 电子发烧友App
电子发烧友App


作者:Wofle Yu
前言
随着大数据、云计算和物联网时代的到来,通信系统从集中式系统向分布式系统发展,在集中式系统中,所有进程或模块都从系统唯一的全局时钟中获取时间,系统内任何两个事件都有着明确的先后关系。
在分布式系统中,系统无法为彼此间相互独立的模块提供一个统一的全局时钟。由于这些本地时钟的计时速率、运行环境不一致,因此,在一段时间后,这些本地时钟也会出现不一致。为了让这些本地时钟再次达到相同的时间值,必须进行时间同步操作。
技术型授权代理商Excelpoint世健公司的工程师Wolfe Yu,就5G通信时钟同步的相关知识进行了解读。
时钟同步技术
系统中各时钟的同步,需要对比各时钟与系统标准时钟的差值,以及对相对漂移做修正处理。比如,在GPS导航系统用户设备中,我们一般通过调整1PPS信号前沿出现时刻,来做时钟同步。还有一种就是通过以太网的时钟恢复技术来做时钟同步,这个技术称为同步以太技术,或者SyncE。当然,还有其他一些技术,比如通过无线电波来传播时间信息,不过这些传输方式只能实现同频传输。
为了达到更高精度要求,有人提出了一种PTP的传输方式。后来,随着5G技术的不断提高,又提出采用SyncE+PTP相结合的方式。

GPS时钟同步
GPS同步三维坐标理论
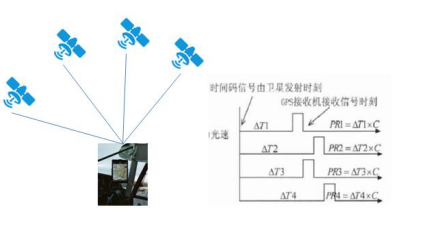
GPS系统,利用工作卫星确定接收机三维坐标,得到接收机的时钟偏差,来进行授时。理论上来说,只要接收到4颗或者4颗以上工作卫星,通过空间三维坐标公式,就可以准确地对其进行定位和授时,其坐标理论如下图,具体推导过程不赘述。
GPS高稳频综器系统原理
2004年, Nicholls和Carleton提出了著名的N/C系统,N/C系统的核心技术是利用10MHz的OCXO同时接入一个分频器和一个倍频器,分别产生1pps和160MHz的信号,利用锁相环,实时校正OCXO的输出频率。
