 电子发烧友App
电子发烧友App


在包括机器人、自主驾驶车辆、工业自动化、物流和资产跟踪、无人机以及农业和重型建筑设备的广泛应用中,越来越多地通过欧洲伽利略、美国全球定位系统 (GPS)、俄罗斯格洛纳斯、中国北斗导航卫星系统和日本 QZSS 的多星座全球导航卫星系统 (GNSS) 接收器来使用各种基于位置的功能。使用多星座 GNSS 接收器的优势在于:更好地提供定位、导航、定时 (PNT) 信号,提高准确性、完整性并改善应用的稳健性。
但是,多星座接收器开发是一项复杂、耗时的工作,其中包括:优化 L 波段天线;设计射频 (RF) 前端;整合基带信号处理算法以获取、跟踪和应用各种 PNT 信号的修正;对应用的处理软件进行编码,以便从基带的每个通道提取 PNT 数据并使用这些信息实现系统功能。设计者还必须选择合适的天线并将其正确放置。
可选的方法是,设计者可以转向预制型 GNSS 模块和开发环境,快速有效地将定位功能集成到系统中。这种 GNSS 模块包括射频前端、基带处理和嵌入式固件,以便加快应用处理软件的开发。有些 GNSS 模块还包括天线。
本文将介绍 GNSS、PNT 和多星座 GNSS 接收器的基本工作原理。然后,在介绍 STMicroelectronics、Septentrio 和 Würth Elektronik 提供的几款 GNSS 模块(带和不带集成天线版本)以及相关的评估板之前,探讨在 GNSS 模块中集成天线的利弊。设计者可以利用这些模块经济地高效地开发基于位置的准确、稳健的应用。
什么是 GNSS 和 PNT?
GNSS 和 PNT 是密切相关的概念。GNSS 卫星是 PNT 信号的最常见来源。GNSS 卫星本质上是高度精确的同步时钟,不断广播其 PNT 信息。GNSS 模块接收来自特定卫星的 PNT 信号并计算其与该卫星的距离。当接收器知道与至少四颗卫星的距离时,就可以估计其本身的位置。然而,位置估计的准确性受到各种误差源的影响,具体包括:
- GNSS卫星中计时电路的时钟漂移
- 预测 GNSS 卫星准确轨道位置的 误差
- 整个卫星设备相对于其他卫星的一般性能漂移,也就是所谓的卫星偏移
- 信号在通过电离层和对流层时发生失真和延迟。
- 多路径反射和接收器中的可变性能和漂移
目前,设计者可以采用各种不同技术校正基于卫星和大气的 GNSS 误差。
提高 GNSS 性能
把源自 GNSS 接收器的误差影响降至最低的最佳方法是:使用适合特定应用的成本和尺寸限制的最高性能接收器。但是,即使是高性能的接收器也不是完美的;在很大程度上其性能还可提升。了解这些校正方法非常重要,因为这些方法会带来不同的性能,而且有些 GNSS 模块不能使用所有的校正方法。
有几种 GNSS 校正方法采用了地面参考基站(图 1)。实时运动学 (RTK) 和精密单点定位 (PPP) 是采用地面参考基站对 GNSS 进行校正的最成熟方法。近来又出现了 RTK-PPP 混合方法。

图 1:GNSS 用户接收器可以从参考网络中获取大气、时钟和轨道误差信息,以提高定位精度。(图片来源:Septentrio)
RTK 依靠单一基站或本地参考网络获得校正数据,可以消除大部分的 GNSS 误差。RTK 假定基站和接收器的位置很近——最多相距 40 公里或 25 英里,因此基站和接收器遇到的误差相同。后处理运动学 (PPK) 是 RTK 的一个变种技术,被广泛用于测绘,以获得高精度定位数据或厘米级精度。
只有轨道和卫星时钟误差被用来进行 PPP 校正。这些误差是卫星特有的误差,与用户位置无关,这就限制了所需参考基站的数量。然而,PPP 没有考虑与大气有关的误差,因此相对于 RTK 来说精度较低。此外,PPP 校正的初始化时间可能达到 20 分钟左右。较长的初始化时间和较低的精度使 PPP 技术在许多应用中无法使用。
对于那些要求接近 RTK 精度和快速初始化时间的应用来说,通常采用最新的 GNSS 校正服务,即 RTK-PPP(有时称为状态空间表示法 (SSR) )。这种技术采用一个参考网络,其基站间隔约为 100 km(65 英里),收集 GNSS 数据并计算卫星和大气的综合校正值。参考网络使用互联网、卫星或移动电话网络向用户发送校正数据。使用 RTK-PPP 的 GNSS 接收器能够达到亚厘米级精度。在选择使用 RTK、PPP 和 RTK-PPP 校正方法时会涉及到一系列的设计权衡,开发者需要进行审核,以选出适合具体应用情况的最佳解决方案。(图 2)。

