通过二维Gauss随机粗糙面的相关函数及其表面谱密度函数,应用Monte Carlo方法,建立了二维Gauss随机粗糙面模型,并采用均方根高度和相关长度对随机粗糙表面的高度起伏影响进行了特性分析,将
2010-05-28 13:41:10
本帖最后由 zgjlzc 于 2016-9-9 10:13 编辑
大神好,遇到一个二维图片清空的问题。如下图,点画圆,二维图片中根据半径画圆,最多画十个圆,点清空,图片清空,再点画圆,图片会出现没清空之前的十个圆。这是为什么啊,我想要的目标是,点清空后,再点画圆,会从0个开始画圆。
2016-09-09 09:53:48
二维声源定位算法仿真设计方案文中提出新的高精度, 快速二维声源定位算法。计算机采集四个声音传感器, 一个风速传感器和一个风向传感器的信号, 计算出声源的位置和当地的声速。用MatLab语言进行的仿真
2009-12-10 16:24:07
如图,如何得到二维数组滚动条的位置, 持续写入数据时,想让滚动条显示在最新数据的位置
2021-01-11 17:14:26
大家不要认为二维数组在内存中就是按行、列这样二维存储的,实际上,不管二维、三维数组… 都是编译器的语法糖。
存储上和一维数组没有本质区别,举个例子:
int array[3][3
2025-11-25 07:42:57
二维数组怎么转化为簇
2018-05-04 17:04:57
`想通过labview与QR相结合产生二维码,有没有做过的,分享分享经验啦`
2016-05-30 17:04:33
想用51做一个能将简单数字生成二维码图片在LED彩屏显示。问一下二维码的算法?51单片机能处理吗?请教高手了。
2014-03-30 20:14:04
`利用笔记本电脑的摄像头采集二维码图像并识别,显示二维码的信息!下载了labview视觉与运动模块的可以下来看看!里面有2张二维码,用二维码生成器做的(百度应用),用手机拍二维码然后运行程序,将手机靠近摄像头可识别出信息!`
2015-08-27 16:52:28
在二维码软件中,点击软件左侧的“二维码”按钮,在画布上绘制二维码样式,双击二维码,在图形属性-条码选项卡中,设置条码类型为Dot Code。 在选项卡中,点击“修改”按钮,删除默认的数据
2020-12-02 15:45:11
压缩域中的重建方法,指出了各自的优点与不足。研究表明,超分辨率重建具有广泛的应用前景,其成像模型、运动估计、重建算法和实时实现将是今后研究的重点。关键词:超分辨率! 图像重建! 压缩视频
2009-03-14 17:08:37
在许多电磁仿真应用中,导体厚度不是影响器件电性能的关键因素,并且去掉导体厚度还可以提高解决效率。今天小编就和大家聊聊HFSS二维薄片或面上的的边界设置应用技巧。首先,我们来看两个例子:一、贴片天线铺铜厚度的影响二维薄片和三维实物的仿真结果对比如下图:
2019-06-28 06:38:43
求助各大神,我手上有一个二维码实验想做做,但具体参数不会设。可以帮帮忙吗。二维码类型为DataMatrix.
2016-03-08 16:49:04
,还使用了接近探测功能(如在自动升降门操作中)。但是,这并不止于此。并排停放的汽车能以更高的分辨率利用这种技术,并在软件中构建三维模型。启发式算法(类似于PCB 自动布线)可以找到最佳方法,且伺服反馈
2019-07-08 06:59:19
大致等于波长比上天线长度。当距离给定时,工作在极短的波长或采用长的天线,又或者二者同时采用,就能获得高的方位分辨力。但是极短的波长面临的大气衰减会异常严重,另一方面机载雷达的天线又不可能做的太长。为了摆脱这个困境,合成孔径雷达(SAR)应运而生。
</span>
2023-08-16 09:42:23
本帖最后由 bee825 于 2016-6-15 10:52 编辑
这是一篇关于ZoomFFT算法基本原理及其应用介绍的文章,可以用于24GHZ微波雷达算法中,频谱局部细化,提高分辨率。希望能对大家有所参考帮助,感兴趣的朋友可以加我企鹅号274001657,一起交流更多关于雷达技术的事情。
2016-06-15 10:30:08
各位大佬,esp_box 显示二维码花屏,这个怎么解决呢,看配置一键选择了二维码了。
2023-03-09 08:17:04
一个二维数组分别和50个二维数组算距离,得出距离最小值,并输出距离最小的是第几个二维数组,应该要怎么实现呢?
