目前,中国的车联网发展如何,仅从智能交互角度,如何撬动车联网的蓝海。这里分享了三种流派。
2015-11-27 09:48:18 6535
6535 伺服电机控制方式有脉冲、模拟量和通讯这三种,在不同的应用场景下,我们该如何选择伺服电机的控制方式呢?
2022-08-17 11:01:348014 伺服电机控制方式有脉冲、模拟量和通讯这三种,在不同的应用场景下,我们该如何选择伺服电机的控制方式呢?
2023-05-16 15:56:154406 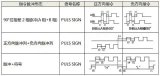
非隔离型开关电源一般有三种基本工作方式,降压型、升压型、极性反转型三种,而其他的都是这三种形式转换而来,例如反激式、正激式、推挽式、半桥式、全桥式。
2023-09-24 11:28:0613770 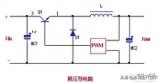
蓝牙技术在我们的生活中扮演着重要的角色,是目前使用最为广泛的近距离低成本无线连接技术。今天,我们就蓝牙定位的三种技术进行简单介绍。信号强度RSSI定位RSSI(信号强度)定位是根据两个设备之间
2024-07-26 08:21:445663 
达130.5%。且VR/AR的消费持续增长,预计2020年达到1433亿美元。其中,硬件、软件和相关服务这三驾马车拉动了VR/AR的全球消费额。尽管当前的VR/AR还受到各种技术的制约,内容相对匮乏,VR/AR生态圈还需要进一步开放与完善。但不可否认,2017年的VR将会重新定义我们未来的生活!`
2017-03-14 14:48:09
端是基极)、共集电极接法(输入、输出的公共端是集电极,如下图一) ;这三种接法不仅在接法上不同,在电流放大倍数、电压放大倍数、输入电阻、输出电阻、相位关系、频率特性等方面均有不同。在实际使用中根据各自特性
2019-12-06 09:01:28
处理的方法,这三种方法可以说是FPGA界最常用也最实用的方法,这三种方法包含了单bit和多bit数据的跨时钟域处理,学会这三招之后,对于FPGA相关的跨时钟域数据处理便可以手到擒来。这里介绍的三种方法跨
2021-02-21 07:00:00
运算放大器进行信号的放大,而不采用三极管独立元件的方式,两者之间有哪些优缺点?4.频率特性好或者差,是基于什么原理分析出来的5.MOS管是否也和三极管一样,存在这三种状态*附件:基本放大电路.rar
2022-09-09 16:14:52
三种常用的嵌入式操作系统——Palm OS、Windows CE、Linux;在此基础上、分析、比较这三种嵌入式操作系统,给出它们之间的异同点及各自的适用范围。1 嵌入式系统与嵌入式操作系统1.1
2021-12-22 07:36:58
三种常见的PCB错误是什么
2021-03-12 06:29:32
在硬件设计中接触最多的电源拓扑应该是降压(Buck),升压(Boost),升降压(Buck-Boost)这三种,本篇文章将介绍下这三种电源的拓扑以及Buck型开关电源芯片各引脚的作用。电源拓扑
2021-10-28 09:33:08
对于Bluetooth BLE CC2540,看到资料上提到了三种省电模式。是否有什么文档可以让我更细致地了解这三种模式。比如说在不同的模式下:1)哪些功能被关掉了;2)对于蓝牙的连接来说意味着
2020-08-27 07:17:31
在我用photodiode工具选型I/V放大电路的时候,系统给我推荐了AD8655用于I/V,此芯片为CMOS工艺
但是查阅资料很多都是用FET工艺的芯片,所以请教下用于光电信号放大转换(主要考虑信噪比和带宽)一般我们用哪种工艺的芯片,
CMOS,Bipolar,FET这三种工艺的优缺点是什么?
2025-03-25 06:23:13
现在ESP32 这三种模式能够共存吗? 以前了解,不是很稳定,现在改善了吗?
2024-06-24 06:40:19
电阻,这三种采样方式都有其优点和缺点,方案的不同,对应的电流处理方式也就不同,系统最终运行的效果可能也会有差异,所以这三种方案也有其适用的场合。那么这篇文章会结合这三种方式来给大家进行相关的分析及总结
2021-03-19 13:46:57
大家好,关于I2S格式,有两个疑问请教一下
我们知道I2S有左对齐,右对齐跟标准的I2S三种格式,那么这三种格式各有什么优点呢?
