
 自动驾驶的眼睛 细述单线激光雷达的作用
自动驾驶的眼睛 细述单线激光雷达的作用
激光雷达的定义
激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:
1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;
2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;
3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;
4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达分类
激光雷达的分类,如果从体制上划分,主要有直接探测激光雷达和相干探测激光雷达。实际上,目前我们提到的,包括自动驾驶、机器人、测绘用到的激光雷达,基本上属于这种直接探测类型的激光雷达。有比较特殊的,比如测风、测速之类的雷达,一般会采用相干体制。
按应用分类,我们可以分得更多,比如:激光测距仪、激光三维成像雷达、激光测速雷达、激光大气探测雷达,等等。
不管是单线激光雷达、多线激光雷达或测绘激光雷达,我们基本上可以将其划分到激光三维成像雷达的范畴。
一个激光三维成像雷达,实际上它需要得到两个核心信息:目标距离信息以及目标角度信息。
如果我们把它的三维坐标准确定下来,我们需要得到它的距离、方位角、俯仰角信息。然后我们根据距离、方位角度、俯仰角度三个信息,将目标的三维坐标点计算出来。
一般而言,通过对编码器进行测量来获取角度信息的技术很成熟。我们更关心的是,激光雷达的距离信息是怎么获取的。
激光三维成像雷达可以通过直接测距、直接测角的技术得到目标的三维点云数据,并且获得的数据本身就是三维数据,不需要通过大量运算和处理才生成目标三维图像,而且激光测距有非常高的精度。
所以,激光三维成像雷达是目前能获取大范围三维场景图像效率最高的传感器,也是目前能获取三维场景精度最高的传感器。
激光测距方法
目前,我们通常能见到的测距方法,从大类上可以分为:激光飞行时间(Time of Fly,TOF)法以及三角法。
激光飞行时间法可以分为两类,一类是脉冲调制(脉冲测距技术),一类是对激光连续波进行强度的调制,通过相位差来测量距离信息的相位测距。
我们能在市面上见到的测距仪,或者说单线、多线激光雷达,基本上都是采用这三类测距方法。
激光脉冲测距技术
激光脉冲测距技术的原理非常简单:通过测量激光脉冲在雷达和目标之间来回飞行时间获取目标距离的信息。这里用了一个基准,就是光的速度。所有的测量都必须有一个基准,对于一束激光来说有两个基准:速度和频率(两个最准的基准),因为 TOF 用的基准就是激光的飞行速度。
上述提到的三种测距方式,我认为技术难点最大的是脉冲测距的方式。但它带来的优点非常明显:测量速度非常快。由于通过高峰值的激光来进行测量,其抗强光的干扰能力非常强。
缺点是测距分辨率提升难度高,探测电路难度大。举个例子,如果要做到相位测距 1.5 个毫米的分辨率,我们就需要把计时时钟分辨率做到 10 个皮秒,也就相当于 100G 带宽,这是一个非常难的技术。
激光相位测距
激光相位测距,比如说常见的手持式激光测距仪,采用的就是相位测距的方式来实现。它主要通过测量被强度调制的连续波激光信号在雷达与目标之间来回飞行产生的相位差获得距离信息。
这种技术最大的优点:测距分辨率非常高,目前一般市面上的相位测距仪都可以达到毫米量级分辨率。
缺点是测量速度比脉冲测距慢,毕竟我们把一个相位差测准,至少要做上几十甚至上百个周期,实际上就相当于把它的测量时间变相拉长,那么它的测量速度相对来说比较低。此外,它的测量精度比较容易受到目标形状运动影响。如果在测量的光斑里,两个目标一前一后,实际上它测出来的具体信息,是这两个目标距离的一个平均值,而不是前一个目标信息或后一个目标信息。
但在脉冲测距里,就很容易将这样的信息分开。比如,一个激光脉冲,如果我们能够把脉冲宽度做到 10 个纳秒,那么我们就可以把一个目标前后相距三十厘米的目标,通过多次回波的方法将其区分出来。
这种方式在相位测距里就很难把它区分出来。因为在测量过程中,它的时间会比较长,目标运动带进来的距离信息,把它引入到测量值里,实际上它测的是一个平均距离信息,而不是实时信息。但是激光脉冲测距,实际上是当前位置实时的信息。
