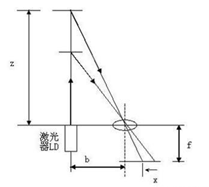
激光三角测距法作为低成本的激光雷达设计方案,可获得高精度、高性价比的应用效果,并成为室内服务机器人导航的首选方案,本文将对激光雷达核心组件进行介绍并重点阐述基于激光三角测距法的激光雷达原理。
2023-12-27 18:20:33 700
700 
本人物流工程专业,现需要做一个关于使用激光雷达(镭神智能LS01C)来实现避障功能的智能小车!不知从何下手,因为缺乏套多方面的知识,望高人指点,不甚感激!
2016-10-11 10:16:45
求一激光测距雷达模块最大测距30~50米即可测量精度10cm(要求可稍稍降低)价格在1000元以内
2015-07-09 16:01:13
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-11 09:21:13
想了解行业国内做固态激光雷达的厂家,激光雷达里面是怎么样的啊
2021-01-17 15:29:39
了概念阶段,发展到了对各项技术的积极研究当中。而其中的某些技术,已经成为科技公司和汽车企业都表示“必须拿下”的关键所在,比如激光雷达。激光雷达有多重要?顾名思义,激光雷达就是以发射激光束探测目标的位置
2017-10-20 15:49:06
激光雷达、激光测距、脉冲测量必配芯片MS1003产品简述MS1003是一款高精度时间测量(TDC)电路,对比MS1002具有更高的精度和更小的封装,适合于高精度小封装的应用领域。MS1003具有
2021-01-24 21:02:44
的雷达,一般会采用相干体制。按应用分类,我们可以分得更多,比如:激光测距仪、激光三维成像雷达、激光测速雷达、激光大气探测雷达,等等。按照距离测量的原理划分,有两种方式:1.一种是TOF技术,即Time
2017-09-19 15:51:15
最为重要的,目前,主流的用于周围环境感测的传感器有激光雷达、毫米波雷达、视觉传感器三种。1.自适应巡航控制系统 Adaptive Cruise Control(ACC)自适应巡航控制系统是一种智能化
2017-10-18 17:18:24
认为是 L3 级及以上自动驾驶必备传感器。激光雷达兼具测距远、角度 分辨率优、受环境光照影响小的特点,且无需深度学习算法,可直接获得物体的距离和 方位信息。这些相较于其他传感器的优势,可显著提升自动驾驶
2021-03-18 11:14:17
定位。对于路径规划和运动控制,最终是结合车辆的 CAN 总线,对车进行控制。在感知方面,我们普遍使用的是激光雷达、摄像头、毫米波雷达三个是作为感知外界物体的传感器。其中,激光雷达可以做物体的识别、分类
2017-09-08 17:24:48
接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。激光雷达主要包括激光发射部分、扫描系统、激光接受部分和信息处理部分,结构较为复杂。从激光雷达的工作来看,主要分成四大部分:1)激光发射部分:激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束
2021-09-13 06:30:11
激光信号,就需要有更优异的处理算法和光学调校。 传统受限于原理,三角测距法的激光雷达都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作的可能性了。 不过,对于RPLIDAR而言并不是如此
2018-02-07 13:40:27
`最近突然对机器人距离探测设备感兴趣就打算着手做个激光雷达玩玩。。。。可以在设计方案的时候发现角度信息很难解决。多以想看看大家有没有做过这方面的。帮忙想下。。。。如果哪位土豪家里有扫地机器人可以拆下,,,,,给大家介绍下,,,哈哈哈。。。。哪位大神如果做过,,,能不能帮帮偶。。。`
2016-04-16 17:45:28
Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念。 激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显: 1
2020-07-14 07:56:45
`1、激光雷达为什么这么贵?激光雷达是一个精密的光学仪器,需要专家级的工程师耗费大量时间调试校正,并且调试校正的时间随着雷达线束的增加,呈几何级数增长。所以产量非常低。价格自然就这么高了。“工业用品
2017-10-16 16:31:32
简单的3D雷达,获取三维数据呢?目前市面上主流的有2种方式:1、采用线状激光器,将原先的一个点变成一条线型光;2、使用一个2D激光雷达扫描,同时在另一个轴进行旋转,从而扫描出3D信息;图片来源于网络
2018-05-11 15:33:44
机遇激光雷达在智能机器生态系统中有很多机遇。与使用二维图像相比,点云能够更容易的被计算机使用,用于构建物理环境的三维形象——二维图像是人脑最容易理解的数据,而对于计算机来说,点云是最容易理解
2017-09-26 14:30:16
地实现多AGV小车的协调控制。 ■激光雷达在AGV小车中的使用 SLAM中可以进行环境信息感知的主要传感器有激光雷达、摄像头等。其中,基于激光雷达的AGV小车自主定位与建图的方法,由于其测量精度高
2018-11-09 15:59:01
有道友能介绍介绍EAI激光雷达吗?