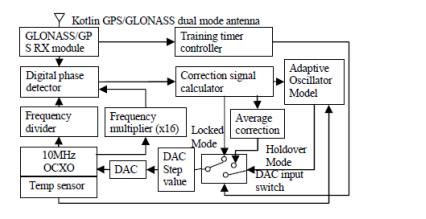
为了便于直观分析,我们重构系统,GPS接收机产生1PPS输出信号,和OCXO产生的10MHz分频输出1PPS信号,再通过10MHz倍频160MHz的信号检测相位偏移量,实现同步。
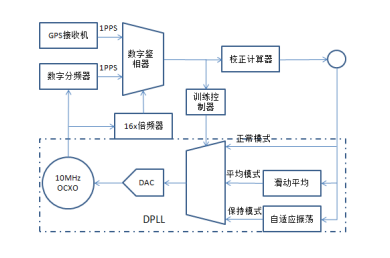
同步的本质,就是通过锁相环来调整频率和相位,数字锁相环DPLL对数字电路噪声容忍能力强、捕获时间快、易于集成、可以提供复杂的处理算法。
数字锁相环主要包括鉴相器、数字环路滤波、相位累加器、DA转换等。鉴相器把本地估算信号和输入信号做相位比较,产生对应相位误差序列,经过环路滤波,产生相位控制字,调节相位,同时,频率控制字调整频率输出。
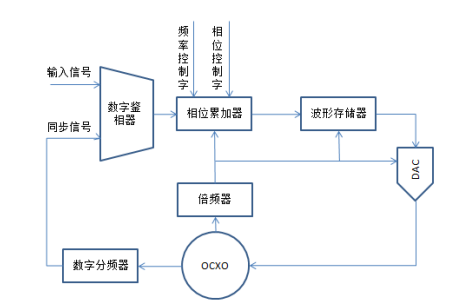
目前,大多数锁相环采用一种基于DDS+PLL的结构,通过分别计算频率控制字和相位控制字做调整,来实现快速锁定相位和频率。
SyncE时钟同步
SyncE(同步以太网)架构
同步以太网技术,是一种采用以太网链路码流恢复时钟频率的技术,简称SyncE,在以太网源端使用高精度时钟,利用现有的以太网物理层接口PHY发送数据,在接收端通过CDR恢复并提取该时钟频率,保持高精度时钟性能,SyncE技术框图如下:
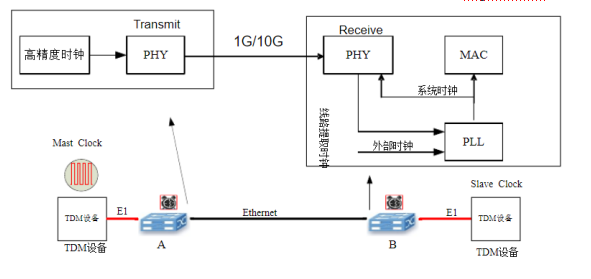
CDR(时钟数据恢复)基本原理
以太网PHY层传输NRZ码流,在传输侧,对码流重新编码成4B/5B、8B/10B、64B/66B码,通过CDR(时钟数据恢复)可以完成时钟和数据恢复。
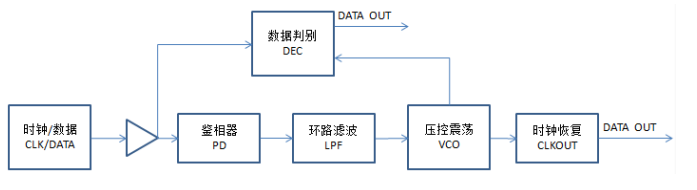
CDR原理大致如下:鉴频环Coarse Loop完成频率捕获,鉴相环Fine Loop调整相位和恢复时钟关系,恢复数据信号。