而且对于标准的I2S格式,32FS传输16bit的数据,48fs传输24bit的数据,最低位会移动到右声道,是否意味着该数据被丢弃了?还是有其他处理方式?
2024-10-21 08:23:14
OPA177的型号里有带E4、G4的,有不带的,请问这三种的区别在哪里?谢谢!
2024-08-29 07:44:03
QSPI特点QSPI三种工作模式
2020-12-31 06:36:55
STM32三种启动方式是什么
2021-12-15 07:16:54
正文不得不提的启动方式STM32支持三种启动方式 1. FLASH启动 2. SRAM启动 3. 系统存储器启动这三种启动顺序决定了上电后第一条指令的位置。如果你选择FLASH启动,则上电复位后PC
2021-08-23 06:03:35
系统复位、电源复位和备份域复位。每一种型号的STM32都包含有这三种复位类型!1.1、系统复位除了时钟控制寄存器 CSR 中的复位标志和备份域中的寄存器外,系统复位会将其它全部寄存器都复位为复位值,只要发生以下事件之一,就会产生系统复位:NRST 引脚低电平(外部复位)窗口看门狗计数结束( WWD
2021-08-02 06:32:00
我买的是一个lpc2131的arm板子然后总是出现以下情况,我用的是jlink,这样之后就没法烧代码了,然后只有用j-tag烧写之后才能重新编码?我用的烧写方式是debugInRam,另外与debuginflash,reinflash这三种方式有什么区别?
2012-02-20 18:34:44
st visual programmer打开的文件格式有.s19, .hex,.sx三种文件格式有什么区别吗?是不是不同芯片的文件格式不一样,还是所有的芯片都可以使用这三种文件格式?
2024-04-28 08:56:39
while的三种使用形式是什么样的?
2021-11-02 08:35:34
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。大多数人想知道的就是这三种控制方式具体根据什么来选择的?
2021-01-29 07:28:36
关于In-Cell、On-Cell、OGS三种屏幕技术的知识点看完你就懂了
2021-06-03 06:22:30
关于TFT-LCD的三种广视角技术解析,不看肯定后悔
2021-06-04 06:09:29
从不同的侧重点给出了几种拓扑,将对其进行分析比较三种拓扑有其各自的有缺点,如何来选择它们?
2021-04-07 06:05:16
,使用文本编辑器进行创建,使用重定向符号进行创建,接下来就演示如何使用这三种方式进行文件的创建。使用touch命令进行文件创建touch命令最初的作用是对文件的“访问时间”或“修改时间”进行修改,...
2021-12-15 08:42:39
做单片机开发时UART,SPI和I2C都是我们最经常使用到的硬件接口,我收集了相关的具体材料对这三种接口进行了详细的解释。
2019-08-02 08:13:39
蓝牙无线组网的优点是什么?常见的三种无线接入方式是什么?蓝牙无线组网原理与上网方案分享
2021-05-26 06:33:11
测四节电池的电压和电流和温度的检测系统的上位机程序,界面可现实检测对象的实时数值和波形曲线图,怎么将混合信号分类成这三种不同数据,具体怎么做!谢谢
2013-05-07 08:45:41
Wideband)技术这个技术也是这几年逐步兴起的。根据UWB的原理,TOA方式的精度相当可靠。时延也短,可以说UWB技术是室内定位界的高富帅了。成为高附加值场景里的不二之选。 总结一下。由于RFID的天线
2018-12-28 14:30:48
编译的三种类型是什么?ARM_Linux制作嵌入式远程调试工具
2021-12-24 06:42:58
原理图的Grid Preset的默认情况下有三种设置,请问这三种设置有什么区别,是怎么使用的
2019-04-10 07:35:06
本帖最后由 一只耳朵怪 于 2018-6-13 16:23 编辑
1 在datasheet中提供了三种外部参考电压,1.024V 1.5V 和2.048V外部参考电压是不是只有这三种,其他的不可以? 参考电压的作用是是什么呢? 是不是用于校正,如果是那如何校正的呢?
2018-06-13 09:12:11
请群主详细解释下这三种启动方式,看了参考资料不是很明白其意!谢谢!