图 2:三种常见 GNSS 校正方法的优缺点。(图片来源:Septentrio)
卫星增强系统 (SBAS) 正开始在区域范围内得以运用,以取代 RTK、PPP 和 RTK-PPP 的地面基站校正方法。SBAS 仍然使用地面站来测量 GNSS 误差,但这些地面站分布在各个洲。测量的误差在某个中心位置进行处理,在那里计算出校正值并传送到所覆盖地区的地球同步卫星。校正数据从卫星上播出,作为原始 GNSS 数据的叠加或增加。
GNSS 的精度取决于卫星测量和相关校正值的可用性和精度。高性能 GNSS 接收器在多个频率下跟踪 GNSS 信号,并使用多个 GNSS 星座和各种校正方法来提供所需的精度和恢复能力。由此产生的冗余可使性能稳定,即使有些卫星测量和数据遇到干扰时也是如此。设计者可以从各种 GNSS 精度和冗余能力中进行选择(图 3)。

图 3:GNSS 精度等级与相应的校正方法和选定的应用。(图片来源:Septentrio)
GNSS 模块:集成天线与外部天线
由于多星座定位的复杂性,采用供应商提供的各种模块有助于加快产品上市,降低成本并确保性能。也就是说,设计者需要考虑使用内部天线还是选择位于 GNSS 模块外部的天线。对于那些需要优先考虑上市时间和成本的应用来说,集成天线可能是更好的选择,因为这种天线所涉及的工程量要小得多。对于需要 FCC 或 CE 认证的应用,使用带集成天线的模块也能加快认证过程。然而,这样会增加解决方案的尺寸,而且集成天线解决方案的灵活性有限。
外部天线为设计者提供了更多的性能和布局选择。设计者可选择大型高性能天线或者较小的低性能天线。此外,相对于 GNSS 模块的位置,天线的放置更加灵活,这将进一步提高设计灵活性。由于放置灵活,因此外部天线可确保 GNSS 可靠工作。然而,天线放置和连接布线既复杂又耗时,需要特殊的专业知识,这可能会增加成本并延缓上市时间。
用于空间受限设计的微型 GNSS 模块
对于那些具备天线放置和布线方面专业知识的设计团队,可以使用 STMicroelectronics 的 Teseo-LIV3F,这是一款使用外部天线的多星座(GPS/伽利略/格洛纳斯/北斗/QZSS)GNSS 模块(图 4)。该模块采用 LCC-18 封装,大小为 9.7 mm × 10.1 mm,具有1.5 m 圆误差概率 (CEP) 定位精度,冷启动和热启动的首次定位时间(TTFF)分别低至 32 s 和 1.5 s 以内(GPS、格洛纳斯)。该器件的待机功耗为 17 μW,跟踪功耗为 75 mW。

图 4:Tesco-LIV3F GNSS 模块包括 GNSS 内核和子系统,以及所有必要的连接和电源管理功能,封装尺寸为 9.7 x 10.1 mm。该器件需要采用外部天线。(图片资料来源:STMicroelectronics)
Tesco-LIV3F 的板载 26 MHz 温度补偿晶体振荡器 (TCXO) 有助于确保高精度,而专用的 32 kHz 实时时钟 (RTC) 振荡器能够缩短首次定位时间 (TTFF)。诸如数据记录、七天自主辅助 GNSS、固件 (FW) 可重新配置以及 FW 升级等功能,都是通过 16 Mb 嵌入式闪存实现的。
适合 Tesco-LIV3F 的应用包括保险、物流、无人机、收费、防盗系统、人员和宠物定位、车辆跟踪和紧急呼叫。
Teseo-LIV3F 模块作为一种预认证解决方案,可以缩短最终应用的上市时间。该器件的工作温度范 -40℃ 至 +85℃。
为了测试该模块并加速应用开发,设计者可以使用 AEK-COM-GNSST31 评估板。当与 X-CUBE-GNSS1 固件搭配使用时,评估包可以支持采集、跟踪、导航和数据输出功能,而无需外部存储器。该 EVB 也需要与 SPC5 微控制器搭配使用,用于汽车应用的开发。
具有干扰抑制功能的 GNSS 模块
Septentrio 的 410322 mosaic-X5 多星座 GNSS 接收器是一款低功耗、表面贴装模块,尺寸为 31 mm x 31 mm x 4 mm。该器件为设计者提供了一系列接口,包括四个 UART、以太网、USB、SDIO 和两个用户可编程 GPIO。
mosaic-X5 专为机器人、自主系统和其他大众市场应用而设计,其刷新率为 100 Hz,延迟低于 10 ms,垂直和水平 RTK 定位精度分别为 0.6 cm 和 1 cm。该器件可以跟踪所有的 GNSS 星座,支持当前和未来的信号并与 PPP、SSR、RTK 和 SBAS 校正兼容。该模块的 TTFF 在冷启动时少于 45 s,在热启动时少于 20 s。
mosaic-X5 采用了多项 Septentrio 专利技术,包括 AIM+。这是一种板载干扰抑制技术,可抑制各种干扰——从简单的连续窄带信号到复杂的宽带和脉冲干扰。
这些模块的接口、指令和数据信息都会完整地记录下来。随附的 RxTools 软件允许接收器配置和监视,以及记录、分析数据。
Septentrio 的 410331P3161 mosaic-X5 开发套件使设计者能够探索、评估和开发能够充分发挥 mosaic-X5 功能的原型(图 5)。

