 电子发烧友App
电子发烧友App


什么是主动雷达寻的或雷达制导的空对空导弹系统?
有源雷达寻的系统由地面雷达系统与大尺寸天线组成, 带有多个雷达制导导弹外壳的主动雷达发射台和 主动雷达导弹本身。地面雷达可以是固定的,也可以是移动的。通常安装在现场的固定雷达称为空中监视雷达。雷达制导导弹装有雷达收发器,不像半主动雷达寻的导弹 其中仅包含雷达接收器。收发器是指由两个发射器组成的设备 和接收器功能。
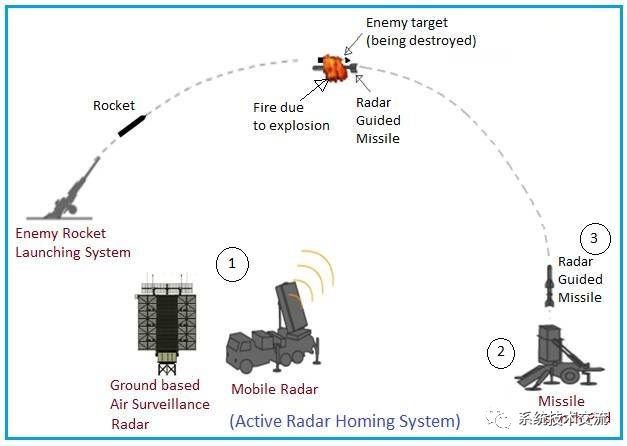
该图描述了有源雷达寻的系统组件。如图所示,它由三部分组成,即固定或移动雷达、导弹发射台和雷达制导导弹。让我们了解主动雷达寻的系统的工作原理。
• 地面雷达站连续点亮空气中的电磁能,从而得到 当目标在其范围内时,从目标反射。
• 一旦地面雷达系统检测到远程目标,它就会向导弹发射台提供信号 向目标释放空对空导弹。
• 一旦雷达制导导弹到达目标附近,它就会利用机载雷达收发器来 微调其射程以更接近目标并摧毁它。
• 为了取得成功,空对空雷达制导导弹在目标附近爆炸,摧毁所有目标 (即火箭)在其附近或直接击中目标。
主动雷达寻的或雷达制导导弹的好处或优势
以下是主动雷达寻的或雷达制导导弹的优点或优势:
➨与地面雷达制导的陆对空导弹相比,它更准确。
➨由于内置雷达收发器,它非常接近目标。因此,它更有可能摧毁目标。
➨一旦发射,它将负责摧毁目标本身,不再需要发射平台。这为启动提供了时间 平台跟踪其他目标。
有源雷达寻的缺点或缺点
以下是有源雷达寻的缺点或缺点:
➨与半主动雷达寻的系统相比,由于使用雷达收发器,它更昂贵。
➨由于使用电池进行操作,它具有较低的ERP(有效辐射功率)和有限的覆盖范围。
➨没有地面雷达系统的帮助,击中远程目标是不够的。
半主动、被动和主动雷达寻的导弹的区别
雷达寻的制导是防空导弹最常用的制导系统形式。根据其工作操作,有三种类型的雷达寻的导弹系统 即半主动、被动和主动。
半主动雷达寻的

图-1描述了半主动雷达寻的正常工作操作。以下是半主动雷达寻的的特点。
•它仅使用接收器,其中目标被雷达或其他外部光源照射。
• 来自目标的反射能量由安装在导弹上的接收器接收。
•与接收器连接的计算机用于确定 目标的相对轨迹。导弹系统使用这些信息来拦截 准确定位。