2018-04-18 19:59:37
两二维数组,数组每个元素又包含3个元素,将两数组比较找出一个和另一个相同或接近的元素,用labview求程序或者算法。另外一个二维数组,找出相同的元素并删除,并显示新的数组,用labview求程序或者算法。我是新手,大家多多帮忙!
2012-05-04 17:25:46
本帖最后由 没有彼岸旳海 于 2017-12-20 21:36 编辑
自己摸索编写的程序,由于最近在做项目,发现使用labview自带的OCR读取数据不稳定,二维码稍微有些脏污就不能识别,所以就是用了Halcon算法库来进行二维码的识别。附件是程序代码,高手勿喷,谢谢!
2017-11-26 22:36:07
labview用了index Array按索引一行行读取二维数组之后想再按读取顺序重新组成一个二维数组如何实现,即第一次读取的作为第一行,第二次读取的作为第二行以此类推
2024-10-25 21:06:41
labview如何将一维数组写入二维空数组某列或某行
2011-12-27 17:04:55
基于二维图像的FFT算法实现matlab程序,FFT函数源代码
2014-05-15 14:22:01
本文提出另一种方法,在二维平面上只需使用4个参考标签及2个远距RFID读取器,即可实现二维室内定位,大大降低了硬件成本并弥补了GPS只能进行室外定位的不足。
2021-05-21 06:42:06
基于STM32的二维码识别源码+二维码解码库lib,推荐下载!
2025-05-28 22:04:41
主要区别:2、制作效率不同:由于制作流程不同而造成的。a. 二维动画制作:因为二维动画制作不需要制作模型、绘制贴图和设置材质灯光,准备工序相对较少,但是后续的制作工作需要人工完成。因此,二维动画制作制作
2022-01-25 10:34:36
`怎么按列、行求得二维数组的均值啊`
2013-09-06 12:45:46
我最近在学FPGA,想实现MIMO的雷达成像,请问EP4可以做吗?或者什么板子可以做呢。
2019-07-22 10:16:37
我要用labview进行二维扫描成像,不知道要用labview的什么控件才能显示出来,比如说幅值相位的信息,怎么把数据显示出来?
2016-01-19 10:39:44
基于驻相近似下得到的考虑遮蔽效应时的粗糙面散射一、二阶基尔霍夫公式,研究了满足半经验海谱分布的二维介质粗糙海面的电磁散射,分析了海面散射出现后向增强效应的条件,计算了不同极化状态的散射系数角分布
2010-05-28 13:41:23
测量。 VX3000系列二维图像尺寸批量测量仪器主要用于测量二维尺寸,打破了传统测量工具,大口径高景深,实现全视野范围成像清晰,低畸变。高分
2022-05-19 15:06:11
二维图像尺寸测量仪侧重于双远心镜头的整体成像(拍照式),结合高分辨率工业相机及高精度图像分析处理算法,通过软件计算后实现测量。外形设计充分利用空间结构,以及人性化设计理念,小巧精致,占地面积小。拍照
2022-10-14 17:13:17
在光纤出射光场分布模型基础上,引进了Huffman 在图像分析中使用的梯度空间概念,考虑了粗糙表面局部的空间光散射梯度,建立了二维光纤粗糙表面反射接收模型,设计了二维光纤传感
2009-07-14 10:25:38 32
32 本文提出一种将时空二维混沌应用到数字水印中去的算法。首先利用时空二维混沌直接生成信息模板,加入到作品图像离散余弦变换(DCT)域的频率成分中去。合法使用者通过时
2009-07-15 11:13:0410 以 QR 矩阵码为例,介绍一种实用的二维条码识别算法。首先探讨了二维条码的定位与分割算法,利用Hough 变换与Sobel 边缘检测把条码图像从原始采集的图像中有效地分割出来;然
