
 什么是物流科技 自动驾驶技术的加持又将带来什么变化
什么是物流科技 自动驾驶技术的加持又将带来什么变化
2018 全球人工智能与机器人峰会(CCF-GAIR)在深圳召开,峰会由中国计算机学会(CCF)主办,雷锋网、香港中文大学(深圳)承办,得到了宝安区政府的大力指导,是国内人工智能和机器人学术界、工业界及投资界三大领域的顶级交流盛会,旨在打造国内人工智能领域最具实力的跨界交流合作平台。
在峰会的智能驾驶专场上,PlusAI(智加科技)的工程副总裁付强发表了题为“自动驾驶与物流科技”的演讲,分享他对自动驾驶商业落地的一些观点。
PlusAI成立于2016年,是最早获得美国加州路测牌照的企业之一,目前,PlusAI在硅谷、北京、上海、西安都设有运营或者研发中心,并且与斯坦福大学和西安交通大学建立了合作关系,今年4月、5月PlusAI分别联手一汽和苏宁进行了港口和仓到仓的自动驾驶演示。
以下是演讲全文,新智驾在不改变原意的情况下进行了编辑:
首先带大家回顾一下什么是物流科技。
物流产业在我国,尤其是改革开放以来,在我们国家走向市场经济的发展过程中,一直扮演非常重要的角色。现在物流占全国GDP的比重大约是16%,大家平时的吃穿住行都离不开物流的参与。如何通过物流科技去提升物流的效率就变得非常重要。
物流经历了人工生产和机械化的过程,现在已经进入了一个自动化,甚至智能化的阶段。所谓机械化,不过是采用大量车辆,原来用木牛流马变成了在汽车、火车和飞机、货船等等。但自动化的过程则产生了许多新的技术。比如在天猫、京东上购物,系统能够迅速识别订单,自动将货物送上传送带进行打包,然后送到每个人手中。可能今天晚上11点下的单,明天一早就能拿到。
智慧化则是物流科技新的演进方向。因为越来越多的互联网或者具有人工智能背景的公司纷纷开始涌入,为物流行业带来很多智慧化的改变。
具体来讲,从最左侧的供货商到最右侧的消费者,在不同的阶段,物流科技智慧化过程大概渗透了三个环节:
在末端的是配送,现在配送已经有了许多自动化方式,有些物流公司也在强调最后一公里,即在配送的过程中,通过无人机、快递柜或者自动驾驶配送车完成最后一公里。
而在中间的,是仓储,现在,许多智慧化的工作集中在仓储,其中跟自动驾驶比较相关的是AGV,在仓库里可以实现局部自动驾驶,完成货物在仓库内的移动。另外,基于RFID的技术、分拣、包装、识别等,现在都应用得非常广泛。
而从供货端开始的运输,则是PlusAI比较相关的一个环节。这一环节,除了车货匹配、无车承运人、新能源汽车以外,很重要的一点就是无人驾驶。这一环节的运输过程更多的是指仓对仓的运输。货品从供货商运输到消费者的路程中,不可避免会有从一个仓库运送到另一个仓库的过程,这里存在着复杂的场景。例如从仓库运输到高速上,最终运送到另一个仓库或者一个集散点,这就是一个典型的仓对仓的物流。
针对物流长途干线运输过程,有机构进行了以上成本拆分(如上图)。
我认为自动驾驶在物流的中运输能够取得较大成果的原因是,在进入经济领域之前,首先自动驾驶能让运输更加安全。
提到重型卡车,大家的第一反应可能就是网上流传的那些非常惨烈的交通事故,大货车一出事故就非常严重。据我自己走访的统计,在大货车的交通事故中,可能有一半以上是由疲劳驾驶造成的。因为大货车司机一天要驾驶很长的时间,因此多少会产生疲倦,导致反应变得迟钝,陷入间歇性的精神不集中,这些可能是造成事故的主要原因。
而自动驾驶,大家可以想象,算法是不会疲劳的,一旦我们证明算法的可行性,是一定不会存在随着时间的增加效果有所衰减的状况的。所以,需要强调的是,自动驾驶更安全。
除了安全之外,自动驾驶还能降低成本。物流干线运输的成本。很大一部分是来源于运输费。而自动驾驶却能节约燃油。通过改变整流罩和改装的办法,可以实现节油,这是一方面。另一方面,有统计表明,一个有经验的司机比一个新手司机省大概15%的油。老司机对线路比较熟悉,哪个地方有转弯、下坡他都比较熟悉,因此能够提前控制,从而节省燃油。自动驾驶也可以实现接近老司机的使用成本。
另外一点是节约人力,现在,很多长线运输通常是采用多名司机轮流驾驶的方式,避免产生驾驶疲劳的问题。而L4级的自动驾驶,即使是在高速上的实现,一名安全员也就够了,显著节约了人力。
我们曾经与苏宁物流合作过一个项目,打造了一辆自动驾驶卡车,希望一方面减少了交通事故,另一方面能减少碰瓷的可能。
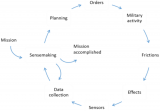
接下来讲一些自动驾驶技术上的东西。自动驾驶大体上分成这几个模块:
首先是传感器,激光雷达就是一种传感器,它好比人的眼睛、耳朵。传感器收集周边感知的信息,然后通过感知算法,将这些信息抽象成计算机可以理解的概念。让系统识别物体、车道线、红绿灯,再决定该如何行驶。定位则是向系统提供具体的位置信息,距离目的地的路程。