这也是为什么车用或机器人用的激光雷达往往会采用激光脉冲的测距技术,而不采用相位测距技术。
三角法测距
三角法测距就是通过测量激光照射点在相机中的成像位置获得距离信息。三角法测距最大的有优点就是技术难度低,成本也很低,在近距离测距精度也很高。比如工业用可以做到百微米测距精度。
但缺点是,它的精度会随着距离的增加逐渐变差,基本上没法与脉冲测距以及相位测距相比。
另外一点,因为 CMOS 相机必须要用一个连续的激光同步进行照明,它的平均功率相对来说比较低,抗干扰能力会非常强,这种测距方式一般适合室内近距离工作,而不适合在户外强光背景或者室内强光背景下工作。
三角法测距比较适合用于机器人等对性能要求不高的场景。
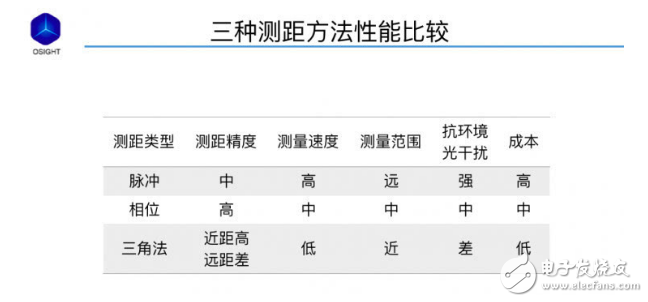
从上图我们可以看出,脉冲测距除了成本和技术难度比较大以外,它在其他各方面的性能都比较优秀。当然,它的测距精度会比相位测距精度略低一些。但是这种精度,按目前的技术,我们基本上可以达到厘米量级,甚至是几个毫米量级的测距精度,基本上能满足我们多场合的使用要求。
我们主要的方向就是用脉冲测距的方式来做单线雷达,包括多线雷达。
什么是单线激光雷达
目前单线激光雷达产品,主要有 SICK 公司和 HOKUYO 公司。
单线激光雷达,实际上是一个高同频脉冲激光测距仪,加上一个一维旋转扫描。单线激光雷达的特点:
1、只有一路发射和一路接收,结构相对简单,使用方便;
2、扫描速度高、角度分辨率高;
3、体积、重量和功耗低;
4、可靠性更高;
5、成本低;
单线激光雷达能干什么?
在自动驾驶领域,我们基本上看到的都是多线激光雷达,单线激光雷达到底能干什么?
如上图,美国 DARPA 自动驾驶挑战赛里的参赛车,第一个是 2005 年斯坦福大学名字叫做 Stanly 的参赛车,这是当年获得冠军的参赛车。另一个是卡耐基梅隆大学的参赛车。
当时他们用的基本上是 SICK 公司的单线激光雷达。特别是斯坦福大学的参赛车,光是上方就装了五个激光雷达,我们可以认为它是多线激光雷达的“鼻祖”,只不过它是用了五个单线激光雷达来实现多线激光雷达的功能。
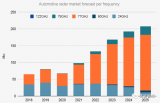
2007 年 Velodyne 推出 64 线激光雷达以后,很多自动驾驶车辆基本上采用了 Velodyne 的产品。但这是不是就是说明,单线激光雷达在辅助或者自动驾驶里没有市场?
我认为不是。因为单线激光雷达有它的特点,比如说,在高重复频率、高角度分辨率上,多线激光雷达很难达到同样的技术指标。
在行人探测、障碍物探测(小目标探测)以及前方障碍物探测等方面上,单线激光比多线激光雷达有优势得多,因为单线激光雷达的角分辨率可以做得比多线激光雷达高,这一点在探测小物体或者行人里非常有用。
这个技术在现在智能机器人、服务机器人上非常有用,而且目前这一块也是比较热的领域。
可能很多人会问一个问题,为什么要用激光雷达来做车道检测而不用相机,ADAS 算法不是非常成熟吗,为什么非得用激光雷达?
这是因为相机特别容易受到背景光或者强光的干扰。比如,我们在林荫大道行走的时候,如果树荫落下斑斑点点的阳光,再结合白色车道线,我们非常难把车道线识别出来,而且识别概率在复杂的光照或者在强光照射条件下,它的识别概率非常非常低,算法也非常复杂。
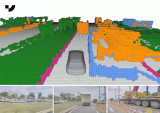
那么,用激光雷达来做车道检测有什么好处?第一,我们用的是红外激光,这种激光本身在红外波段的辐射比可见光要低得多。第二,我们会加一个非常窄的滤光片,把强背景光直接滤除。然后我们再用红外光对它进行探测。这样我们就能获得一张非常高质量的车道线图像,通过图像的灰度,就能非常容易把车道线检测出来。换句话说,用激光雷达来做车道线检测,它的性能会比相机要高。
单线激光雷达在辅助驾驶里的应用是行人探测,实际上这也是一个前向防碰撞的应用,与汽车防碰撞基本类似。由于单线激光雷达的角分辨率可以做到比多线激光雷达高,可在更远的距离提前发现行人,为控制系统或驾驶员留出更多的预警时间。
ACC(Stop&Go)的应用。这个功能在目前中国城市交通拥堵的情况下特别适用,它是通过前向激光雷达直接探测到前面的汽车运动来获得前车的准确距离信息,然后通过控制汽车自动进行跟随。





























评论