2009-08-12 17:30:0640 Delaunay三角剖分插值用于超分辨成像:微变焦超分辨成像在插值重建方面比较困难,目前基于最小二乘估计的频域模型和空域模型也都存在一些局限性。为了兼顾超分辨成像的实时性
2009-10-21 08:04:0622 精确的运动补偿是高分辨率机载SAR 成像的关键,尤其对于机载小平台和大扰动情况下的成像具有重要意义。为了获得高质量的SAR 图像,该文结合波数域算法,考虑运动误差的二维空
2009-11-24 14:59:5014 针对相干分布式信源二维波达方向估计算法多采用谱峰搜索导致计算复杂度较大的问题,该文提出了一种二维波达方向分离估计算法。该算法通过将积分形式的相干分布式信源方向
2009-11-24 15:19:3715 在基于外辐射源的无源雷达成像算法中,获得方位向的高分辨率需要大的目标累积转角,然而在实际系统中,一方面大转角需要时间长,难以满足实时要求;另一方面,目标散射函
2009-11-25 14:46:248 本文重新推导了Lynett 和Liu 的水平二维内波传播模型并在修正其几处错误后将其应用到了序列SAR 图像的内波数值模拟上。同时结合M4S 模型对数值模拟结果进行了SAR 成像仿真,结
2009-12-19 14:22:1715 雷达对近场目标的探测成像是探地雷达成像和微波医学成像的基本模型。为得到高分辨的近场目标雷达图像,论文从标量波动方程出发通过波散关系导出了目标散射信号和目标函数
2009-12-29 17:16:2220 文中提出新的高精度, 快速二维声源定位算法。计算机采集四个声音传感器, 一个风速传感器和一个风向传感器的信号, 计算出声源的位置和当地的声速。用语言进行的仿真分析结
2010-07-08 16:10:08135 中图仪器VX8000零件二维尺寸闪测仪采用双远心高分辨率光学镜头,结合高精度图像分析算法,并融入一键闪测原理。CNC模式下,只需按下启动键,仪器即可根据工件的形状自动定位测量对象、匹配模板、测量评价
2025-04-10 10:20:58
基于FPGA雷达成像方位脉冲压缩系统的设计
合成孔径雷达成像算法中较为成熟和应用广泛的算法主要有距离-多普勒(R-D)算法和线性调频变标(CS)算法。R-D算法复杂度相
2009-12-02 11:44:10 1534
1534 
本文在介绍阵列信号处理和超分辨测向技术基本原理的基础上,建立了基于解相干算法的一维、二维超分辨测向数学模型,分别以均匀线阵、均匀圆阵等阵列形式为模型进行了针对相干源的计算机仿真实验。
2011-02-22 14:49:3513 提出一种全新的算法,该算法针对三维的数学模型进行等价拆解为二维模型,进行平面几何解析,通过分析,总结出几个简单的公式,使得算法简单,便于理解。该模型可应用于相控阵雷达和火
2011-11-30 17:28:4130 提出了一种新的二维DCT和IDCT的FPGA实现结构,采用行列快速算法将二维算法分解为两个一维算法实现,其中每个一维算法采用并行的流水线结构,每一个时钟处理8个数据,大大提高电路
2012-01-12 10:35:5459 给出了一种运动人体区域的检测及其对应的二维关键点的提取方法。首先运用帧差法构建一个自适应的背景模型以达到背景初始化和背景更新的目的。接着用减背景法实现二维运动人体
2012-02-08 11:39:0738 结合机载下视三维SAR和曲线合成孔径雷达(CSAR),提出了一种下视圆周SAR的三维成像结构。在此结构下推导回波信号模型,发现回波信号中切航向和沿航向存在二维耦合项,使得传统的RD算法