• 用于长空对空和地对空导弹系统。
• 用于“全天候”制导系统 防空系统。
示例:
RSAF 使用的第一代 SAM
主动雷达寻的
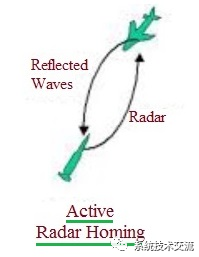
图-2描述了有源雷达寻的正常工作操作。以下是主动雷达寻的特色。
• 它传输能量并接收反射的能量。与半主动不同,上面是由导弹本身完成的,因为它同时容纳发射器和 接收器部件。
• 该雷达寻的系统不需要外部源。
示例:
• AMRAAM 空对空导弹 • 飞鱼反舰导弹
AMRAAM AIM-120是主动和半主动归位的组合。它支持约50公里的中程。
无源雷达寻的

图-3描述了无源雷达寻的正常工作操作。以下是无源雷达寻的特色。
• 它使用来自目标的热辐射。导弹正在使用热能来确定目标的参数。
• 它独立于任何外部指导系统。
• 它只接收信号,不能传输类似于半主动雷达寻的系统信号。
示例:
• RSAF 部署的米斯特拉尔是一种被动红外寻的制导系统。
• AIM9L/M 无源红外寻的导引头
• 可以轻松探测到半主动和主动寻的导弹。
• 被动寻的导弹难以探测,更容易打破锁定。
AESA雷达和PESA雷达的区别 |AESA 雷达与 PESA 雷达
比较了AESA雷达与PESA雷达,并提到了AESA雷达和PESA雷达之间的区别。AESA 代表有源电子扫描阵列,而 PESA 代表无源电子扫描阵列。
PESA雷达
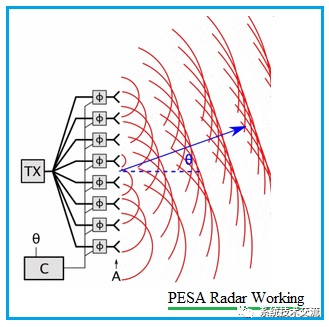
PESA雷达使用通用的共享射频源,其中信号使用以下命令进行修改 数控移相器模块。
以下是PESA雷达的特点。
• 如图-1所示,它使用单个发射器/接收器模块。
• PESA雷达产生无线电波束,可以电子控制 在不同的方向。
• 这里的天线元件与单个发射器/接收器接口。这里的PESA与AESA不同,AESA使用单独的发送/接收模块 每个天线元件。所有这些都由计算机控制,如下所述。
• 由于使用频率单一,极有可能 被敌方射频干扰器干扰。
•扫描速度慢,只能跟踪单个目标或 一次处理单个任务。
AESA 雷达
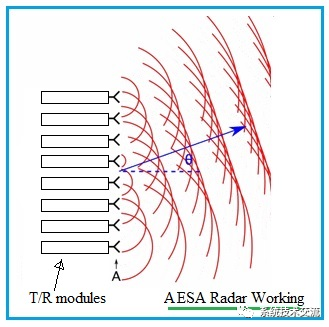
如前所述,AESA使用电子控制阵列天线 其中无线电波束可以电子控制以指向 在不同方向上相同,无需移动天线。它被认为是PESA雷达的高级版本。