2019-07-17 04:35:12
,ZG_SECURITY_SE_STANDARD,这三种模式有什么区别?在不同应用中该怎样选择?2、ZG_SECURE_DYNAMIC 有什么用,什么情况下需设为1?
2018-08-17 07:32:41
一个循迹小车的程序,编译后出现三种语法错误,见图,需要大神帮助
2019-10-15 22:39:22
运放在电路中主要存在三种应用,放大器,滤波器,振荡器。再这三种应用电路中,运放的两大特点虚短虚断仍然成立吗?
在阻尼振荡器中,工作过程是否按照我描述的这样,在反相输入端加一个近似锯齿波的电流源,正半
2024-01-26 16:18:26
进程类型进程的三种状态
2021-04-02 07:06:39
三电平结构的变频器有一个问题就是中点电位不平衡,在软件控制层面有三种平衡模式,默认模式、比例模式和PI模式,或许叫法有所不同,总之是这三种平衡模式吧,请问这三种平衡模式是什么意思,具体而言有什么不同,这三种模式是如何对中点电压平衡做补偿的?
2024-01-09 16:12:28
BUCK变换器轻载时三种工作模式原理及应用:降压型Buck 变换器在轻载有三种工作模式:突发模式、跳脉冲模式和强迫连续模式。文中详细的阐述了这三种模式的工作原理,同时介绍了
2009-10-27 22:52:13 76
76 三种投影机散热技术是哪三种
如今在日常的学习、工作、生活中,投影机的应用越来越频繁。由于投影机属于高
2010-02-06 10:33:41635 在示波器当中,存在auto、signal、normal三种触发方式,示波器的“触发”就是使得示波器的扫描与被观测信号同步,从而显示稳定的波形。为满足不同的观测需要,需要不同的“触发模式”。示波器的基本触发模式有三种:
2018-11-06 14:31:4331069 电感变压器如何快速的去漆呢?一般在实际的工作中,一般采用手工去皮,电动剥皮,剥离剂剥皮这三种方法来进行去漆,那么这三种那种方法更高效呢?
2018-12-21 14:12:3216972 ,同时在它们身上都产生了很多改进, LCD得到了发展,三种技术之间互相争斗,每一种技术都曾经有段时间因为响应时间的问题而面临过被淘汰的危险,不过每次它们都逢凶化吉,发现一种新的提升方法来重新回到竞争中来。以下文章介绍的是
2019-02-19 12:43:011663 在实现物联网的短距无线通讯技术里面,蓝牙、Wi-Fi、zigbee 是目前应用最为广泛的三种短距无线通讯技术。本文将详细介绍并分析这三种物联网通讯技术的优缺点。
2019-05-12 10:25:3719172 
在实现物联网的短距无线通讯技术里面,蓝牙、Wi-Fi、zigbee 是目前应用最为广泛的三种短距无线通讯技术。本文将详细介绍并分析这三种物联网通讯技术的优缺点。
2019-05-17 14:27:1225816 在实现物联网的短距无线通讯技术里面,蓝牙、Wi-Fi、zigbee 是目前应用最为广泛的三种短距无线通讯技术。本文将详细介绍并分析这三种物联网通讯技术的优缺点。
2019-05-31 10:55:0023574 手机内存到底怎么选?这三种配置最推荐,你选对了吗?
