 电子发烧友App
电子发烧友App


1 引言
射频识别( radio frequency identification, RFID) 技术, 是一种利用射频通信实现的非接触式自动识别技术, RFID标签具有体积小、容量大、寿命长、可重复使用等特点, 可支持快速读写、非可视识别、移动识别、多目标识别、定位及长期跟踪管理, 在众多领域获得了广泛应用。
RFID 系统由电子标签( tag) 、读写器( reader) 和数据管理系统构成。RFID 标签具有3 种类型: 主动、被动和半主动, 被动标签具有成本低的特点, 因而应用广泛。本文的研究范围为被动标签。
在应用时, 需要适当的规划来进行读写器的部署, 它直接影响着读写器网络的覆盖和识别效果。合理有效的读写器部署方案可以减少网络搭建时间, 全面覆盖目的区域。合适的协调方法可以减少读写器之间的干扰, 适应网络的变化, 保证整个网络的读取率。本文从这一角度出发,探讨了读写器网络的组网和协调技术, 指出读写器网络的部署和协调面临的问题和挑战, 在全面和系统地归纳、总结已有的研究的基础上, 提出了读写器网络的组网和协调技术的发展方向, 为进一步深入研究奠定了基础。
2 读写器网络的规划和部署
读写器网络规划和部署的目标是: 以最低的成本建造符合近期和远期读取需求、具有一定服务质量的读写器网络, 即达到目标区域最大程度的覆盖, 满足要求的通信概率; 尽可能地减少干扰, 达到所要求的服务质量; 尽量减少读写器数量, 以降低成本。
读写器组网有以下特点。
· RFID 网络系统结构呈现严重的非对称性, 无源电子标签的性能比较弱, 标签之间无法互相通信, 无源标签无法主动发送通信信号, 只能通过反向散射方式与读写器进行通信。
· RFID 系统中的无线传输环境相当复杂, 多数情况下, RFID 系统工作在室内环境, 此时必须考虑多径衰减效应。同时, 读写器—标签通信的典型距离小于10 m, 属于短距离通信。由于射频信号的本质特性, 并且为了保证覆盖, 读写器识别区域之间的交叉不可避免。
· 移动读写器的存在, 会使网络变得复杂。目前对读写器组网的研究有以下几种。
· 在已有的无线蜂窝网络优化模型基础上, 根据RFID 系统的特性, 提出了一种读写器网络部署的离散模型r=(site, antenna, tilt, Au), 其中tilt 表示天线倾斜角, Au 表示衰减。在覆盖约束、标签反射信号约束、最小化成本约束、最小化干扰约束的情况下, 采用遗传算法来求最优解。这些参考文献未考虑有移动读写器存在的情况下读写器网络的部署问题。
·Anusha 设计了一个自动覆盖规划工具RFIDcover,该工具适用于需要周期性完全覆盖的场合, 即可在每个τ时间段内将所有标签都覆盖一遍, 确定需要的固定和移动读写器数目, 并确定移动读写器的运动模式以及该场地的布局图。但参考文献[4]只对工具的结构和功能进行了介绍。
3 读写器协调技术
读写器协调的目的是保证整个系统的通信需求, 主要避免读写器冲突以及控制功率。读写器冲突[5,6]是指由一个读写器检测到的由另一个读写器引起的干扰, 包含两种情况: 读写器频率冲突和标签冲突。读写器频率冲突发生在两个或两个以上读写器同时使用相同的频率与标签通信时; 标签冲突是指两个或更多读写器同时与一个标签通信时发生的冲突。
读写器冲突的特点如下: 无源标签的低性能特性, 使其在与多个读写器通信过程中无法发挥防冲突作用; 读写器冲突在手持式移动读写器大量使用时, 会大大加剧。
3.1 现有的研究
3.1.1 EPC C-1 2 代标准