2020-12-31 17:48:20
FMCW激光雷达与dTOF激光雷达的区别在哪?
2021-07-23 13:22:37
污染气体的手段,已成为激光雷达研究中的最重要的课题,因为它关系到我国社会能否持续发展的重大问题。激光雷达是一种主动式的现代光学遥感设备,其基本工作原理与普通雷达类似:由发射系统发送一个信号与目标物质
2016-05-23 14:44:42
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX学习笔记——TOF 高速单线激光雷达 L10_串口中断通信1. TOF 高速单线激光雷达 L102. STM32 Cube MX配置代码配置1. TOF 高速单线激光雷达
2022-03-02 07:19:03
)/显示控制等内容。目前正在研究项目是基于FPGA ZCU102平台的点云算法开发(YOLO-Complex),希望借助北醒TFmini-S 测距/避障激光雷达传感器可以进行特定场景的点云数据采集,以供算法
2020-05-28 17:32:37
项目名称:基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置试用计划:申请理由本人在嵌入式和电路领域有五年多的学习和开发经验,曾设计过北斗和GPS定位救生装置,对定位系统
2020-05-28 17:29:18
项目名称:灭火弹测距试用计划:1.申请理由:为了保证灭火效果,需要在一定距离上起爆灭火剂2.申请计划:设计灭火控制器,预留串口接口在灭火弹上装激光雷达传感器,在4-8m上空播撒灭火剂评估测距精度,近炸效果在可能的情况下对不同速度下的雷达测距进行试验
2020-05-28 17:31:48
` 首先很荣幸能够拿到北醒TFmini-S测距激光雷达的试用资格。刚开始使用,只是简单的用上位机测试了一下,cm级的测试精度,测试效果非常不错。一、外观形状 收到快递发现是非常小的盒子,打开盒子后
2020-06-13 22:08:00
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指出:以下四种
2021-09-01 07:42:19
法原理的激光雷达来说影响更加严重。因为需要能够区分出环境光和激光信号,就需要有更优异的处理算法和光学调校。 传统受限于原理,三角测距法的激光雷达都会给大家一种完全无法抗击环境光照的印象,更不提在室外可以工作
2018-02-02 14:06:27
,甚至前车的下方空间进行探测,为视觉系统提供更丰富的数据。
激光雷达被认为是 L3 级及以上自动驾驶必备传感器。激光雷达兼具测距远、角度分辨率优、受环境光照影响小的特点,且无需深度学习算法,可直接
2023-09-19 13:35:01
。然而,这种方法由于成本低、可实现度高而受到人们的关注。 滨松MEMS Mirror产品 光学相控阵列(OPA)技术,是第三种参与竞争的激光雷达技术,它以可靠的“固定部件”设计而日益流行。它由相干光
2018-09-10 14:10:45
线的固态激光雷达将在今年的第三季度进入大规模的量产发货阶段。但即使还是在样品阶段,LR30的展出已经体现了北醒对于产品应用的细致考虑,本次CES展出的两台LR30,共同覆盖了北醒展位前的全景以及
2018-01-25 09:38:47
的固态激光雷达将在今年的第三季度进入大规模的量产发货阶段。但即使还是在样品阶段,LR30的展出已经体现了北醒对于产品应用的细致考虑,本次CES展出的两台LR30,共同覆盖了北醒展位前的全景以及其他展位
2018-01-26 09:19:09
线的固态激光雷达将在今年的第三季度进入大规模的量产发货阶段。但即使还是在样品阶段,LR30的展出已经体现了北醒对于产品应用的细致考虑,本次CES展出的两台LR30,共同覆盖了北醒展位前的全景以及
2018-01-25 09:36:04
达22m的量程和更为稳定的测距性能。 北醒结合创新的生产工艺和软、硬件多项优化,使得激光雷达真正达到了消费级,可应用到更广泛的领域。 远、准、稳 最远测距可达22m, 高频率的实时测量,具有
2018-01-04 10:21:23
Redis笔记(1)——安装、卸载、三种方法启动Redis,Redis命令使用(干货十足),Redis两种方法设置密码,时间复杂度(更完善哦~)
2020-06-08 16:09:26
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