AESA 使用许多单独的小型发送/接收 (TRx) 模块。
以下是AESA雷达的特点。
• 如图-2所示,它使用多个发射器/接收器模块。
• 多个发射/接收模块与多个天线接口 称为阵列天线的元件。
• AESA雷达同时产生不同无线电频率的多个波束。
• 由于具有在宽范围内产生多个频率的能力 范围,它被敌方射频干扰器干扰的可能性最小。
•它具有快速的扫描速率,可以跟踪多个目标或多个任务。
有关更多信息,请参阅 AESA 雷达框图。
以下是现代PESA和AESA雷达类型之间的相似之处。
• 现代PESA和AESA通常都是脉冲雷达。
• 现代PESA和AESA都是频率捷变和频率跳跃的 在不同时间的不同频率。
•两者都可以有窄带和宽带模式。
• 两者都可用于ECM,被动扫描,波束成形等。
单基地雷达与双基地雷达-单基地雷达和双基地雷达的区别
单基地雷达
图-1描绘了单基地雷达框图。如图所示,它使用相同的天线进行发射和接收。由于两个方向都使用单个天线,因此需要双工器将发射链与接收链分开,并且 反之亦然。
单基地雷达方程表示如下:
PR= ( pt* g2* λ2*σM)/((4*π)3*d4*Lt*Lr*Lm)
其中,
PR=接收天线接收的总功率
G =天线增益
λ = 波长 = c/频率,其中 c = 3 x 108
pt= 峰值发射功率
d = 雷达与目标
之间的距离 Lt=发射机损耗
Lr=接收器损耗
Lm=中等损失
σM= 目标的雷达横截面。
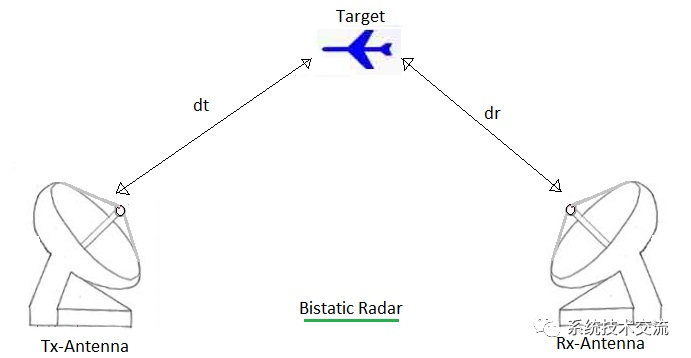
双基地雷达

图-2描绘了双基地雷达框图。如图所示,它使用两个独立的天线作为发射器和接收器,并且位于不同的位置。
示例:CW雷达可用作双基地雷达以及单基地雷达(当天线之间的距离非常小时)。
双基地雷达方程表示如下:
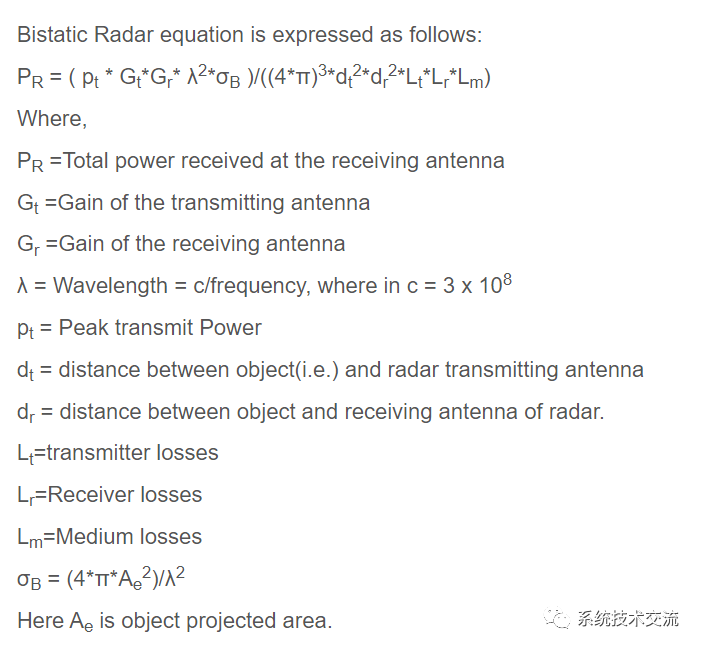
其中,
PR=接收天线接收的总功率
Gt=发射天线增益
Gr=接收天线的增益
λ = 波长 = c/频率,其中 c = 3 x 108
pt= 峰值发射功率
dt= 物体(即)与雷达发射天线
之间的距离 dr= 雷达的物体和接收天线之间的距离。
Lt=发射机损耗
Lr=接收器损耗
Lm=中等损失