EPC C-1 2 代标准[7]是EPC Global 制定的860~960 MHz空中接口协议。该标准采用频谱规划( 指FDMA) 的方法划分读写器传输和标签传输频谱, 一方面使得标签冲突与读写器无关, 另一方面使得读写器冲突与标签无关。通过在不同频率信道进行读写器传输和标签传输, 解决了读写器—读写器频率干扰问题。但由于标签不具有频率选择性, 因此当两个读写器用不同频率同时与标签进行通信时, 标签都将响应并导致在标签处发生冲突。因此, 在这个标准中多个读写器与标签的干扰仍然存在。
3.1.2 ETSI EN 302 208 标准
对于读写器冲突问题, ETSI 302 208 标准[8]采用了基于载波侦听( CSMA) 的“listen before talk( LBT) ”方法, 具体内容为: 在传送信号之前, 读写器必须侦听在它要使用的信道内是否有其他阅读器的信号, 如果通道空闲, 将阅读标签; 如果通道忙, 将随机选择一段退避时间, 再继续。但是在密集读写器环境下, LBT 使整个读写器网络不能工作在最优模式[6], 因为LBT 会使很多本来能用的通道关闭。
3.1.3 Colorwave 算法
Colorwave 算法[9]是一种分布式在线TDMA 算法。基本思路是: 对于每个读写器, 在0~maxColors 范围随机选择一个时隙( 颜色) 进行通信, 如果发生冲突, 则随机选择另一个时隙( 颜色) 并通知邻近的读写器; 如果相邻读写器内有同样的时隙( 颜色) , 则该读写器重新选择一个新的时隙( 颜色) ; 读写器同时跟踪当前时隙的颜色。在Colorwave 算法中, 每个读写器监测数据的发送成功率, 若超过了安全限值, 则修改maxColors 值; 若仅是局部某个读写器超过了安全限值, 则其他读写器仍然保持其maxColors 值不变; 若读写器普遍超过了安全限值, 则产生一个色度跳变波, 该色度跳变波从起始的读写器传遍整个系统, 使得大部分读写器改变自身的maxColors 值。
该算法要求读写器同步, 同时假设读写器能够检测冲突。但是仅仅由读写器检测发现冲突是不可行的, 如果有读写器移动, 可能会导致全部读写器重新分配时隙( 颜色) , 使得整个系统效率降低。
3.1.4 Q 学习算法
Q 学习算法[10]为一种多层、在线的强化学习方法。该算法为多层结构, 由Q-Server、R-Server 和读写器层构成, 通过对读写器冲突模式的学习, 动态地分配频率和时间给读写器, 可以减少读写器冲突。但是该算法的多层结构, 使得系统开销大, 也不适合读写器网络拓扑变化较大的场合。
3.1.5 PULSE 算法
PULSE 算法[11,12]将读写器的通信信道分为控制信道和数据信道, 要求控制信道的通信范围比数据信道大很多。控制信道用来发送忙音信号, 用于读写器之间的相互通信; 数据信道用于读写器与标签间的通信。当读写器与标签通信时, 先检测控制信道, 如果有忙音信号, 则随即延迟等待; 如果无忙音信号, 其随机延迟后与标签进行通信, 并在控制信道广播忙音信号, 通知邻近的读写器, 这样就避免了冲突。该算法较适合网络拓扑变化比较快的读写器网络, 但其假设读写器能够同时在控制信道和数据信道上进行通信, 增加了额外的硬件成本。
3.1.6 REQ-BUSY 算法
REQ-BUSY 算法[13]和DiCa 算法[14]为类似于PULSE 的算法, 这两种算法中通信信道分为控制信道和数据信道,读写器需要通信时, 先随机延迟一段时间, 然后在控制信道发送请求信号, 如果邻近读写器中有正在通信的, 将返回忙信号, 该读写器接收到忙信号后, 随机延迟, 然后重新发送请求信号; 如果该读写器没收到忙信号, 那么其将与标签进行通信。这两种算法中读写器利用单信道与标签通信, 没有有效利用频谱资源。
