DARPA 之前的自动驾驶,由一个大型螺旋型发条弹簧驱动,有先前预定路线。并且自动驾驶的应用也主要集中在军事领域。
转折点出现在 DARPA 挑战赛之后。
1 月 16 日,由雷锋网 · 新智驾主办的 GAIR 硅谷智能驾驶峰会在美国加州 Palo Alto 如期落地。18 位中美顶尖自动驾驶行业嘉宾到场,?7 场主题演讲,2 大圆桌论坛,几乎覆盖了自动驾驶相关的各个话题。从今天起,我们将陆续放出嘉宾演讲与论坛的精华部分,并将在后续的《GAIR硅谷智能驾驶峰会》特辑中送上整场峰会的全部内容。该系列的第一篇,来自DARPA 挑战赛亲历者、Silicon Valley Deep Learning Group CEO Adrian Kaehler。
作为自动驾驶领域绝对的老兵, Adrian Kaehler 的职业生涯介绍理所自然更长一些,他是 Giant.AI 和非营利组织?Silicon Valley Deep Learning Group 的创始人兼 CEO,担任?Applied Minds?副总裁和机器人与机器学习负责人 8 年,并曾在伊朗和阿富汗战争期间为 JIEDDO?开发自动驾驶车辆。 2005 年,斯坦福大学的车队夺得 DARPA 挑战赛冠军,Adrian 便在其中负责计算机视觉系统的开发。
Adrian 的演讲基本以 DARPA 挑战赛为间隔,前半部分,他主要介绍了自动驾驶技术发展的几个重要节点与表现,包括 2005 年和 2007 年的 DARPA 挑战赛,计算机视觉、深度神经网络的发展,之后,Adrian 则重点谈了后?DARPA 时期自动驾驶的发展。
DARPA 之前的自动驾驶
关于自动驾驶的发展起源,Adrian 直接追溯到了 15 世纪。1478 年,达·芬奇(Leonardo Da Vinci)设计出了预编程发条马车的草图,如果研发成功,这辆车就可由一个大型螺旋型发条弹簧驱动,按照预定路线实现车辆的自动驾驶。
90 年代,斯坦福的人工智能实验车(Stanford Cart)率先使用人工智能和机器视觉进行了陌生环境的导航。当时,激光雷达非常昂贵,并没有在自动驾驶中发挥突出作用。多数研究者还是倾向于依靠摄像头和计算机视觉方案完成车辆的自动驾驶,而自动驾驶的应用也主要集中在军事领域。
转折点出现在 DARPA 挑战赛之后。
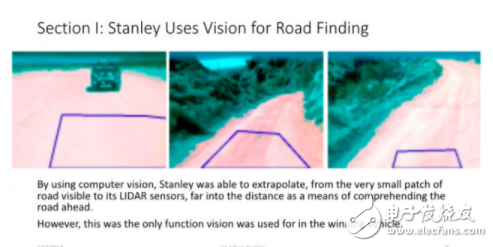
斯坦福大学的参赛车“Stanley”通过视觉进行道路识别,通过激光雷达检测短距离内的道路,并以此预测前方更远距离的路况。当时,一些其它车队也在使用视觉方案,Oshkosh?Defense 的“TerraMax ”就用了激光雷达和立体视觉进行障碍物识别。
2007 年 DARPA 城市挑战赛中,车辆需要展示停车、路径跟踪和车辆交互等功能,车辆视觉变得更为重要,也更广泛地出现在参赛车辆中。
我们都知道,成立于 1999 年的 Mobileye 主要聚焦于 ADAS 系统的视觉开发。他们的技术被用在了 DARPA 城市挑战赛卡耐基梅隆大学的参赛车上,并且取得了非常好的成绩。Mobileye 的早期系统可以提供车道线检测、车道偏离预警、障碍物识别和车距检测功能。2007 年,他们的产品已经用在很多商用车辆上,包括凯迪拉克的?STS 和 DTS。
