业设计很关心,给我讲了好几次关于π/4QPSK数字化调制技术的原理,并且还给我了相关资料,给了我很大的信心,也促使我不断努力。第二个问题是如何使用MATLAB编写程序产生具有典型性的π/4QPSK信号波形,以及对通过电路实现的波形和通过数字化调制产生的波形的性能进行分析,主要是对它们的频率谱进行分析和比较,当然这也需要用MATLAB仿真演示出来,证明论文所采用的数字化调制方式确实很优越。虽然说MATLAB在当今是应用非常广泛的工具,但是我们只是在数字信号处理中对其有个初步的接触,并没有深入学习和研究。因此我花费了很大的精力,去了图书馆好几次,也借了几本书,刚开始学习时很是郁闷,最后找老师和学姐指点了一下,再加上我研究生期间应该会再次使用它,因此也值得去努力,总算学会了MATLAB编程,最后成功的编出了MATLAB源代码,并且看到我所需要的波形图。
设计中同样存在很多不足之处,由于计算机处理速度的限制,我没有仿真出N=10000时的π/4QPSK信号的波形,在对电路实现调制技术和数字化调制技术性能分析上也只是对高频分量进行了说明,而没有使用具体数据证明。
5.2 收获和心得
回顾四个多月的毕业设计,在学习方法、逻辑思维、知识汇总等各方面都有很大的进步,分析问题和解决问题的能力也得到了很大的提高,实践和动手能力也得到了进一步的增强。
(1)在理论的学习中,紧密联系以前学过的知识,融会贯通,掌握循序渐进的学习方法,结合通信原理、数字通信原理及MATLAB等课程的知识,通过认真研究QPSK信号和π/4QPSK信号特性,π/4QPSK电路实现调制原理和数字化调制原理以及MATLAB仿真实现波形。每一件事都非常认真,充分运用了大四下学期的宝贵时间,对过去三年多所学的只是进行了全面的汇总,为今后的研究生学习和工作奠定了坚实的专业技术基础。
(2)在设计过程中,同样十分注重原理的实际应用,积极培养动手实践能力、分析解决问题的能力。在设计的每一部分,首先必须十分熟悉任务书上要求实现的功能,要力求用最简单的语言表达出数字化调制的原理,这就需要对原理有较深的认识,对知识的融会贯通,同时通过性能的分析和原理的现实应用反过来加深对原理的理解。除此之外,还认真学习了MATLAB仿真语言,实现了使用具体仿真波形说明数字化调制性能确实优越性,因此加强了动手能力。














 工商网监
工商网监
评论