3.1.7 基于IRCM的反碰撞算法
读写器碰撞模型( IRCM) [15] 建立在读写器碰撞网络( RCN) 基础上, RCN 将RFID 系统建模成一个无向图, 若两个读写器有交叉覆盖范围, 则其之间有连线。IRCM定义了读写器的碰撞相邻表和路由表, 碰撞相邻表内为能与该读写器发生冲突的相邻读写器, 路由表内为不会与其发生冲突的读写器。在识别标签的过程中, 每个读写器计算自己的正确读取率(QT) , 并将其发送给碰撞相邻表和路由表中的读写器, 收到此值的读写器重新估计整体碰撞的情况, 调整自身的QT 阈值以改变对标签的读取速度, 缓解整个网络的碰撞。参考文献[15]中只给出了IRCM及算法思想, 未详细说明如何调整QT 阈值以改变读取速度。
3.1.8 RRE 算法
参考文献[16]对RFID 网络中的冗余读写器问题进行了研究, 提出了一种随机、分布式的算法RRE( redundant reader elimination) , 在保证覆盖的基础上辨别出冗余的读写器, 可以将这些冗余读写器安全关闭, 以节约移动读写器的电能以及减少读写器冲突。该算法的步骤为: 首先由读写器探测周围的标签集合; 其次每个读写器将其覆盖的标签数目写入其覆盖范围内的标签, 在多个读写器覆盖范围内的标签, 只接受数值较大的标签数目的写入, 写入数值最大的读写器被认为锁定了此标签; 最后每个读写器顺序询问其覆盖范围内的标签, 查找被其锁定的标签。没有锁定任何标签的读写器被认为是冗余的。
3.1.9 LLC(W-LCR) 算法
J. Kim 等[17, 18]将RFID 读写器网络分成具有一定层次的读写器簇结构, 根据一定的权值动态调整每一簇间的问询半径, 在保证区域内所有标签均被覆盖的前提下, 减少读写器簇间的问询重叠区域, 从而使读写器网络中读写器冲突的产生最小化。但该方案的缺点在于: 由于环境的复杂性, 读写器簇间问询半径的动态调整策略难以确定, 以致于在现实中难以实施。
3.1.10 TPA-CA 算法
TPA-CA 算法[19]假设有一个RFID 控制器知道所有的读写器位置。该算法由3 部分组成: 网络拓扑配置(NTC)部分、读写范围调节( IAR) 部分以及迭代部分。NTC 部分最小化读写器间的重叠覆盖范围, IAR 通过控制读写器的功率来调节读写范围, 由于有移动读写器的存在, 读写器间拓扑会变化, 所以需要不断地进行迭代重复计算。但实际有移动读写器时, 精确的位置确定和读写器间重叠覆盖范围的计算都比较困难, 并且该算法需要一个控制器。
3.1.11 DAPC 和PPC 功率控制算法
Kainan Cha[20]在保证系统的全面覆盖和保持一定的期望读取率基础上, 提出了2 种读写器功率控制方案: 分布式自适应功率控制(DAPC) 方法和随机功率控制( PPC) 方法。DAPC 由两个模块构成: 自适应功率修正( adaptivepower update) 和选择性后退( selective back-off) 。自适应功率修正模块根据冲突情况和信噪比来修正功率, 但是在密集读写器环境下, 自适应功率的修正往往使得相互干扰的读写器发射功率达到最大。选择性后退模块让一部分读写器先降低功率或者关闭, 使得其他读写器能正常读写, 该过程在整个读写器网络中重复进行。
PPC 选择了一种随机分布( Beta 分布) , 读写器按照此分布并根据时隙内的冲突情况动态调整发射功率, 使读写器达到最大的读写范围并具有良好的覆盖半径。