有了定位和感知之后,就需要进行道路的规划。A点走到B点,应该走哪条路,是否在要立刻变道,是否要减速绕行等。规划之后的控制,则是将规划的结果转化成给汽车控制系统的指令,进行加速、减速,调整方向盘等。这严重依赖于车载平台,实现它的线功能。
接下来进入一些稍微细一点的领域,环境感知中的人工智能。
感知大体上是这样,自动驾驶车辆能够感知到周围的车,判断出哪些有碰撞的风险,哪些没与。自动驾驶车还能感知到了周围车辆的速度,与周围车的距离、车道线等等,这是一个简单的感知。
人工智能在感知系统上是有很多应用的。在自动驾驶这个领域,我首先想讨论的就是大数据。大家知道在自动驾驶领域,数据量是很大的,一台车行驶几公里后,就积累了大量的视觉数据。大数据强调的是规模。如何让大数据达到规模呢?行业中大体有两个方向,一个是追求一致性,一个是追求通用性。
所谓追求一致性,就是所有积累到的大数据,尤其是环境感知数据,都是用同一款摄像头,安装在同一个位置产生的。这样保证了所有的数据都是高度一致的。接着,使用这种高度一致的数据做训练,最后量产的时候,也同样要求每一辆车将同样的摄像头安装在同一个位置,所有的光圈、焦距我都调校一致,最后也能够取得一个比较好的成果。这样做固然有其优点,但是或多或少会产生一些过拟合的问题。
还有一个是通用性,相信诸位在学习驾驶的时候,坐在车内,还是能够识别车道线、红绿灯的,因为大家在车外的时候就已经能识别这些东西了。当人类在识别车道线、障碍物的时候,是不需要调节光线、焦距的,即使是看照片,不同的摄像头,参数差距很大,摄像视角也不同,人类能识别出物体。所以,在自动驾驶领域,更多的时候应该强调数据通用性。
在采集训练数据的时候,我们不光有自采的来自不同摄像头数据,也采取了来自合作伙伴的数据,甚至是自公开资料,比如说YouTube上的行车记录仪数据。通过合理的标注的方式进行标注,这样就能够保证最终的模型,相比起一些过拟合的情况,能够有更好的通用性。不会出现当摄像头的生产制造工艺出现了偏差,或者焦距、可视角度不一样,或者安装位置的改变,就无法识别的情况。
大家看到现在很多的相关事故,自动驾驶失灵的原因就是一致性做得太强,通用性做得不够。当过多地告诉计算机高度一致的信息的时候,当这个算法处理稍微不一样的数据时,就可能会失灵,与其这样,我们不如更多地强调通用性。而研究人工智能的目的。就是让它更好地模拟人类思考、感知社会的方式。
第二点想要讨论的,就是计算的开销。精确度是现在很多算法追求的指标,但延迟也很重要,现在很多成熟的公司也都注意到了这一点。实际上,在驾驶的过程中,尤其是在高速的场景中,几十毫秒的延迟就会产生不同的结果,所以在算法的考虑上,在精度要达到要求之外,还要降低计算的开销。这其中还有很多计算加速的功能,应该如何建好,如何挖掘也非常关键。计算的精度至少要和它的算法感知的精准度同等重要。
第三点想要讨论的,是成本的控制。我们的计算单元、感知传感器要达到何种程度,才能够保证在同样的精准度下,数据都能跑通,而且不失准确性,同时把成本控制在范围之内。
以上三大点是我们在自动驾驶上的一些思考,这也是需要行业人士应该花时间解决的问题。
我们的数据覆盖了中国和美国都绝大部分省市和州。在中国的省级行政单位和美国的州级行政单位我们都有数据,这些数据的采集是非常大的工作,并不是靠自建一个车队完成的。
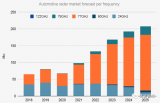
再来看看多传感器融合,这里举一个我们遇到的例子,这个也是用激光雷达、摄像头和毫米波雷达的方案。现在很多车厂在制作紧急制动的时候,更强调毫米波雷达的功能,但对于中距离雷达来说,例子中的物体有点远,探测不到,对远距离雷达来说,其视角比较窄。不管是通过视觉还是通过激光雷达,都可以对物体的检测产生一个很好的弥补。
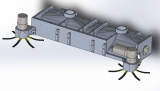
多传感器不光是传感器的冗余,从功能安全的角度出发,当有一个传感器不能工作,即使是低成本传感器组合,也能够达到规避风险的目的,实现真正安全的自动驾驶。只要采集的数据足够多,这种说法是能够被证明的。
我们采用的是前视为主的多传感器融合的技术,选用了成本比较低的摄像头。当有正向的阳光摄入时,会有一道炫光,这时候我们可以进行动态的调整,提升毫米波雷达在感知中的比重,降低摄像头的比重。当回到正常的光线中时,再将比重调回来,实现动态的对多传感器融合算法的调整。
再回归到自动驾驶与物流这个话题。回顾一些大事,2015年的时候,Uber首先实现了无人驾驶货车的应用,用货车运输了一车啤酒;2017年,特斯拉也发布了L3级的卡车;2018年4月,我们和解放联合发布了解放最新一代卡车J7。5月份,我们和苏宁也发起了仓对仓物流的实现,在这个场景中,我们实现了从苏宁的一个仓到另一仓的全自动化,当然,在离开这个仓库之前,我们配了一名司机。


































 工商网监
工商网监
评论