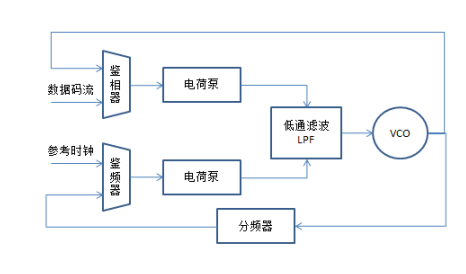
CDR电路主要分为:
- 双环结构CDR、 由锁相环和延迟锁相环组成,锁相环提供所需频率的低抖动正交时钟,锁相环将正交时钟的相位调整为最佳采样相位;
- 全数字化CDR、此电路采用全数字电路通过过采样法实现,功耗较低,但精度有限;
- 还有一种无参考时钟CDR、此电路不需要提供片外参考时钟,应用灵活,但工作频率范围较小。
SyncE在时钟同步中,表现出了非常出色的频率跟踪作用,但是SyncE在时钟传输中无法判断时钟信号在线路上的传输延时。
精确时间协议PTP(Precision time protocol)演进
网络时间同步协议NTP(Network time protocol)理论
PTP是由NTP演变过来的,我们先谈谈NTP网络协议,从时钟向主时钟发送一个消息包,记录发出消息包的从时间戳T1,主时钟收到消息包立即记录主时间戳T2,同时,主时钟向从时钟返回一个带主时钟时间戳T3的消息包,从时钟收到返回消息包后,立刻记录下从时钟的时间戳T4。
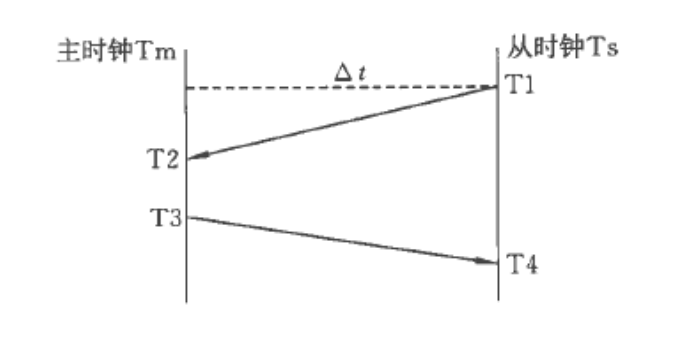
同时,我们假定双向路径对称,即主到从或者从到主所用时间一致。基于以上,我们可以很轻松得出双向路径的传送时间。
缺点:纯软件计算时间,需要组织报文传输,需要多次校准,报文传输存在不对称,延时等可能,所以精度不高。
精确时间协议PTP(Precision time protocol)理论
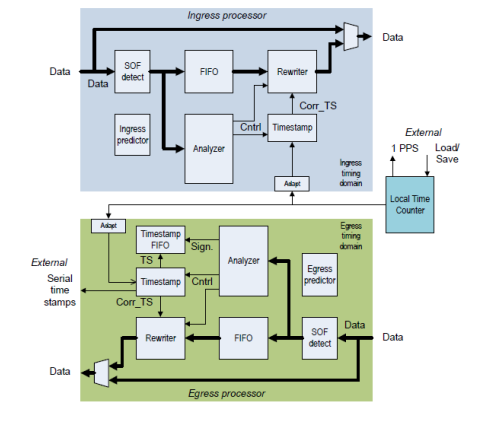
IEEE 1588 PTP协议是在NTP协议基础上做了一些优化,在硬件上要求每个网络节点必须有一个包含实时时钟的网络接口卡来满足时间戳要求。