2019-08-28 17:17:1511981 W5100与MCU的连接方式主要有直接总线连接、间接总线连接、SPI总线连接这三种连接方法,不同的连接方法适应于不同的场合,应该按需选择最恰当的连接方式。
2019-09-01 09:49:596202 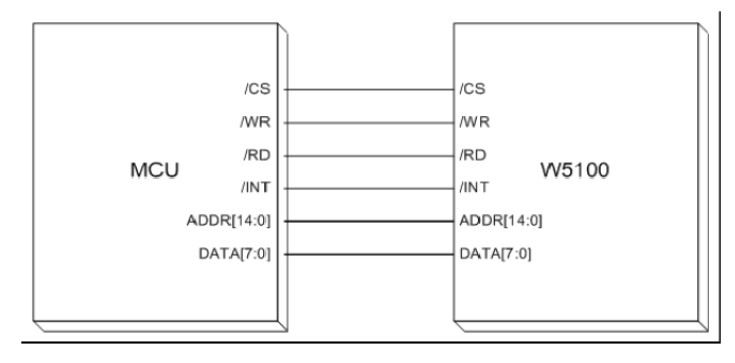
在学电子电路中,要学会分析电路,就从了解电路的三种状态开始。电路有哪三种状态:通路(负载)、短路、开路(空载)三种状态下的电源电压分别是U=E-IR,U=0。U=E,以下内容分别介绍这三种状态的具体情况。
2019-09-13 09:54:00102847 AR、VR、MR技术让我们见识到了科技神奇的同时,也让真实可感的现实世界和无法触摸的虚拟世界的联系更加紧密。三种技术的出现让很多人摸不着头脑,甚至将它们混为一谈。下面就来看看这三种技术到底是什么吧。
2019-10-21 15:56:284677 UWB定位属于高精度室内定位的一种,UWB定位常用的有三种定位算法,包括TWR定位算法、TOA定位
2019-11-01 18:55:1316785 近些年可穿戴设备爆发的一年,功能各异的可穿戴设备层出不穷。华为、三星、接连发布了自己的可穿戴产品,但面对可穿戴设备的集中爆发,我们需要看清的是,目前可穿戴设备是存在三种发展模式的。而从这三种模式,我们或许可以看出未来可穿戴设备的发展方向。
2020-06-13 10:41:561999 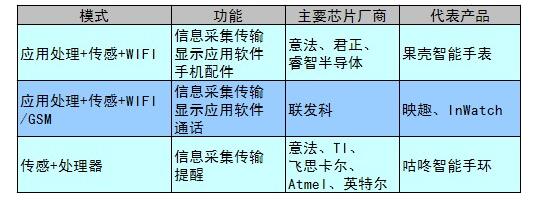
NFC作为一种近年颇受欢迎的近场通信技术,其应用十分广泛。而NFC应用大致可以分为三个基本类型,下面就让小编编带着大家一起走近这三种基本应用类型吧。
2020-09-03 15:14:464529 液晶拼接屏多见的有外拖拼接操控器式、嵌入式以及PCI插卡式这三种拼接办法。
2020-09-10 15:09:489226 提出来。不过,总的来说,现代深度学习可以分为三种基本的学习范式。每一种都有自己的学习方法和理念,提升了机器学习的能力,扩大了其范围。 本文最初发布于 Towards Data Science 博客,由 InfoQ 中文站翻译并分享。 深度学习的未来在于这三种学习模式,而且它们
2020-10-23 09:37:252666 
非隔离型开关电源一般有三种基本工作方式,降压型、升压型、极性反转型三种,而其他的都是这三种形式转换而来,例如反激式、正激式、推挽式、半桥式、全桥式。
2020-11-28 11:53:513340 
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。大多数人想知道的就是这三种控制方式具体根据什么来选择的?
2020-12-14 23:12:306461 伺服电机控制方式有脉冲、模拟量和通讯这三种,在不同的应用场景下,我们该如何选择伺服电机的控制方式呢?
2021-01-20 10:34:5220 一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。大多数人想知道的就是这三种控制方式具体根据什么来选择的?
2021-01-22 06:30:447 非隔离型开关电源一般有三种基本工作方式,降压型、升压型、极性反转型三种,而其他的都是这三种形式转换而来,例如反激式、正激式、推挽式、半桥式、全桥式。
2021-01-29 08:04:3122 伺服电机控制方式有脉冲、模拟量和通讯控制这三种,在不同的应用场景下,该如何确定选择伺服电机控制方式?