σB= (4*π*Ae2)/λ2
这里 Ae是对象投影区域。
多普勒雷达
多普勒雷达非常简单,利用连续波进行传输。因此,多普勒雷达也被称为CW雷达。该雷达基于以下原理。返回信号的频率,即来自固定目标的回波与发射波相同,而 来自运动目标的返回信号的频率将根据多普勒频率进行偏移。通过测量发射频率和反射接收频率之间的差异,雷达提取目标的相对速度。
由于连续发射的形式,基本的多普勒雷达对距离测量没有用。这个概念用于下面描述的警察雷达,用于跟踪快速移动车辆的速度。它用于爬升率米,也用于测量飞机的速度。
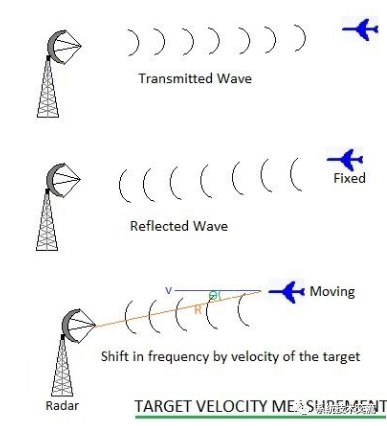
如图所示,如果目标是固定的,则发射波的数量与反射的接收波的数量相同。如果目标正在移动,则反射波的数量会根据目标向或远离的目标移动而减少或增加 雷达。
让我们假设目标正在向雷达移动。在这种情况下,雷达和目标之间的距离正在减少,这取决于 移动目标的速度大小。雷达经历返回的反射波频率的明显偏移,称为多普勒频移。当发射波以GHz为单位时,这种多普勒频移大约约为1KHz量级。基于这种频率速度的变化来确定目标,并且还可以找到其移动方向。下面用多普勒雷达方程对此进行了描述。
多普勒频移,fd= 2* f0/c = dR/dt = 2*(dR/dt)/λ0= 2*V*余量θ/λ0
哪里 v 是目标使角 θ 相对于位置矢量 (R) 的相对速度。
当目标沿雷达方向移动时,角度 θ 将在 0 到 90 度之间,信号频率 f0将增加量 fd. 当目标远离雷达时,θ 将在 90 到 180 度之间,f0将减少 fd. 当速度垂直时,f不会有变化0和 fd为零。
在多普勒雷达中,可以通过测量多普勒频移和极性来确定距离速率。
基于多普勒的警用雷达
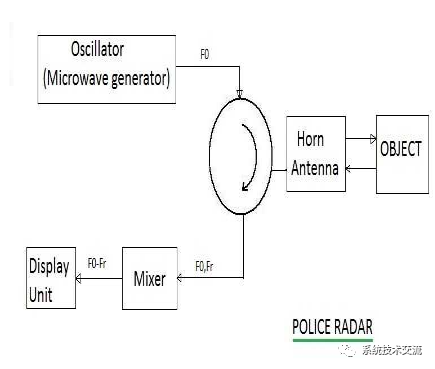
图2描绘了警用雷达中使用的模块。它用于检测和测量移动车辆的速度。如图所示,微波信号发生器用作发射器。这里使用基于冈恩二极管的振荡器来产生微波信号。微波信号通过射频环行器通过喇叭天线传输。传输信号泄漏部分用于 与反射信号进行比较。RF混频器产生这两个输入信号频率的和和差。总和分量被忽略,并使用差分量,这是由于多普勒频移造成的。这种类型的雷达被称为警用雷达。处理后的多普勒频率被馈送到雷达示波器或显示单元。该显示单元提供移动车辆的速度。