自动驾驶的第二阶段
2009 年,谷歌开始了自动驾驶研发,他们招揽了 DARPA 挑战赛的很多重要参与者,包括斯坦福的大量人才,而后者不依赖视觉的传统也在谷歌的自动驾驶汽车上得到了延续。不过,在很多任务执行中,摄像头仍是不可或缺的因素。
现在,激光雷达已经成为自动驾驶技术的主流,不过,仍然可以看到很多玩家使用计算机视觉方案。这之中,高昂的成本是很多人对激光雷达望而却步的重要原因。
高校的技术研究已经有了很大发展。DARPA 挑战赛之后这些年,很多研究者整合比赛中的经验,将其中的技术转化成更坚实的理论基础。在计算机视觉方面,类似 Dalal 和 Triggs “HOG”行人检测的重要算法得到改善,新技术发展,车辆识别自行车或其它物体的可靠性也在增加。
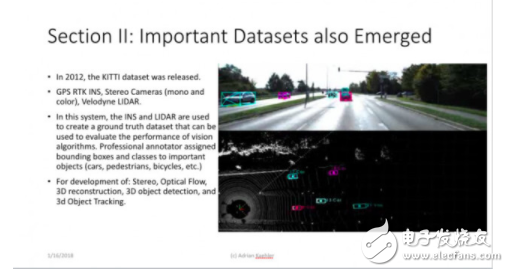
重要的数据集也在发展。2012 年,KITTI 数据集发布,它涵盖了 GPS RTK 惯性导航系统、立体摄像头、激光雷达的探测数据。惯性导航系统和激光雷达可以建立一个地面实况数据集,评估视觉算法的表现。专业的标注者则标定出重要物体(车辆、行人、自行车等)的边界框和目标物等级。这些技术都是发展立体系统、光流、三维重构、三维物体检测、三维目标追踪的重要基础。
KITTI 这类数据集的出现推动新算法更快发展,帮助其进行更高效的比对,现在很多从业者就在努力解决这方面的问题。
2012 年,“AlexNet”在一项重要的计算机视觉基准任务上战胜了其它方法,让神经网络重新回归自动驾驶的版图。并且,深度神经网络几乎打开了解决各种问题的大门,在依赖计算机视觉的年代,这些问题都被认为在几十年之内很难找到解决方案。同时,视觉方案的经济性也开始得到前所未有的重视。一个摄像头最低只要 1 美元,但一个 64 线的激光雷达却要 7 万美金。
计算机视觉和机器学习迅速探索着这项技术的边界,并不断得到新的突破,很多原本认为应该在很多年后才能取得的成果开始定期出现。
下一个主题是 SegNet 分割和?Remapping。原始的?SegNet 主要被用于分割,深度神经网络从场景中学习,之后再对其进行解释。
YOLO 算法目标识别也是非常重要的技术,可以识别图像中的目标,在分类的同时预测边界框。它应用了深度神经网络与传统的概率统计技术,最新版本?YOLO-9k 可以识别 9000 种不同目标物。
视觉的探索没有终点。深度神经网络为很多问题提供了解决方法,Mask R-CNN 的先进算法也在提升,它将对象查找与每个对象的像素标记结合在一起,还可用于人体姿态的评估。
最后,Adrian 表示,虽然自动驾驶的问题很难在短时间内全部克服,但许多重要环节已经得到很好的解决,而这些已足够支撑这项技术投入市场。在其一直关注的计算机视觉方面,他也给出了自己的多项建议,这些建议,以及Adrian 的 40 分钟演讲全文,雷锋网 · 新智驾都将在后续的《GAIR硅谷智能驾驶峰会》特辑中完整送上。
相关推荐
32/64位、高效能低功耗的RISC-V处理器核心领导供货商暨RISC-V国际协会创始首席会员And....
发表于 2023-10-24 16:57•
450次阅读