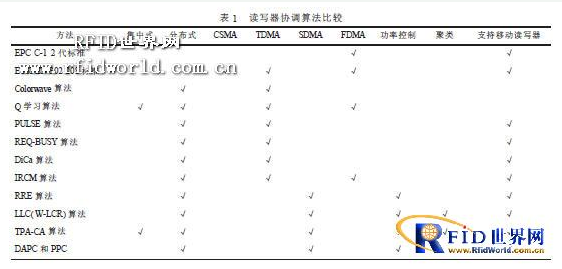
3.2 算法比较
以上的读写器协调方法采取了不同的思路来对读写器进行控制和调节, 可以按照频分多址( FDMA) 、时分多址( TDMA) 、空分多址( SDMA) 分类, 也可依据是否采用载波侦听( CSMA) ; 是否采用集中式控制或分布式控制; 是否支持移动读写器; 是否采取功率控制; 是否属于聚类( clustering) 等方法分类。表1 对这些算法进行了比较。目前除了EPC C-1 2 代标准和EN 302 208 标准已在实际中应用外, 其他的方法均为理论研究, 有的只是模型( 例如: IRCM) 。Colorwave 算法基于图论的染色理论, 但染色理论本身就是个NP( nondeterministic polynomial) 问题。
Q 学习算法基于多层结构, 实用性不高。PULSE 算法、REQ-BUSY 算法和DiCa 算法为一类, 后面两种算法为PULSE 算法的改进, 该类算法简单, 但是都未有效利用频谱资源。LLC(W-LCR) 算法和TPA-CA 算法均可调节读写器间重叠覆盖范围, 但在实际应用中难精确确定读写器的位置。RRE 算法采用关闭冗余读写器的方式, 但冗余读写器的确定比较困难, 并可能会漏读标签。采用DAPC 和PPC 功率控制算法后仍会存在标签冲突。
4 研究方向
4.1 包含移动读写器的读写器网络的部署
在包含移动读写器的读写器网络中, 读写器冲突以及变化的拓扑结构是其显著特点, 也是从发展角度研究读写器网络部署必须解决的问题。以前对读写器网络部署的研究一般是针对固定读写器, 因此, 没有太多考虑包含移动读写器的情况。包含移动读写器的读写器网络部署涉及到移动和固定读写器的数量、移动读写器的运动线路和运动速度、移动读写器的运动引起的固定读写器的拓扑结构变化、移动读写器的周期性覆盖范围的判定等。
覆盖时的功率控制也是包含移动读写器的读写器网络部署的研究方向。移动读写器一般靠电池提供电源, 这就使得节能问题显得很重要, 并且进行功率控制也可以减少读写器间的干扰。
4.2 读写器协调
目前读写器网络结构的改进有两种趋势。一种是降低Q 学习算法基于多层结构, 实用性不高。PULSE 算法、REQ-BUSY 算法和DiCa 算法为一类, 后面两种算法为PULSE 算法的改进, 该类算法简单, 但是都未有效利用频谱资源。LLC(W-LCR) 算法和TPA-CA 算法均可调节读写器间重叠覆盖范围, 但在实际应用中难精确确定读写器的位置。RRE 算法采用关闭冗余读写器的方式, 但冗余读写器的确定比较困难, 并可能会漏读标签。采用DAPC 和PPC 功率控制算法后仍会存在标签冲突。
读写器的功能, 读写器间相互不能通信, 依靠集中控制器( 系统) 来进行协调。对于这种网络, 读写器间的协调类似于无线蜂窝系统中的频率分配及功率控制问题, 今后的研究方向是综合考虑频谱、时间及空间资源, 根据实际应用中的通信需求, 采用组合优化的方法来进行解决。
另一种是增强读写器的功能, 依靠读写器本身来进行读写器间协调。这种网络类似于传感器网络和ad hoc 网络[2], 可参考这些通信网络中的协调技术, 根据RFID 读写器网络的特点, 研究用分布式方法来解决读写器协调问题。
对于标签冲突问题, 由于无源标签的特性, 解决方法只能采用时分多址, 即有重叠覆盖范围的读写器只能同时有一个对重叠覆盖范围内的标签进行读写, 这是读写器协调中必须考虑的。
责任编辑:ct















 工商网监
工商网监
评论