2012-02-10 16:44:3039 介绍了合成孔径雷达的成像原理,简述了InSAR的测高步骤,重点论述了去平地效应和两种相位解缠算法,最后分别利用分支截断法和最小二乘法两种解缠算法,进行了高斯山模型的解缠绕仿真
2012-03-23 11:13:1441 讨论了无线网络通信中多径窄带信号的二维到来方向估计算法的特点和性能,提出了一种基于双平行线阵列结构的二维到来方向估计的快速算法.与以前的工作相比,该算法在求解过程
2012-03-28 15:12:0319 AutoCAD、浩辰CAD这些软件主要应用在二维设计领域,但也集成了部分三维功能,支持三维实体的创建、编辑。如果要创建三维模型,AutoCAD、浩辰CAD当然不是最佳选择,但如果有三维模型
2012-10-22 11:21:3510544 
在自主移动机器人上安装二维激光测距仪和内置室内小型电机云台。将激光的平面信息和电机云台的高度信息结合构建一个三维模型。通过RANSAC算法从三维点云阵中提取平面。并在图像
2013-09-16 14:46:4170 、雷达波形、多普勒处理、检测基础原理、恒虚警率检测、合成孔径雷达成像技术、波束形成和空-时二维自适应处理导论。
2016-04-05 14:20:3539 、雷达波形、多普勒处理、检测基础原理、恒虚警率检测、合成孔径雷达成像技术、波束形成和空-时二维自适应处理导论。
2016-04-05 14:23:2620 、雷达波形、多普勒处理、检测基础原理、恒虚警率检测、合成孔径雷达成像技术、波束形成和空-时二维自适应处理导论。
2016-04-05 14:30:3828 二维弹道修正引信弹道辨识模型及精度仿真分析
2016-12-17 16:33:3914 超宽带雷达成像理论的初步探讨,有需要的下来看看
2016-12-28 10:16:4318 二维EMD的指纹边缘检测算法_贾可
2017-03-19 19:04:231 电子发烧友网站提供《固定二维码与变动二维码防伪标签的作用.docx》资料免费下载
2017-05-08 08:00:001 文中提出了一种新的快速算法,该算法并不对维信息进行大量的计算,而是根据Otsu 准则的性质;将- 二维直方图降维成两个一维直方图,分别对两个一维直方图利用Otsu 准则的性质进行快速的运算,从而得到
2017-10-30 18:21:3615 一维数组只有一个下标,,称为一维数组,其数组元素也称为单下标变量。在实际问题中有很多量是二维的或多维的,因此C语言允许构造多维数组。多维数组元素有多个下标,以标识它在数组中的位置,所以也称为多下标变量。本小节只介绍二维数组,多维数组可由二维数组类推而得到。
2017-11-16 08:49:2422433 
针对高维输入数据维数较大时可能存在奇异值问题,同时为提高算法的运算效率以及算法的鲁棒性,提出了一种基于Ll范数的分块二维局部保持投影算法B2DLPPLI。传统的局部保持投影算法为避免出现奇异值
2017-11-22 10:50:276 Voronoi图是计算几何中的重要概念之一。在计算机图形学、计算几何、有限元网格划分、机器人轨迹控制、模式识别、气象学和地质学研究中得到广泛应用,现有的二维Voronoi图算法都是基于平面点集
2017-12-20 15:24:020 差异性的角度提出了一种使用迭代最小二乘字典学习算法(ILS-DLA),并使用锚定邻域回归(ANR)进行图像重建的单幅图像超分辨算法。迭代最小二乘法的整体优化过程极大地缩短了低分辨字典/高分辨字典的训练时间,它采用了与锚定邻
2017-12-22 11:04:430 针对如何检测数字图像内容是否完整、有无篡改,提高认证图像质量的问题,提出了一种基于二维直方图移位的图像认证算法。首先,在棋盘格结构中利用两种预测差值计算方法构建原始图像的二维直方图,由预先设定的参数