M2 Pro商用清洁机器人属于iTR机器人iScrubbot系列,是集洗地、吸污、除菌、消毒、降灰等....
发表于 2023-10-24 15:40•
142次阅读
过去三十年的发展,从互联网到无线互联网,到传感器,数字化转型,大数据计算等等。这些逐步增强了软件世界....
发表于 2023-10-24 14:34•
61次阅读
10月,中智行联合曹操出行、先导产投共同上线的全球首款纯路端感知RoboTaxi,亮相苏州市智能车联....
发表于 2023-10-23 15:06•
779次阅读
总的来说,QoS能够提供实时系统所要求的性能、可预测性和资源可控性,并且能够保证发布/订阅模型的模块....
发表于 2023-10-23 11:47•
58次阅读

自动驾驶中的视觉感知是车辆在不同交通条件下安全、可持续地行驶的关键部分。然而,在大雨和雾霾等恶劣天气....
发表于 2023-10-23 10:26•
40次阅读

Adaptive AUTOSAR是一个官方定义的术语,将其描述为 “用于自适应应用程序(ARA)的A....
发表于 2023-10-23 10:23•
43次阅读

毫米波雷达是推动ADAS和自动辅助驾驶发展的关键驱动因素,这种感知方式使得车辆能够感知周围环境并基于....
发表于 2023-10-22 10:33•
673次阅读
10月17日,百度世界大会2023在北京举办。
发表于 2023-10-22 10:30•
758次阅读
近日,创新的激光雷达企业睿镞科技(RAYZ)宣布完成近亿元A轮融资,本轮融资由中芯聚源领投,君桐资本....
发表于 2023-10-22 09:59•
610次阅读
10月,普华基础软件股份有限公司(以下简称普华基础软件)与北京四维图新科技股份有限公司(以下简称四维....
发表于 2023-10-21 09:17•
285次阅读
10月18日,在阿联酋举办的全球性科技展会GITEX Global上,小马智行与阿联酋阿布扎比投资局....
发表于 2023-10-21 09:13•
766次阅读
描述自动驾驶场景的条件是多维度的,包括:相机参数、物体框、路面地图以及对场景属性的语言描述(比如天气....
发表于 2023-10-20 16:18•
77次阅读
汽车数据采集是指通过车辆搭载的传感器、摄像头、雷达等设备收集车辆周围环境、车辆状态和驾驶行为等数据。....
发表于 2023-10-20 12:48•
80次阅读

罗德与施瓦茨(以下简称"R&S公司")的雷达测试系统通过模拟真实的驾驶场景,从而测试基于雷达的高级驾....
发表于 2023-10-20 09:48•
479次阅读
近日,AI驱动的自动驾驶全栈创新服务商上海智驾汽车科技有限公司(下简称“智驾科技MAXIEYE”)与....
发表于 2023-10-19 16:34•
350次阅读
智慧灯杆近几年中标项目和项目金额均呈现大幅度提高的趋势,2023年上亿级项目占比为10%左右,百万级....
发表于 2023-10-19 16:32•
82次阅读

g42是总部设在阿联酋(uae)阿布扎比的公司,除了人工智能外,还进军云计算(cloud compu....
发表于 2023-10-19 11:43•
236次阅读
感知算法升级是L2级向L 3级智能驾驶系统跨越的关键。与传统2D+CNN算法相比,BEV+ Tr....
发表于 2023-10-19 09:53•
36次阅读

规控决策在自动驾驶领域的重要性不容忽视,因为它直接影响到自动驾驶技术实际应用的成功与否。首先,规控决....
发表于 2023-10-19 09:37•
40次阅读

特斯拉 FSD 系统已储备海量数据,人形机器人与电车共享数据源。 电车传回的数据与场景仿真生成的数据....
发表于 2023-10-18 15:25•
364次阅读

IPU03满足车规要求,操作系统采用QNX Safety OS,MCU端采用包含Safety组件的A....
发表于 2023-10-18 11:26•
266次阅读

特别是最近对人工智能(ai)的负面信息较多,从外部对ai的后续增长力,而且受到了质疑,欧盟(eu)....
发表于 2023-10-18 11:25•
252次阅读
机器视觉系统在半导体器件制造中有着广泛的应用;事实上,如果没有机器视觉,计算机芯片的产量将会显著降低....
发表于 2023-10-18 11:21•
26次阅读
自动驾驶技术带来了许多便利,但也带来了数据隐私和安全挑战。保护自动驾驶系统中的数据安全和隐私性至关重....
发表于 2023-10-18 11:10•
48次阅读