2018-01-04 10:18:39
线的固态激光雷达将在今年的第三季度进入大规模的量产发货阶段。但即使还是在样品阶段,LR30的展出已经体现了北醒对于产品应用的细致考虑,本次CES展出的两台LR30,共同覆盖了北醒展位前的全景以及
2018-01-25 09:41:33
。 BLDC电机非常适合这些旋转平台,并且可以使用霍尔效应传感器实现BLDC电机换向。图3显示了机械扫描激光雷达的框图。 图3:机械扫描激光雷达框图如何驱动BLDC电机有几种方法可以驱动约40W的BLDC电机
2022-11-03 07:12:38
激光测距原理是什么?如何实现激光脉冲测距雷达系统?
2021-04-29 06:14:35
1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
2021-11-12 08:15:02
单线激光雷达特点:结构简单、扫描速度快、分辨率高、可靠性高、成本低。单线激光雷达实际上就是一个高同频激光脉冲扫描仪,加上一个一维旋转扫描。单线激光雷达虽然原理简单但是可以有效、高频的测试物体的距离
2017-09-25 11:30:10
`TFmini是北醒在推进激光雷达低成本化进程中里程碑式的一步。 产品配以独特的光学、结构和电子设计,使得产品具有低成本、小体积和低功耗三大优点。 产品内置室内外各应用环境的适配算法,可保证产品在
2018-01-04 10:22:39
`TFmini是北醒在推进激光雷达低成本化进程中里程碑式的一步。 产品配以独特的光学、结构和电子设计,使得产品具有低成本、小体积和低功耗三大优点。 产品内置室内外各应用环境的适配算法,可保证产品在
2018-01-11 09:22:38
移动中的行人和人物海报、在三维立体的空间中建模、检测静态物体、精确测距。它是通过发射激光束来探测目标位置、速度等特征量的雷达系统,具有测量精度高、方向性好等优点, 在军事领域以及民用的地理测绘等领域都有
2017-10-23 17:51:41
经过拆解可以看出PIN型固态激光雷达除镜头外都有标准的量产元件可以选择,门槛很低,成本也不高,未来可以取代传统的低像素摄像头。但与摄像头比,激光雷达可以全天候全天时工作,雨雪雾霾,白天黑夜都能胜任。
2020-05-20 06:56:28
图2:安防激光雷达、摄像头、报警器多手段协同激光雷达+安防监控优势近年来,激光雷达技术飞速发展,从简单的激光测距技术,逐步发展出激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术。其工作环境也从
2020-02-29 17:03:44
问题,就是:给了机器人一双“眼睛”。 通过激光雷达,机器人可以向外界发射红外线光源,通过三角测距或者TOF成像原理对机器人进行定位,帮助机器人构建所在环境的高精度轮廓信息,辅助机器人。 通过观察这对CP
2019-02-15 15:12:28
、紧急刹车、车距保持等功能。 综述根据上面的介绍进行简单的总结,三种雷达各自的特点及优劣势如下: 制式参数超声波雷达 激光雷达毫米波雷达 最大距离近远较远距离、角度分辨率一般 很高 高环境适应性易受
2019-09-19 09:05:02
,每一种传感器都有独特的优势和弱点。例如,毫米波雷达可在低分辨率情况下完成测距,且受天气因素影响小;而摄像头有更高的分辨率,能够感知颜色,但受强光影响较大;激光雷达则能够提供三维尺度感知信息,对环境的重构
2017-09-06 11:36:58
。超声波传感器无法探测到障碍物的具体方位信息,而摄像头、红外传感器则容易受到环境光的影响。综合对比,激光雷达方案精度最高,数据可靠性也最好,可以说是AGV避障的最优选择。 然而,目前两种传统AGV避障
2017-12-07 14:47:45
模式,适合于激光雷达和激光测距。主要特点 双通道单精度模式 46ps 单通道双精度模式 23ps 非校准测量范围 3.5ns(0ns)至 16μs 校准测量范围 3.5ns(0ns)至
2021-07-15 19:40:49
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
2021-07-22 09:12:51
空间激光雷达最小接收光功率的计算【摘要】采用信号检测的统计思想,在详细分析雷达接收机各种噪声大小与概率分布、计算空间背景光大小和光谱特性的前提下,基于信号检测理论中的虚警概率和发现概率提出了一种能
2009-05-15 01:20:13
自制低成本3D激光扫描测距仪(3D激光雷达)