IEEE 1588网络时钟主要分成普通时钟OC(Ordinary clock)、边界时钟BC(Boundary clock),只有一个PTP通信端口的时钟是普通时钟,有多个PTP通信端口的时钟是边界时钟,每个PTP端口独立通信。理论上来说,我们首先确定一个最优的时钟作为该网主时钟。PTP通过时戳单元(TSU)来标记主从时钟时间戳,TSU同时监测输入输出数据流,当识别到IEEE 1588 PTP数据包的前导码时发布一个时间戳,用于精确标记PTP时间数据包的到达或者离开时间。
PTP协议基于纯软件同步数据包传输,PTP通信报文主要分为:同步报文Sync,跟随报文Follow_up(备注:Follow_up message不是必须的,部分模式不需要,例如one-step模式),延迟请求报文Delay_Req,延迟应答报文Delay_Resp和管理报文。
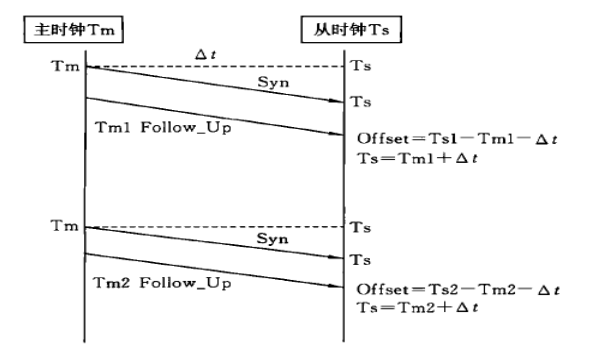
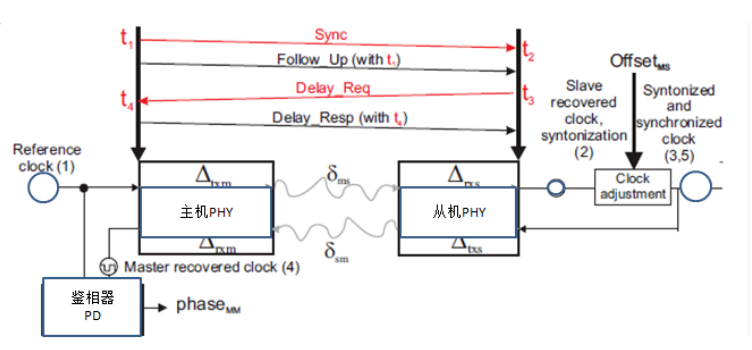
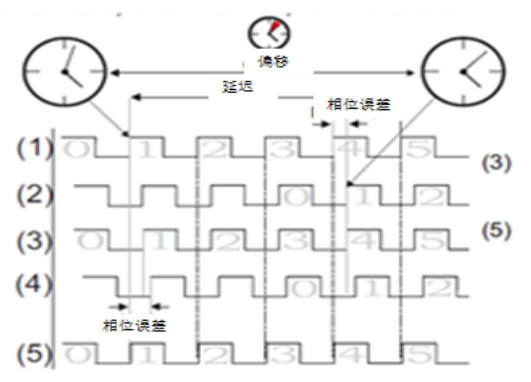
IEEE 1588 PTP协议时间偏差修正:
- 主时钟向从时钟发送Sync报文,并记录发送时间tm1,同时启动定时器,从时钟收到该报文后,记录接收时间ts1;
- 主时钟接着发送携带tm1的Follow_up报文;
- 通过以上两条信息,计算偏移时间Offset;
- 间隔时间主时钟向从时钟发送第二条Sync报文,并记录发送时间tm2,从时钟收到该报文后,记录接收时间ts2;
- 主时钟接着发送携带tm2的Follow_up报文;
- 通过以上偏移时间Offset,修正ts时间。
基于以上步奏,修正ts时间与tm时间一致。
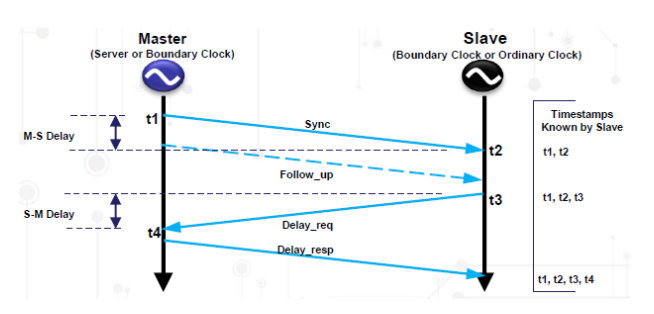
IEEE 1588 PTP协议延迟计算:
- 主时钟向从时钟发送Sync报文,并记录发送时间t1,从时钟收到该报文后,记录接收时间t2;