2021-02-03 06:46:1238 外媒 Appleosophy 曝光了苹果内部正在验证的三种方法,解决无接口 iPhone 手机的刷机问题。
2021-03-05 16:46:131301 在嵌入式领域,存在着三种处理器通用的架构,PowerPC、X86、ARM,本文将对这三种架构进行对比分析。
2021-03-05 17:39:476302 。如图2.1所示,在相对较高层次对比了三种器件。Zynq MPSoC的PS部分比Zynq的PS部分面积更大,也更复杂。本章,将介绍这三种器件的特点。 2.1 技术时间线 进一步介绍之前,需要指出这三种
2021-04-02 17:20:1418830 
电子发烧友网为你提供这三种特殊PCB走线技巧,你学会多少?资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
2021-04-29 08:41:5535 非隔离型开关电源一般有三种基本工作方式,降压型、升压型、极性反转型三种,而其他的都是这三种形式转换而来,例如反激式、正激式、推挽式、半桥式、全桥式。
2022-02-08 15:21:456 单片机CPU与外部设备交换信息通常有如下几种方式:无条件传送方式,查询传送方式和中断传送方式。我们以单片机与微型打印机接口为例讲述这三种方式。
2022-02-10 11:00:041 开关电源最常见的三种结构布局是降压(buck)、升压(boost)和降压–升压(buck-boost),这三种布局都不是相互隔离的。
2022-03-11 17:00:0212594 实现可编程逻辑电路可以选择三种主要的技术,它们有两种主要的特性:是否可重新编程以及是否易失。我们将介绍三种主要的器件,它们是支持可编程电路的技术基础: 反熔丝、双栅晶体管和基于SRAM的可编程电路。
2022-09-08 10:39:452994 常见的隧道定位分为三种:RFID区域定位、uwb精确定位、ZigBee精确定位。下面给大家详细介绍下这三种定位的应用领域,区别,优势,特点,功能等。
2022-09-30 09:05:294676 Allegro 网络万用表连接在设备和服务器基础设施之间,以查找网络设备的 IP 地址。使用 MAC、DHCP 和 HTTP 这三种协议。
2022-10-17 14:57:381190 的79dB PSRR(1MHz)。一些客户要求将电流提高到200mA以上,同时仍保持低噪声和高PSRR。本文探讨了获得更高输出电流的三种方法,并提供了实用的输入,以帮助您确定哪种方法最适合您的电路条件。这三种方式是:
2023-01-08 15:32:027818 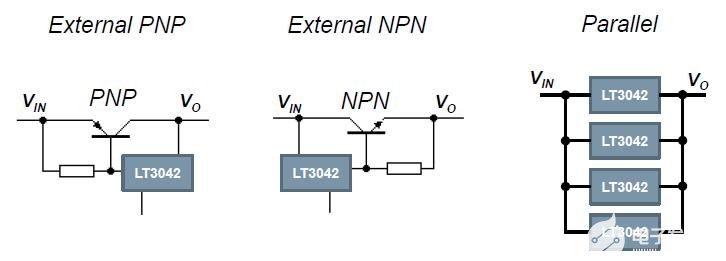
大家都知道电子设备在发展中很容易就会受到干扰,压力传感器模块也不例外。屏蔽抗干扰因素不仅可以保持设备稳定运行,同时还能提升精准度。那压力传感器模块如何实现抗干扰呢?TCOOP建议试试这三种屏蔽抗干扰技术。
2023-02-21 17:33:213193 
目前在人员定位领域,基本运用这几种技术:全球定位系统(GPS)、蜂窝网络定位(基站定位)、蓝牙定位、RFID定位、超声波定位、姿态识别技术等。其中我们挑选出三种应用较为广泛的定位技术进行分析对比,让
2023-04-23 10:06:052465 
Android开发——近场通信技术特点分析及对比三种近场通信技术特点 NFC 主要技术特点 Blue Tooth 主要技术特点 WIFI 主要技术特点 三种技术对比三种近场通信技术的未来应用场
2023-05-19 17:44:420 三种近场通信技术的特点 1、三种类别 1、蓝牙 2、WIFI 3、NFC 2、三种技术的特点以及应用场景 1、蓝牙 2、WIFI 3、NFC特点: 二、三种近场通信技术的未来展望 1、蓝牙 2
2023-05-25 17:20:190 目录三种近场通信技术的特点——①NFC 三种近场通信技术的特点——②WiFi 三种近场通信技术的特点——③蓝牙 未来近场通信技术的应用场景的分析与预测 三种近场通信技术的特点——①NFC NFC
2023-05-18 11:15:042 本文介绍了测量噪声系数的三种方法:增益法、Y系数法和噪声系数测试仪法。这三种方法的比较以表格的形式给出。
2023-05-18 11:02:222048 
的组网能力,可以形成星型网、树型网和网状网等三种ZigBee网络,可以根据实际的开发项目需要来选择适合的ZigBee网络结构进行组网,这三种ZigBee网络结构也各有
2022-05-12 09:40:453698 
本文对ToF、双目视觉、结构光这三种技术展开分析,帮助你了解其各自的特点及应用
2023-07-10 16:04:161882 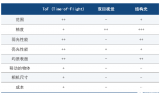
伺服电机控制方式有脉冲、模拟量和通讯控制这三种,在不同的应用场景下,该如何确定选择伺服电机控制方式?
