 电子发烧友App
电子发烧友App


大家作为射频工程师一定都进行过微波测试,尽管大部分的RF 和微波测试系统所要量测的对象只有区区几种广泛的类别包括放大器、发射器、接收器等,但每一套个别的系统却会面临一些不同的环境条件、要求和挑战。虽然每一种状况可能都不一样,不过当我们在定义任何的RF和微波测试系统时,却有三项共通的因素会相互影响:效能、速度与稳定。
在每一位系统开发者面临的状况各有不同的情况下,能否在这三项因素间做的取捨将关系着量测结果是否能达到要求的正确性(integrity)水准。
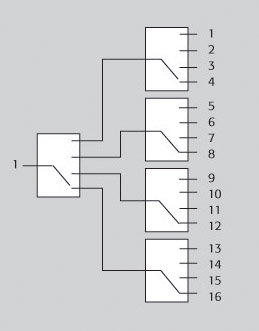
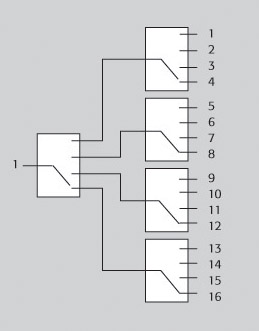
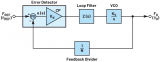
在DUT 到量测仪器之间的路径上(图1),有许多个点都会出现这些因素的取捨时机,本文建议了一个考量这些取捨因素的架构,并且提供六大秘诀,教您如何克服RF 信号路径上常会碰到的问题。
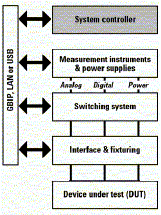
图1:在所有的测试系统架构下,都有很多的机会可以在效能、速度与稳定之间求取的平衡,以控管量测的正确性。
秘诀一:排定效能、速度与稳定的优先顺序
为了让全部六大秘诀有论述的依据,有必要先釐清我们对效能、速度及稳定的定义。在大部分的情况下,只有其中一个或两个因素会成为首要的考量条件,主导您的测试需求与设备的选择。无论如何,仔细地审视效能、速度与稳定之间的相互影响与取捨关系(如表1 到表3 的摘要所列),将可协助您掌控特有的需求状况。
基本的定义
在RF 和微波测试设备中,安捷伦科技对“效能”的定义主要指的是仪器的准确度、量测范围和频宽。仪器的准确度包括明订的振幅和频率量测准确度;量测范围指的是动态范围、失真、噪音位准和相位噪音,这些属性会影响信号位准量测的度;而频宽则是指可以处理和分析的频率宽度或资料速率。
速度测试系统的速度或Throughput 会取决于所使用的硬件、输入/ 输出(I/O)介面和软件,我们的重点将放在硬件和四项会影响速度的因素上:量测设定时间、量测执行时间、资料处理时间、以及资料传输时间。在RF 和微波的频率,设定时间中非常重要的一环就是DUT 或测试系统在每次变更(例如切换器的开或闭、功率位准改变)之后, 所需的稳定时间(settling time)。
稳定一致性对任何测试系统来说,每的测试以及每天的测试都能产生一致的结果是非常重要的。然而,稳定佳并不代表度也高,因为度会取决于个别仪器的效能,而稳定指的是无论明订的准确度为何,所量测到的结果都是一致的。就每一部仪器而言,稳定可能会因某些量测或模式而异,因此查看产品的规格或询问制造商是很重要的。
在某些程度内,透过更多次的平均,或修改演算法以准确地逼近符合标准量测方法所得到的结果,将可以提高稳定。将量测设定(如中心频率、频距和衰减位准)的改变次数减到少,可以达到的稳定一致性。
三者的关系概述
测试要求和商业上的考量可以协助您评估效能、速度与稳定之间的相对重要性,一旦您确立了首要的考量条件及其要求的高低程度后,就比较容易理出彼此的关系及其对系统的影响。
表1、表2 和表3 分别就两种状况:首要考量条件的要求为高或低,摘要整理了相互间的影响关系。
表1:以效能为首要的考量条件时,重要的相互影响因素是效能和速度。