- 主时钟接着发送携带t1的Follow_up报文;
- 从时钟向主时钟发送Delay_req报文,用于发起反向传输延时的计算,并记录发送时间t3,主时钟收到该报文后,记录接收时间t4;
- 主时钟收到Delay_req报文之后,回复一个携带有t4的Delay_resp报文。
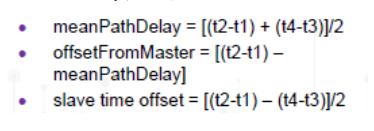
基于以上4个时间戳,由此可以计算出各时间延迟。
SyncE+PTP理论
IEEE 1588 PTP同步最基本的应用前提就是必须建立在上下行链路时钟频率严格一致的基础上,如果上下行链路时钟不一直,那么时间同步的精度就会大打折扣。
利用SyncE,从设备通过以太网获取主时钟频率,恢复出精准的时钟频率,协助PTP来实现相位对齐及时间同步。
Microchip解决方案
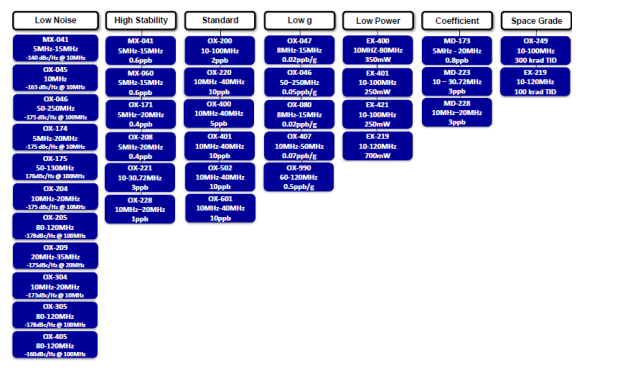
Excelpoint世健的工程师Wolfe Yu介绍:世健代理的Microchip旗下拥有Zarlink、Maxim Timing & Sync BU、Micrel、Vectron、Vitesse、Actel等近60年历史的完整时钟方案提供商,可以给用户提供交钥匙方案。
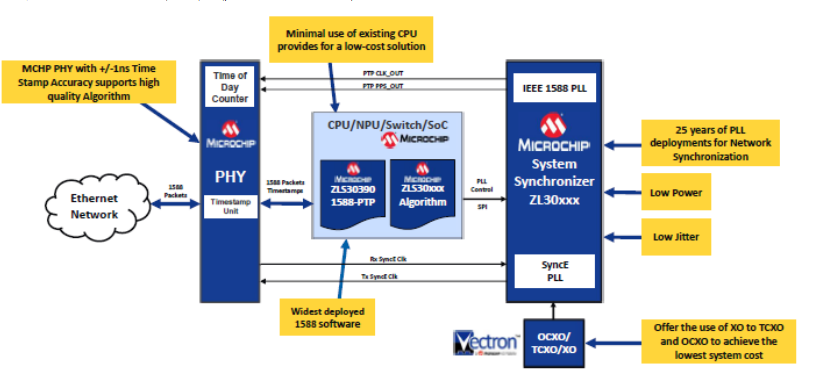
SyncE & IEEE 1588
Microchip多种时间解决方案,产品涵盖GPS、SyncE以及IEEE1588混合集中式系统以及精确时间系统,可以满足高中低档不同组合的产品需求。
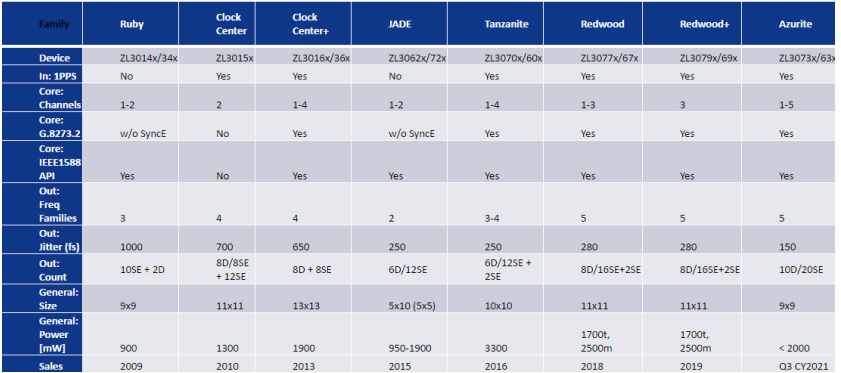
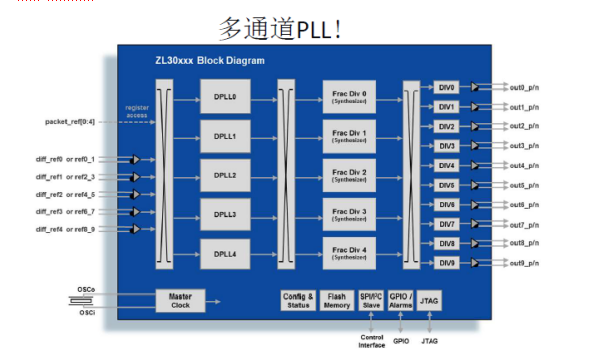
ZL30735主要特点
多达5路独立通道DPLL;
3路NCO、分离XO、备用时钟模式混合通道DPLL;