2021-03-04 10:51:54
自制低成本3d激光扫描测距仪激光雷达
2020-05-27 16:23:12
值的测量,例如汽车工业中车身模型曲面设计、激光切割、扫地机器人等。 三种方法的量程和精度大致为: 这三种测量方法中,相位测距法的测量速度最慢,一般每秒只能测量几个点到几十个点(TOF distance
2018-09-10 14:21:58
周围障碍物的距离,误差仅为毫米级。商场导引导购机器人这是目前在商场里经常能看到的服务型机器人。该产品采用360度激光雷达扫描测距传感器,可实现机器人自主同步建图及定位导航,适用于室内陪护、酒店前台、商场
2018-09-10 16:32:46
请问激光雷达和激光扫描仪的具体区别在哪儿?
2022-05-13 11:05:19
激光雷达是如何产生的?激光雷达在自动驾驶领域有什么作用?
2021-06-17 07:31:54
源于最古老的雷达技术,只是简单地对激光测距机发出的脉冲信号进行二维扫描,该技术已于上世纪50年代被微波雷达领域所摒弃。而FMCW激光雷达技术是将最先进的微波雷达信号处理理念和激光技术相结合,通过对激光
2020-03-16 19:27:55
的环境感知系统一般由多个传感器组成,包括激光雷达、毫米波雷达、摄像头、GPS 等。其中,摄像头、毫米波雷达、激光雷达是无人驾驶汽车中最常用的三种环境感知解决方案。 摄像头的优点是成本低廉,图像算法
2017-08-21 14:54:32
`历经40余年的发展,激光雷达技术已从最初的激光测距技术,逐步发展了激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术,因此出现了各种不同种类的激光雷达,被广泛应用于各个领域,激光雷达在很多
2018-12-10 14:55:39
请问各位大咖,激光雷达的测量距离能到多少?
2022-10-05 03:18:49
激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。 其实更准确的一个定义是 LADAR:LAser Detection
2017-09-24 09:52:12 43
43 激光雷达目前已经成为了自动驾驶的关键传感器之一,市面上也出现了多种产品选择,但关于激光雷达,一直流传着一些说法,但非专业人士对这些说法一时难以辨别,本文梳理了11个关于激光雷达的“谣言”,将带读者一探究竟。
2019-03-09 10:38:004373 激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势
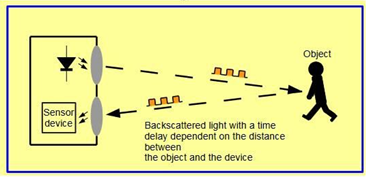
2019-09-26 09:42:157537 就像大家所熟知的那样,路程=速度×时间,激光雷达的测距过程也离不开这个公式。在空间中,激光的飞行速度是已知的3×108 m/s。现有的激光雷达测距方法有很多种,除了直接测量激光脉冲飞行时间的方式,还可以通过对发射激光信号的幅度、频率等参数进行调制来间接的获取目标的距离信息。
2020-09-02 16:56:2920838 据9月3日新闻报道,北醒(北京)光子科技有限公司自主研发的激光雷达测距模组通过相关车级标准,成功被用于某品牌suv乘用车的量产项目。 那激光雷达测距模组在suv乘用车是如何工作的呢?据悉,在搭载
2020-09-17 14:17:23587 音圈模组激光雷达助力国产乘用车。近日,北醒正式发布其激光雷达(LiDAR)测距模组已用于乘用车量产项目,标志着北醒激光雷达的测距模组已符合车级标准,也标志着国内量产乘用车在使用激光雷达技术上迈出
2020-10-12 14:44:56495 据麦姆斯咨询介绍,激光雷达(LiDAR)是一项使用激光实现测距并创建深度图的技术,但给人以昂贵且笨重的印象。MEMS微镜会如何帮助降低激光雷达成本?激光雷达如何实现物联网解决方案?下文将给予相关
2020-11-09 14:25:084728 如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一,按照不同的技术路线,可将机器人激光雷达分为TOF激光雷达及三角测距激光雷达两大类型。
2020-12-26 09:27:153334 激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