2018-01-03 13:40:100 表(forward information base,简称FIB)的存储空间,大幅增加硬件成本.提出了一种二维转发表分解存储模型(decomposition storage model
2018-01-04 15:33:210 针对接收信号强度值( RSSI)的时变特性降低定位精度的问题,提出了一种基于二维网格特征参数融合的室内匹配定位算法。该算法融合RSSI和信号到达时间差(TDOA)构建网格特征参数模型,基于二维网格
2018-01-29 11:52:370 合成孔径雷达成像算法中较为成熟和应用广泛的算法主要有距离-多普勒(R-D)算法和线性调频变标(CS)算法。R-D算法复杂度相对较低,运算比较简单,虽然其成像质量并不高,但是相比对稳定性、存储空间
2018-12-30 11:10:005100 
识别技术作为雷达目标识别的一种新技术正在日趋成熟。而与二维成像雷达相比,易于实现的一维成像雷达(高距离分辨率雷达)在目标识别方面有着广阔的前景。
2020-07-20 08:18:003397 
本文档的主要内容详细介绍的是C语言程序设计教程之二维数组如何应用二维数组的资料概述主要内容包括了:1 了解二维数组2 二维数组的简单应用3 利用地址和指针访问二维数组4 二维数组名作函数的实参5 二维数组操作中的常用算法介绍
2018-10-26 16:48:103 本文主要设计一种残缺二维码的识别算法,通过设计具备记忆能力的神经网络,建立残缺二维码与电缆信息的映射关系,从而在二维码因外界原因出现残缺的时候,能够读取与之对应的电缆信息。该算法中的神经网络采用
2018-11-19 16:01:4425 为了进一步提高混沌系统的混沌特性,为图像加密算法提供更可靠的混沌系统,增强图像加密算法的安全性,提出了一种基于二维反三角超混沌系统的新型图像加密算法。首先,在一维三角混沌函数的基础上构建了一个二维反
2019-05-17 16:38:4615 但是随着需求的不断增加与应用领域的不断拓展,寻找一个尺寸、性能、兼容性等各方面都符合要求的二维成像模块却没那么容易。有些体积不够紧凑不便于安装,有些扫描效果欠佳,有些升级复杂,有些产品功能不错但是在
2019-10-16 09:24:192536 为了进一步提高混沌系统的混沌特性,为图像加密算法提供更可靠的混沌系统,增强图像加密算法的安全性,提出了一种基于二维反三角超混沌系统的新型图像加密算法。首先,在一维三角混沌函数的基础上构建了一个二维反
2019-11-05 16:43:542 二维码不仅给人们生活带来便捷,在工业领域也被广泛应用。如何在嵌入式硬件中开发二维码功能?本文将为大家介绍ZLG二维码识别算法,教大家在ZLG硬件平台中快速搭建具备良好识别效果的二维码。
2019-12-04 16:54:421988 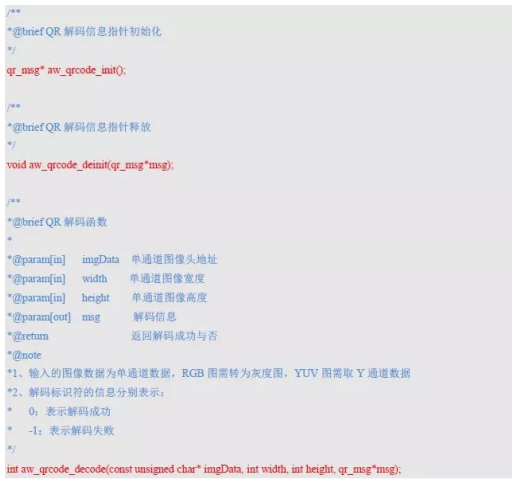
如今二维码已经是一种生活方式,支付、交友、出行、门禁。..。..无处不在,每年我们会消耗二维码超万亿个,100天,腾讯健康码用码量达1400亿个。那问题来了,如此大的用码量,二维码会用完吗?答案
2020-07-19 10:33:404583 
为了进一步提高混沌系统的混沌特性,为图像加密算法提供更可靠的混沌系统,增强图像加密算法的安全性,提出了一种基于二维反三角超混沌系统的新型图像加密算法。首先,在一维三角混沌函数的基础上构建了一个二维反
2020-08-31 14:23:007 目前的探测器上实现高分辨率的成像,超分辨率技术得以出现和发展。超分辨率技术一般分三类,一种是主要考虑多帧亚像素级位移,对模糊因子考虑较少;另一种是对成像中模糊因子进行估计,例如通过多通道盲反卷积;还有一类是