多通道Frac_N输出分频器;
每个通道支持任何频率转换;
多达10通道差分或者单端输入,10通道差分或者20通道CMOS输出;
满足ITU-T G.8262, G.8262.1, G.813, G.812, Telcordia GR-1244, GR-253;
满足ITU-T G.8261, G.8263, G.8273.2 (class A,B,C,D), G.8273.4;
嵌入式PPS;
抖动性能小于150 fs rms。
OCXO
恒温晶体振荡器简称恒温晶振OCXO(Oven Controlled Crystal Oscillator),是利用恒温槽使晶体振荡器中石英晶体谐振器的温度来保持恒定。OCXO是由恒温槽控制电路和振荡器电路构成,通常人们是利用热敏电阻“电桥”构成的差动串联放大器,来实现温度控制。
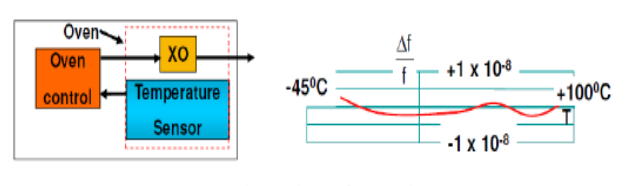
Microchip推出多种OCXO可以供客户选择,输出频率最高可达3GHz,温度稳定性可达0.15ppb,老化率可达20ppb。
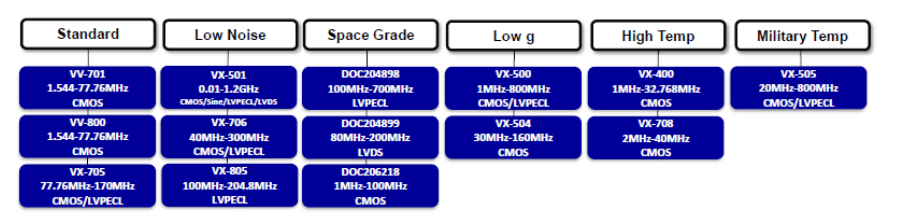
VCXO
压控振荡器指输出频率与输入控制电压有对应关系的振荡电路(VCO),频率是输入信号电压的函数的振荡器VCO,振荡器的工作状态或振荡回路的元件参数受输入控制电压的控制,就可构成一个压控振荡器。
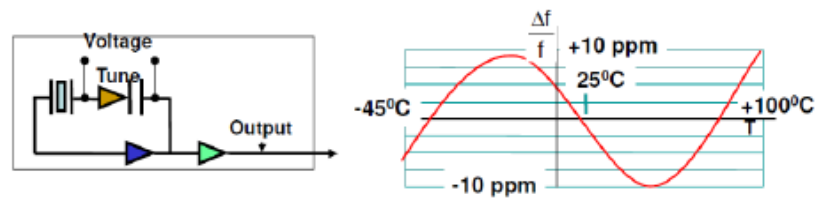
Microchip VCXO选型一览:
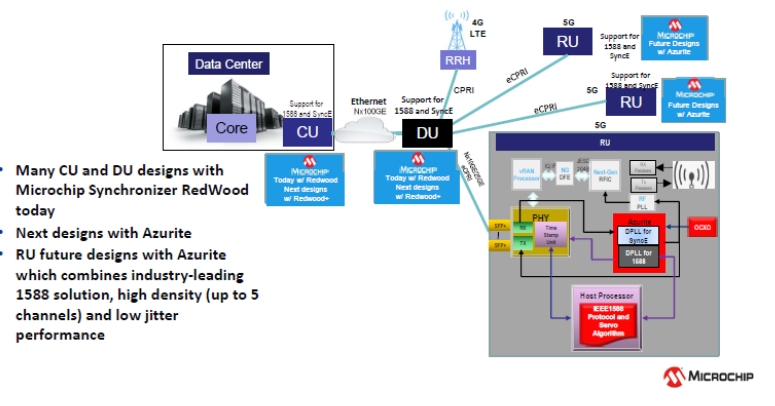
此外,Excelpoint世健可以提供基于Microchip集成IEEE1588、SyncE的PHY芯片和IP协议包的全套交钥匙完整方案,助力5G小基站DU、RU及HUB,缩短客户开发周期。










 工商网监
工商网监
评论