超高速实时运动控制卡XPCIE1032H上位机C#开发(四):板载IO与总线扩展IO的编码器与脉冲配置的应用


关注
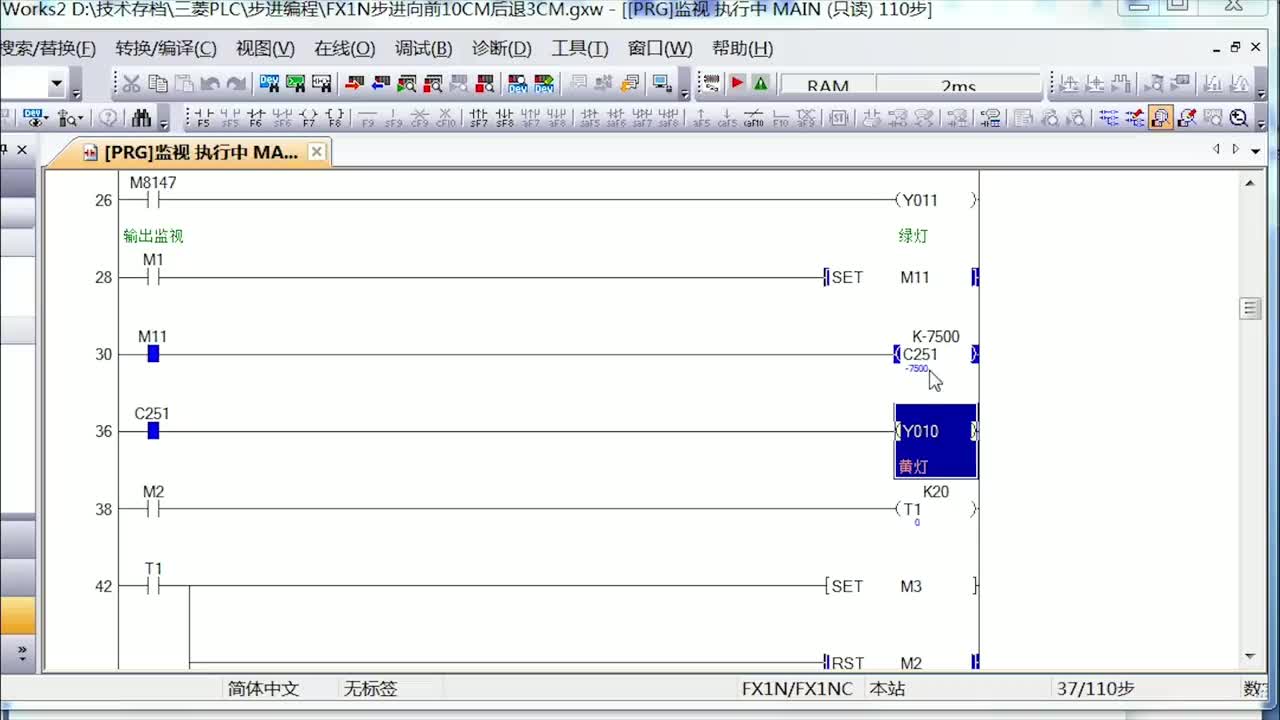
今天这个视频有正运动小助手来讲解一下XPCIE1032H上位机C开发反载io与总线扩展io的编码器与脉冲配置的应用首先在讲解历程前。我们需要了解XPCIE1032H上位机和拓展的轴接口类型,从这里可以得知XPCIE1032H的io规格。XPCIE1032H有两路单端编码器输入和四路单端脉冲输出。从这个表里得知,轴零和轴一可以配置为脉冲,也可以配置为编码器,周二和周三只能配置为脉冲,接下来是,一拓展的规格一。拓展有两种,一种是eio16084,一种是eio24088,他们的区别是,拓展的资源数量的区别?eio16084有四个轴接口,而eio24088有八个轴接口。从这里,这个表得值脉冲轴接口可以配置为差分。脉冲输出和差分编码器输入在了解他们的接口规格后。我们开始历程的讲解,首先,我们打开rt7。点击启动,然后打开我们的历程。点击启动上位机想要控制控制卡,需要连接函数接口来获取。控制卡的连接巨屏,这里我们用lock连接,连接成功后,这里会显示已连接。因为我们这次是讲板载io语总监扩展io。所以,我们需要总线初始化,点击下载。会出现一个打开窗口,我们点击一初始化,点击打开。总线初始化成功后,这里会显示总线初始化成功。节点数量和轴数量都会在这里显示,我把这四个总线轴分别映射到6789这四个轴上通过查看轴类型。会发现65是总线轴,现在我们先开始满载io的轴类型设置。因为轴零可以设置为脉冲轴和编码器,我们用这个轴作为粒子。通过这个表里可以得知,轴类型,一是脉冲轴轴类型,三是编码器轴。我们先把它设置为脉冲轴,点击修改。修改成功后,这个轴就可以正转反转。可以发现,他的命令位置和反馈位置是一样的,现在把它修改为编码器。修改成功后,他的命令位置和返回位置都会变为零。现在我们手动他这个编码器。会发现它的位置发生变化。接下来,我们进行总线扩展,轴的轴类型设置,总线初始化后。扩展的总线轴的轴类型为65,但实质由于是脉冲行驱动器,真实轴类型并不是65。真实轴类型的读取和配置,需要使用pc函数库的数据字典读取和写入接口。拓展了脉冲轴的真实轴类型,设置,通过数据字典6011h设置,24593是十六进制的6011转换成十进,记得来,我们可以通过写入这个位置的数据字典。来修改轴的真实类型。我们先读取一下它原本的轴的真实类型是什么?它的轴的真实类型是,七,是脉冲方向方式不进,或是佛加ej信号输入。我们现在把它修改为脉冲。再重新读取一下,它的真实轴类型就变为了脉冲轴。我们会发现,它正转反转不了,并不是因为它的设置失败,而是说实话,过程中产生了硬线位报警,可以在轴参数窗口中把硬线位。映射编号指向负一,表示不映射,这样就会解除他的。映射报警,我们打开jdv了软件。look连接把轴六字。99的正负线位和原点映射都改为负一。现在线位报警就解除了,现在我们进行正转反转。会发现成功了。接下来,我们把周六的轴类型改为编码器。修改后,我们会发现,反馈位置变为了0,现在我们手动一下这个编码器。会发现反馈位置一直在变化,这说明修改成功。好了,今天正运动小助手带来的讲解视频到此结束。谢谢大家。
合集 · EtherCAT超高速实时运动控制卡
(13集)