2020-09-27 10:53:481236 
工业二维码读取器在智能制造业领域的作用越来越重要,为了让多用户了解工业二维码的相关知识,从而大限度地提高读取率、增加产量和降低成本,让你对工业二维码读取器和工业二维码知识进行面的了解。
2021-06-24 17:41:165139 摘要: 为使高分辨雷达图像更精确反映舰船目标的结构、形状特点,研究了基于后向散射场数据的舰船目标高分辨雷达成像技术。建立了舰船目标三维模型,采用三角面元对模型进行剖分,利用物理光学法计算面元
2022-03-17 15:47:521587 近日,北京大学物理学院量子材料中心江颖、徐莉梅与美国内布拉斯加大学林肯分校曽晓成以及北京大学/中国科学院王恩哥等合作,利用高分辨qPlus型原子力显微镜技术,首次在实验上证实了冰在二维极限下可以稳定存在,将其命名为:二维冰I相,并以原子级分辨率拍到了二维冰的形成过程,揭示了其独特的生长机制。
2022-09-01 17:00:241927 一款X波段的雷达成像系统(含数据和程序)
2022-11-14 12:58:011717 合成孔径雷达(SAR)三维成像技术可以消除目标和地形在二维图像上产生的严重混叠,显著提升目标的发现、识别和三维建模能力。
2023-01-16 14:12:462506 本文研究了一种新的二维近场微波毫米波合成孔径雷达(SAR)成像系统多频压缩传感(CS)模型,该模型通常收集多频稀疏数据。
2023-05-15 11:09:241872 
布雷迪说:“成像的问题在于照片和成像系统只形成二维图像,但世界实际上是三维的”。他的稀疏全息工作为他赢得了2023年Optica颁发的埃米特·N·利斯奖章,这是一个致力于光学和光子学的国际组织。
2023-06-01 17:32:091389 雷达成像技术是上个世纪 50 年代发展起来的,它是雷达发展的一个重要里程碑。目前,机载和星载雷达成像的应用已十分广泛。
2023-06-15 09:53:465326 
二维码扫码读头有什么功能?如何选择二维码读头?二维码扫码读头可以将二维条码图像通过感光头读取、识别并解读,从而做出(二维码)信息的采集和传输处理;卓越的工业级别CMOS影像技术+国际领先水平的智能
2023-03-30 15:03:532702 
为了对场景进行二维成像,数据采集是通过在x-y平面上沿如下轨迹移动雷达来进行的,发射天线和接收天线如图所示,其中x,y,z分别表示水平、垂直和距离向。
2023-08-25 10:50:242562 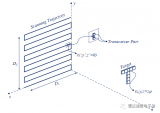
随着汽车智能化和自动驾驶技术的快速发展,车载激光雷达市场近年呈现出高速增长的态势。近日,瑞识科技推出新款二维可寻址激光雷达VCSEL芯片,可应用于搭载固态激光雷达的智驾方案,以实现更高级别的智驾功能
2024-04-01 11:16:581708 
一、方案概述二维平面定位系统,采用UWB定位技术,精度可到30cm。通过PDOA算法,可实现单基站二维平面的实时人员定位,增强对危险区域的管控,有效预防安全事故发生。面对突发情况,能做到及时报警响应
2024-06-04 14:53:242216 
门禁二维码刷卡梯控系统中的应用及其带来的多方面优势。一、二维影像扫描引擎的灵活性与便捷性门禁二维码刷卡梯控行业利用手机生成的二维码,用户只需将二维码对准扫描器即可完
2025-12-17 15:42:24211 
 电子发烧友App
电子发烧友App



 (2)
(2)
 (3)
(3) (4)
(4) (5)
(5)






 工商网监
工商网监
评论