图 5:设计者可以使用 410331P3161 mosaic-X5 开发套件创建一个原型,可以使用包括以太网、COM 端口或 USB 2.0 在内的各种连接,或者使用 SD 存储卡完成此项工作。(图片来源:Septentrio)
该套件使用 mosaic-X5 的直观网络用户界面,便于操作和监视,让设计者能够从任何移动设备或计算机对接收模块进行控制。网络界面使用易于阅读的质量指标来监视接收器的运行情况。
设计者可以通过使用以下任何一种连接方式整合 mosaic 开发套件来构建原型:以太网、COM 端口、USB 2.0、SD 存储卡。
采用集成天线的 GNSS 模块
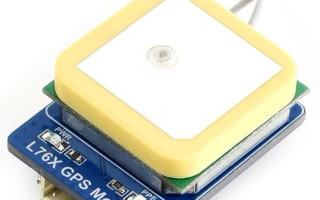
针对那些能够充分发挥带有集成天线的 GNSS 模块优势的设计者,Würth Elektronik 推出采用高性能片上系统 (SoC) 的 2614011037000 Erinome-I 模块(图 6)。该模块支持 GPS、格洛纳斯、伽利略和北斗全球导航卫星系统星座,并在顶部配备了集成天线,能够简化硬件集成,缩短上市时间。该模块(包括集成天线)的尺寸为 18 mm x 18 mm。

图 6:2614011037000 Erinome-I 是一款完整的 GNSS 模块。该模块采用了高性能 GNSS SoC 和集成天线。(图片来源:Würth Elektronik)
该模块还集成了 TCXO、射频滤波器、低噪声放大器 (LNA) 和串行闪存。
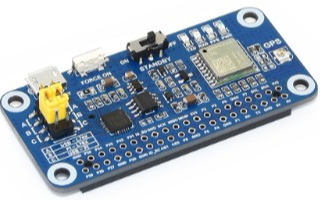
Würth 还为 Erinome-I 提供了 2614019037001 评估板 (EVB)(图 7)。EVB 也可以作为在应用中集成 GNSS 模块的参考设计。其中,USB 端口可用来连接 EVB 和 PC。通过多针连接器,设计者能够访问 GNSS 模块的所有针脚。

图 7:用于 Erinome-I 的 2614019037001评估板(靠近板中心的位置,在模块中心部位可看到集成天线)也作为参考设计。(图片来源:Würth Elektronik)
Würth Elektronik 导航和卫星软件 (WENSS) 是一个简单的 PC 工具,通过 UART 接口与 Erinome-I GNSS 模块互动。该软件支持:
- 控制 EVB 运行
- 与 Erinome-I 模块双向通信
- 评价 Erinome-I 的特点和能力
- 熟悉 Erinome-I 协议、句子和指令
- 在不了解协议的情况下配置 Erinome-I
- 对 Erinome-I 使用的句子和指令进行解析
没有高级知识,使用 WENSS 也能轻松评估定位应用。有经验的开发者也可以使用 WENSS 进行更高级的配置。
总结
实现准确、可靠定位功能的最好方法是使用多个星座及相关的校正技术支持。这些都是复杂的系统,但设计者可以求助于预制型 GNSS 模块、相关的开发套件和环境,快速有效地比较各种选项并实施基于位置的功能和服务。
编辑:fqj



















 工商网监
工商网监
评论