2023-07-26 09:22:202805 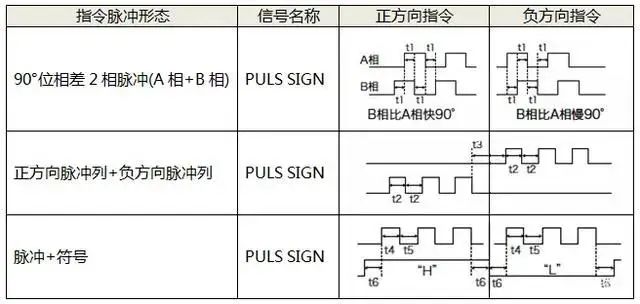
芯片键合技术在半导体制造中占有重要的地位,它为组件间提供了一个可靠的电气和机械连接,使得集成电路能够与其它系统部分进行通信。在众多的芯片键合技术中,Wedge、Ball、Bump Bonding被广泛使用。以下将详细探讨这三种技术的特点、应用以及它们之间的差异。
2023-08-19 10:11:306083 
晶体管的三种基本接法是什么 晶体管是一种半导体器件,是现代电子技术中的重要组成部分,可用于放大、开关和稳压等电路。晶体管的三种基本接法是共射极、共集电极和共基极。下面将详细介绍这三种接法。 一、共射
2023-08-25 15:35:178898 漂移误差、随机误差、系统误差这三种误差到底是怎么引发的?如何对矢量网络分析仪校准呢? 漂移误差、随机误差和系统误差是在矢量网络分析仪(简称VNA)测量过程中可能出现的三种误差类型。它们的引发原因和解
2024-01-19 15:42:163244 晶体管作为现代电子技术的基石,其工作状态直接影响电子设备的性能和功能。晶体管通常具备三种基本的工作状态:截止状态、放大状态和饱和状态。这三种状态不仅决定了晶体管在电路中的行为,也反映了晶体管作为半导体器件的基本特性。本文将详细阐述晶体管的这三种工作状态,旨在为读者提供深入的理解和全面的分析。
2024-05-28 14:53:333692 单片机的三种总线结构包括地址总线(Address Bus, AB)、数据总线(Data Bus, DB)和控制总线(Control Bus, CB)。这三种总线在单片机内部及与外部设备之间的数据传输
2024-09-10 11:32:169480 +4G、4G+蓝牙+UWB+RTK以及5G+蓝牙+LoRa这三种融合人员定位系统在煤矿工厂中的人员定位原理,并简要分析其优势。 一、北斗RTK+蓝牙+4G人员定位系统 定位原理 新锐科创的北斗RTK+蓝牙+4G人员定位系统结合了北斗卫星导航系统的高精度定位能力、蓝
2024-12-24 10:18:481145 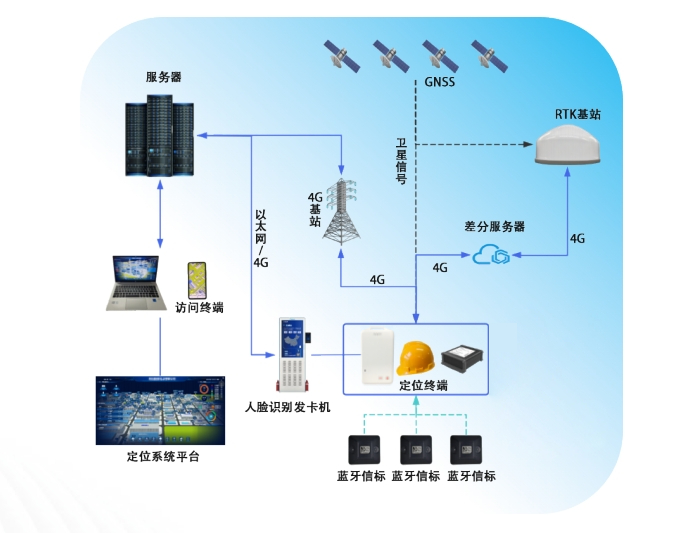
如果想要说明白GaN、超级SI、SiC这三种MOS器件的用途区别,首先要做的是搞清楚这三种功率器件的特性,然后再根据材料特性分析具体应用。
2025-03-14 18:05:172387
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论