2021-03-20 09:09:074522 激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。随着科技的不断发展,激光雷达的应用越来越
2021-03-30 16:37:008080 
目前市场上机械式激光雷达使用了不同的测距原理,主要可分为三角测距和ToF测距两类,使得雷达整体设计在尺寸、性能和成本上有较大差异。 接下来将为大家详细介绍两类测距方式的技术原理,帮助研发人员加深理解,从而选择更适
2021-04-09 11:10:365603 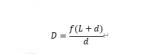
的三维信息,并且具有良好的指向性,抗干扰性强,测距精度高。 直接表现激光雷达系统测距性能的是其中系统级指标,测距能力反映在指标上表现为max测程与测距精度。保证系统的发射机指标与接收机指标为保证测距系统的性能提供了基础
2021-10-08 09:44:395904 
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强
2022-06-20 16:53:4122720 什么是激光雷达(LiDAR)?激光雷达将雷达测距功能与摄像头角分辨率相结合,用来提供准确的深度感知传感,从而完成图像(图1)。
2022-10-21 16:44:355868 激光雷达的本质是一种以激光为辐射源的主动探测器,通过测距和测角来实现探测目的。激光雷达LiDAR(Light Detection and Ranging)是激光探测及测距系统的简称,另外也称 LADAR(Laser Detection and Ranging)。
2022-10-27 11:53:208336 作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分激光雷达都会直接以测量距离作为其主要指标。思岚的激光雷达主要面向服务机器人,12m-40m测距半径完全满足需要。因为在一定成本条件下,适合的测距极限才是王道。
2023-02-09 15:36:291824 激光雷达即激光探测及测距系统,是通过发射激光束来探测目标位置、速度等特征量的雷达系统。按扫描维度,激光雷达可分为一维激光雷达、二维激光雷达和三维激光雷达。
2023-05-10 09:58:335397 
激光雷达,激光测距,激光测速,商用服务机器人,物流AGV车,大屏互动
2022-01-12 18:43:23593 
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累
2022-02-24 12:50:104631 
激光雷达(Laser Radar),又称为激光探测及测距系统(Light Detection and Ranging,LiDAR),是以发射激光束探测目标的位置、速度等特征量的雷达系统。
2023-06-21 11:15:26482 
固态激光雷达通常分为哪三种类型?mems固态激光雷达 固态激光雷达是一种基于激光技术的高精度测量仪器,它利用激光器发射激光束,并通过接收器接收反射回来的激光信号,根据信号的时间差来计算出目标的距离
2023-08-22 16:45:361606 激光雷达的基本构成 激光雷达前景分析 激光雷达基本构成 激光雷达是利用激光信号进行测距的设备,其基本构成包括激光器、扫描机构、接收器、信号处理单元和数据输出单元。 (1)激光器:激光雷达的核心部件
2023-08-23 16:28:082154 晶振是激光雷达系统中的重要组成部分,对于保证激光雷达的测距精度和稳定性起着重要作用。
2023-10-30 17:48:14289 单线激光雷达和多线激光雷达区别 单线激光雷达和多线激光雷达是两种常用的激光雷达技术。它们在激光的发射方式、数据采集、成像分辨率和应用场景等方面存在着很大的区别。 首先,单线激光雷达是指激光雷达
2023-12-07 15:48:331851 激光雷达是一种通过发射激光束来检测目标位置,在进行各种处理后获得目标信息的雷达装置。
2023-12-21 09:25:33407 
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达的硬件要求高,但测量精度比激光三角法要高得多,故多用于军事领域。而激光三角测距法因其成本低,精度满足大部分商用及民用要求,故得到了广泛关注。
2023-12-25 10:04:56189 
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论