图像传感器相当于汽车的眼睛,支持 ADAS 功能,例如车道偏离警告、行人检测和紧急制动。它们帮助汽车....
发表于 2023-10-18 10:54•
35次阅读

2023年10月16日,奇异摩尔(上海)集成电路设计有限公司,因 Chiplet 及 互联领域的技术....
发表于 2023-10-18 09:39•
211次阅读
10月12日,2023第二届中国未来交通产业发展峰会在深圳成功举办。主线科技申报的《AiTrucke....
发表于 2023-10-17 18:42•
53次阅读

文章来源:虹科自动驾驶> 近年来,随着汽车电子系统的升级,人们对联网智能汽车的需求不断增长,高级驾驶....
发表于 2023-10-17 10:38•
52次阅读
端到端自动驾驶是自动驾驶技术的重要发展方向之一。而要实现端到端自动驾驶,离不开高精度3D信息输入....
发表于 2023-10-17 09:53•
537次阅读
如今,追求功率密度和效率是当今众多行业创新的最大动力,包括数据中心、可再生能源、消费电子产品、电动汽....
发表于 2023-10-17 09:26•
18次阅读
近年来,一些端到端学习方法被提出以增强六自由度物体定位的鲁棒性,包括:直接回归几何参数;采用渲染 -....
发表于 2023-10-16 17:13•
140次阅读

本文将对激光雷达、摄像头以及毫米波雷达等主流传感器、各自动驾驶公司的解决方案以及传感器市场格局作介绍....
发表于 2023-10-16 11:47•
70次阅读

郭明錤表示,小米汽车首款预计将在2024年发售,出货量预估5–6万部,关键卖点为自动驾驶、软件生态、....
发表于 2023-10-16 11:36•
324次阅读
无人驾驶汽车是一种智能汽车,也可以称之为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来....
发表于 2023-10-16 11:26•
73次阅读
无人驾驶汽车在实现自主驾驶的过程中面临。着许多安全挑战,如环境感知不准确、障碍物识别错误、路径规划不....
发表于 2023-10-16 11:21•
61次阅读

东风悦享相关负责人表示,无人驾驶巴士搭载14级自动驾驶和5g,这两套平行的方案融合化和共享化的智慧交....
发表于 2023-10-16 11:17•
220次阅读
此外,广汽集团日前子公司广汽资本有限公司与广州开发区投资集团有限公司按同等比例共同出资规模不超过1亿....
发表于 2023-10-16 10:47•
639次阅读
新能源电动汽车发展如火如荼,伴随而来的是汽车的智能化时代,智能化离不开网络,汽车内部也需要一个高速的....
发表于 2023-10-16 10:43•
57次阅读
据英特尔中国透露,极紫外光刻技术正在驱动着算力主导着ai、先进移动网络、自动驾驶及新数据中心和云应....
发表于 2023-10-16 10:08•
286次阅读
图像传感器相当于汽车的眼睛,支持 ADAS 功能,例如车道偏离警告、行人检测和紧急制动。它们帮助汽车....
发表于 2023-10-16 09:18•
53次阅读

市场研究机构IDTechEx指出,随着硅基器件尺寸逼近物理极限,硅柔性化处理已日趋接近天花板;碳基材....
发表于 2023-10-15 11:57•
144次阅读

目前,智能座舱正处于中级阶段向高级阶段过渡的关键时期。为了实现更高级别的驾驶体验,汽车行业必须突破现....
发表于 2023-10-15 10:07•
50次阅读

对于努力将自动驾驶汽车(AV)引入现实世界道路的汽车制造商来说,安全驾驶是一项基本任务,对于自动驾驶....
发表于 2023-10-13 15:33•
69次阅读
接下来,我们需要找到一个最佳起始点来寻找属于左车道线的像素和属于右车道线的像素。一种有效的方法是生成....
发表于 2023-10-13 15:25•
37次阅读