以下公式可用于警用雷达计算车辆的速度。
速度(以英里/小时为单位)= 0.26 *(多普勒频移,单位为 Hz)/(微波频率,单位为 GHz)
FMCW雷达系统
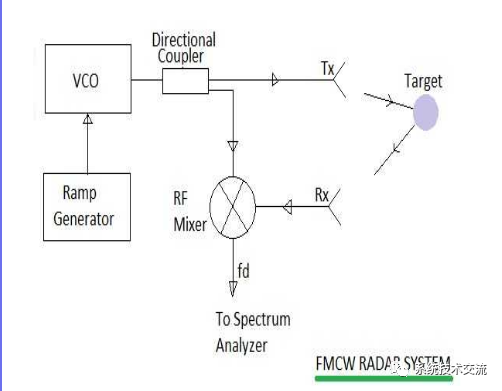
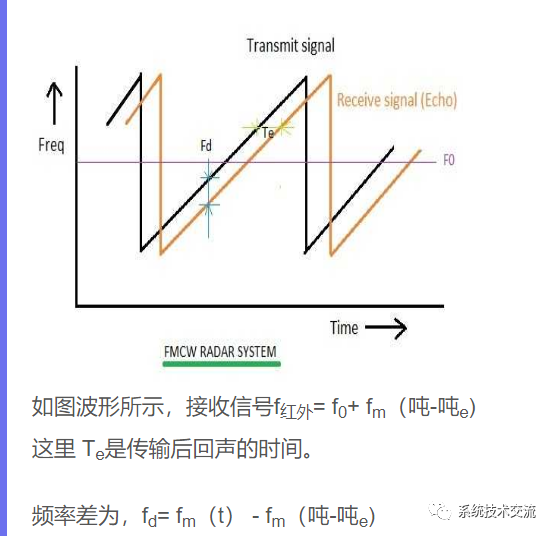
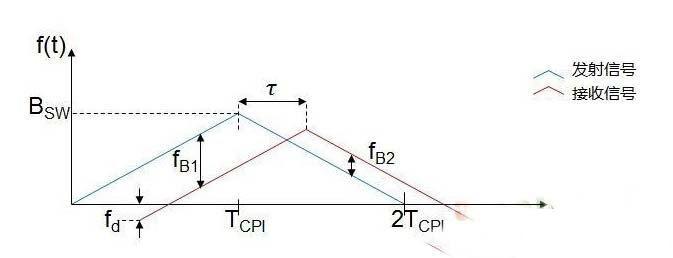
FMCW雷达基本上是一种调频连续波雷达。这里载波信号频率f0由频率 f 调制m(t) 使得发射频率f我可以如下所示。
f我= f0+ fm(t)。
多普勒雷达不用于距离或距离测量。这是由于多普勒雷达中缺乏标记发射和接收时间戳。此时间戳差异用于确定范围信息。为了克服这个问题,利用频率随时间的变化来确定范围。下面的FMCW雷达波形中也描述了相同的情况。
FMCW雷达系统的范围可以通过以下公式给出:
范围= c * fd/2*a;
其中 a= fd/Te
FMCW雷达的工作功率比脉冲雷达低。它用于非常短距离的目标。
探地雷达系统
探地雷达称为GPR是一种开发的雷达 分析地面的内部结构。它采用频率范围从1到约1000MHz的无线电波。它有助于绘制地面结构和地面要素。
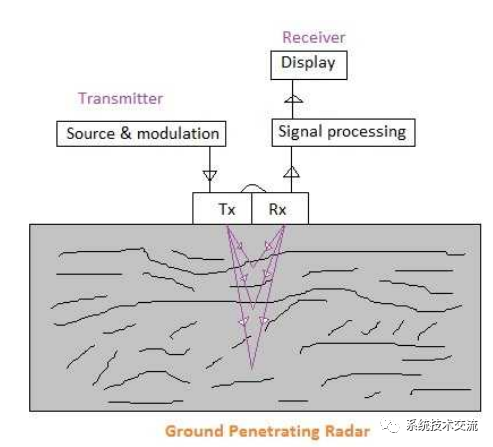
图描述了探地雷达系统使用的典型部件。与其他无线系统类似,该雷达将由发射器和接收器部分组成。发射器部分包括源信号生成、调制和射频上变频,然后馈送 信号到天线以传输到坚实的地面。这与无线系统相反,在无线系统中,信号被传输到空气中。
接收部分由信号采样、信号数字化、数据存储、信号处理显示和雷达示波器显示组成 根据需要提供相关信息。
探地雷达系统的工作原理如下:
• 发射器将RF(射频)信号发射到固体地面
• 检测并记录回波的不同时间实例并利用这些信息 以构建图像。
• 根据信号时间延迟提供示波器的图像信息 和用户的信号强度。
应用
以下是该雷达的应用:
• 测量北极地区和其他地方
的冰雪厚度 • 定位埋在地下
的公用设施 • 评估矿场
• 进行法医调查
• 挖掘考古遗址
• 搜索埋藏的地雷
• 预测雪崩
编辑:黄飞













 工商网监
工商网监
评论