表2:以速度为首要的考量条件时,重要的关系在于速度和稳定。

表3:以稳定一致性为首要的考量条件时,重要的关系也是稳定一致性和速度。

稳定与效能
在表1 和表3 中,稳定与效能之间有一个重要的第二层关系,这是由量测不确定度所串起的一种间接关系。面对不确定度时,有些系统开发人员会设计一个“误差量”(error budget),其大小取决于测试要求与系统不确定度之间的差距。
影响不确定度的两大主要因素是准确度(仪器的效能)和量测一致性(稳定)。如果系统中的仪器具有很高的准确度,那么误差量中就有较大的空间可以容忍较低的稳定。如果仪器可以提供一致的结果,那么误差量中也会有较大的空间可以容忍较低的准确度。
多项要求皆“高”
若要满足“高速与高稳定”或“高效能与高速”这类多重的要求,可能就需要使用复杂精密的仪器,其价格相较于能力较差的设备自然会稍微高一些。不过,许多高性能的仪器中可能会内建硬件加速器,可以加快一些耗时的作业,如平均计算和校准。
有些机种也可能包含多种演算法,可以计算诸如相邻频道功率(ACP)等参数。如果全部三项要求皆“高”,就必须仔细检查系统的每一个部份-测试设备、切换子系统、缆线、接头等。的解决方案很可能价格也不低,但可以提供一些额外的功能和优点。
秘诀二:审视DUT 的本质和特性
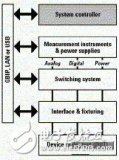
典型的自动化测试系统可以执行三项基本的任务:提供信号源、进行量测、以及进行切换,至于该使用哪一种信号产生器、功率錶、频谱分析仪、网路分析仪、切换矩阵(switch matrix)和缆线,则取决于DUT 的电性和机构属性。在RF 和微波的频率,有一些基本的特性需要特别留意。
电性参数
的基本性质是主要的考量:它是被动和线性的,或是主动和非线性的?被动的线性元件较容易处理,因为它们在整个工作频宽范围内所有允许的输入功率位准下,增益和相位偏移量一般都是固定的。相反地,主动元件就需要格外谨慎,因为它们通常具有非线性的工作区域,对输入功率相当敏感,可能会在不同的位准产生不同的结果。
如此一来,可能就需要在测试系统中加入放大器或,以地控制功率位准,而且也许还要加入耦合器,将输入到DUT 的功率位准分一些出来并确认是否正确。这些额外加入的东西千万不能轻忽:在高频下,每一个系统组成要件都具有复数的阻抗值(伴随有S参数),而且每多一项连接就有可能与DUT 产生不必要的相互影响。
避免不匹配:任何连接线的阻抗不匹配
都可能造成注入损耗(insertion loss),而损耗掉信号源或量测信号的一些功率。众所周知,在高频下功率是很昂贵的,而且如果必须在很广的频率范围提供所需功率的话,还会变得更加昂贵。
秘诀:使用度高的缆线和配件,且要使用向量式网路分析仪(VNA)充分量测缆线和配件的实际阻抗,特别是如果DUT 是主动元件的话。
将VSWR 降到
切换矩阵加上其接头、内部和外部缆线、甚至是任何RF 缆线的弯曲半径等组合,可能因DUT 的电压驻波而产生误差。
秘诀:若要将这项误差减到,可以使用电压驻波比(VSWR)规格为1:2:1 或更佳的切换矩阵。
增加隔离度
如果您的测试需要同时量测高位准和低位准的信号,则切换矩阵的隔离度规格将会影响量测的正确性。
秘诀:如果通过DUT 的路径有很多条,可以使用信号产生器和频谱分析仪,尽可能地量测出隔离度的特性。如果无法做到这一点,则系统在配置和设定时,应该将高位准和低位准的信号绕接到不相邻的路径上,或绕经不同的切换器。
机构属性
另外一组需要考量的细节是信号和电源(交流电或直流电)接头的数量和类型,这会影响所需的切换矩阵大小,以及系统接线的复杂度等因素。
秘诀:使用埠数足够的切换矩阵,就可以接好系统到DUT 的所有连接,这样一来,就可以将等待信号稳定所需的延迟时间缩到短,并且将功率位准突然改变而损坏切换矩阵或DUT 的机率降到。
秘诀三:瞭解、量测及修正RF 信号路径的特性
如果没有经过额外的修正,产品的规格多只能延伸到位于仪器输入和输出接头上的“校准”(calibration plane)而已。若要得到准确又稳定一致的量测结果,以及修正过的DUT 结果,我们建议将校准面往外推,尽可能地靠近DUT。
不论路径是被动或主动的,DUT 是位在本端或远端,都有几种方法可以做到。
被动路径的处理方式
被动元件在整个频宽范围内所有允许的输入功率位准下,都有固定的增益和相位偏移量。然而,沿着被动路径所接出去的每一条接线上可能会有阻抗不匹配的情形,因而造成注入损耗和相位偏移(或延迟)。在高频下,连简单的被动元素也会变成复杂的传输线元素,无法直接将路径上的损耗和相位偏移用简单的代数法相加得出。
秘诀:使用VNA 来量测整个相连的路径或分析每一项元素的S 参数特性,并使用向量学来模拟整个路径的总损耗和相位偏移量。这些数值可以储存在系统的PC 中,并且视需要予以套用,以修正量测结果,或者供网路分析仪使用,例如用来即时地调整滤波器和其他变动的DUT。
修正主动的路径
主动元件的效能会随着输入功率的改变而不同,若要提高量测的准确度,其做法会取决于元件是在其线性或非线性的响应区内工作。如果一个主动元件(如放大器)在校准和量测作业期间,是在远低于其1 dB 压缩点的线性区内工作,则可以在该区内的任何功率位准下进行准确的修正。
秘诀:如果主动元件是在其非线性的响应区内工作,则校准时也必须使用量测用的功率位准,以确保能够做准确的修正。如果需要在非线性模式下,于多个功率位准进行量测,那么也必须在每一个位准下分别进行校准,并储存起来供日后使用。
秘诀:在DUT 的频率范围内,检查主动元件的频率响应。同样地,您应该在特定的功率位准下量测整个路径,或是分析每一个介面的S 参数特性,并使用向量学,产生一个可以在事后套用或即时套用的模型。
秘诀:为了简化量测和修正RF 信号路径特性的作业,有些系统开发人员会尽可能少用主动元件,这样做可以减少校准的工夫,以及在非线性模式工作时,因功率位准改变而造成误差的机会。
审核编辑:汤梓红
















 工商网监
工商网监
评论