汽车网关是汽车架构的核心部分,其作为整车网络的数据交互枢纽,承担着不同总线类型之间的协议转换工作。当....
发表于 2023-10-13 11:14•
78次阅读

全球最大规模、最具影响力的测量测绘与地理信息领域展会INTERGEO2023于10月10-12....
发表于 2023-10-13 10:41•
259次阅读
国庆前夕,“上海设计100+”和“设享奖EDW”两项产品设计大奖的获奖榜单先后揭晓,深兰科技出品的计....
发表于 2023-10-12 16:03•
287次阅读
从技术层面来说,由于自动驾驶感知硬件和深度学习的缺陷,现在高速自动驾驶的发展离不开高精度地图的支持,....
发表于 2023-10-12 14:43•
123次阅读
纽劢科技官方消息指出,根据新的融资落地nullmax正式进入新的发展阶段nullmax有序扩大团队规....
发表于 2023-10-12 14:23•
452次阅读
人工智能按其模型可以划分为决策式人工智能和生成式人工智能。决策式人工智能是一种用于决策的技术,它利用....
发表于 2023-10-12 09:57•
48次阅读
公司中国子公司“智加科技”是中国国内工作将重点放在通过自由贸易协定为中国市场开发自动卡车驾驶的车辆,....
发表于 2023-10-12 09:45•
232次阅读
继去年12月宣布获得北汽极狐两款车型量产定点,本月,自动驾驶新势力Tier 1魔视智能MOTOVIS....
发表于 2023-10-12 09:04•
525次阅读
2023年10月11日,北京金秋时节,第九届HAOMO AI DAY如期而至。本届HAOMO AI ....
发表于 2023-10-12 08:57•
951次阅读
BEV是一种将三维环境信息投影到二维平面的方法,以俯视视角展示环境中的物体和地形。在自动驾驶领域,B....
发表于 2023-10-11 16:16•
125次阅读

1、介绍
近年来,自动驾驶汽车不断走进我们的视野中,面向自动驾驶的目标检测算法也成为了国内外的研究热点之一。安...
发表于 2023-03-06 13:55•
466次阅读
今年全球规模最大、影响力广泛的国际消费电子展(CES)全面回归线下,在美国拉斯维加斯开展为期四天。作为SoC设计...
发表于 2023-02-09 14:10•
236次阅读
FP-AI-VISION1是一款STM32Cube功能包,其中包含基于卷积神经网络(CNN)的计算机视觉应用示例。...
发表于 2022-11-29 06:40•
122次阅读
Transformers已成为计算机视觉最新进展的核心。然而,从头开始训练ViT模型可能会耗费大量资源和时间。在本文中旨在...
发表于 2022-11-24 14:56•
704次阅读
要实现汽车自动驾驶,需要消除很多法律、社会和结构障碍。尽管几乎我们所有人都在科幻小说或电影中见识过“自动驾驶”...
发表于 2022-11-22 06:43•
134次阅读
原作者:小圆
发表于 2022-10-31 18:10•
2969次阅读
1、如何在深度学习结构中使用纹理特征
如果图像数据集具有丰富的基于纹理的特征,如果将额外的纹理特征提取技术作...
发表于 2022-10-26 16:57•
2239次阅读
1、YOLOv6中的用Channel-wise Distillation进行的量化感知训练来自哪里
知识蒸馏 (KD)已被证明是一种用...
发表于 2022-10-09 16:25•
3780次阅读
单应性矩阵计算函数与应用
OpenCV在通过特征描述子完成描述子匹配之后,会得到一些关键点对,我们会把这些关键点对...
发表于 2022-09-26 16:08•
1843次阅读
描述
单片机遥控船
发表于 2022-08-17 07:31•
1054次阅读

 自动驾驶的发展起源以及DARPA时的计算机视觉
自动驾驶的发展起源以及DARPA时的计算机视觉










 工商网监
工商网监
评论