 电子发烧友App
电子发烧友App


移动机器人路径规划是机器人学的一个重要研究领域,也是人工智能与机器人学的一个结合点。不论是哪种类别的移动机器人,都要求根据某一准则(如行走路线总长度最短,能量消耗最少等),在工作空间中沿一条最优(或次优)的路径行走。
路径规划的典型方法有图搜索法、栅格法、人工势场法等,这些算法都有一定局限性,易陷入局部最优解,而遗传算法在解决非线性问题上具有良好的适用性,已成为路径规划中使用较多的一种方法。但是标准的遗传算法本身也存在着早熟,易陷入局部最优解等缺陷,不能保证对路径规划上计算效率和可靠性的要求。为了提高路径规划的求解质量和求解效率,提出一种基于预选择机制小生境技术的改进遗传算法,并将其应用于移动机器人的路径规划,采用化复杂的二维坐标为一维坐标的编码方式,有效降低了遗传算法的搜索空间;根据移动机器人的行走特点,设计了自适应交叉算子、自适应变异算子、插入算子、删除算子、扰动算子和倒位算子。通过计算机仿真证明了改进后的遗传算法明显提高了搜索效率和收敛速度,并能保证收敛到全局最优解,克服了标准遗传算法的缺点,为机器人快速寻求一条无碰的最优路径。
1 基于遗传算法的机器人路径规划算法的改进与应用
本文的移动机器人路径规划,目标是在一幅已知障碍物分布的二维地图上寻找一条最优路径,使其到达目标点的距离最短,同时尽可能地使其与障碍物的距离最大化。为了简化讨论,将移动机器考虑为一个质点,而障碍物的边界向外扩张,这是移动机器人的最大安全距离。
1.1 基于预选择机制技术的小生境遗传算法机理
由于简单遗传算法是一种随机的方法,旨在对多个不同的个体进行隐并行寻优,其运行过程和实现方法在本质上仍是串行的,这样的进化运算过程相对缓慢;同时,基本遗传算法常在各个个体未达到最优解之前就收敛于一个局部最优点,从而导致染色体趋于一致,即产生“早熟”现象。为了克服这些不足,引入了小生境遗传机理,用基于预选择机制技术的小生境方法维持群体的多样性,避免群体内个别个体的大量增加,实现解空间内对局部最优解和全局最优解的寻优。
小生境技术就是将每一代个体划分为若干类,每个类中选出若干适应度较大的个体作为一个类的优秀代表组成一个种群,再在种群中以及不同种群之间,通过杂交、变异产生新一代个体群,同时采用预选择机制完成选择操作。基于这种小生境技术的遗传算法,可以更好地保持解的多样性,同时具有很高的全局寻优能力和收敛速度。
在预选择机制中,只有在子串的适应度超过其父串的情况下,子串才能替换其父串,进入下一代群体。这种方式趋向于替换与其本身相似的个体(父与子之间的性状遗传),因而能够较好地维持群体的分布特性,即使在群体规模相对较小的情况下,仍可维持较高的群体分布特性。具体算法的实现步骤如下:
(1)初始化(建立初始群体,确定遗传参数);
(2)计算个体的适应度;
(3)遗传操作(选择、交叉、变异);
(4)比较子串和父串的适应度大小,如果子串的适应度高于父串的适应度,就替换父串;否则维持父串不变;
(5)如果没有满足算法的终止条件,则返回第(2)步;否则,算法终止。
1.2 路径编码
基因的编码方式确定了问题在遗传算法中的表现形式,也决定了所采用的遗传进化操作。每个染色体表示为给定符号集中的字符组成基因串。在早期的遗传算法中,符号集仅限于二进制数,因此遗传基因型是一个二进制符号串,其优点在于编码、解码的操作简单,交叉、变异等的遗传操作便于实现;缺点是不便反映所求问题的特定知识,以及对一些连续函数的优化问题等。由于遗传算法的随机特性使得其局部搜索能力较差,对于一些要求多维、高精度的连续函数优化,二进制编码存在连续函数离散化时的映射误差,当个体编码串较短时,可能达不到精度要求;当个体编码串较长时,虽然能提高精度,但却会使算法的搜索空间急剧增大。
实数编码适用于表示范围大、精度高的数,能有效地克服二进制编码的海明悬崖缺点,且可直接采用真值编码,便于与问题相关的启发知识,可以提高算法的搜索效率。移动机器人的路径可以视为一系列坐标点连接而成的线段,对移动机器人的路径规划也就是对这些坐标点做各种操作,以使它们符合移动机器人行走的需要。考虑到移动机器人自身的特点(不仅需要避开障碍物,还要保证路径的平滑性),以及移动机器人路径中转向点个数的不确定性,采用可变长染色体的实数编码方式,用实数直接对路径坐标点进行编码,以便于对路径点的灵活操作,从而避免在使用二进制编码时,二进制位串与直角坐标点之间互相转换的繁琐操作,且易于进行遗传算子操作。
1.3 种群初始化
执行遗传算法的最优路径设计是必须对种群进行初始化,由于初始路径随机产生,各转向点坐标可能分布在整个规划区域范围内,包括可行的和不可行的,这样便增加了搜索范围。这里在可行区域内限制初始转向点,以加快遗传算法的收敛速度。具体做法为:判断该转向点是否在可行区域内,如果不是,则重新选取,直到坐标点符合条件为止。
根据规划环境的复杂度不同,最优路径中转向点的个数也是不确定的,一般来说,环境越复杂,转向点就越多,因此算法采用变长编码技术,通过对染色体进行删除、插入等操作,能够确定合适的转向点个数,使路径达到最优。但是,转向点数目太多,占用资源也就会太大,它将使运算速度变慢。因此,在运算过程中,设定最大转向点为Nmax,种群中每个个体的长度n满足2≤n≤Nmax。
采用小生境原理,将每一代个体划分为若干类,每个类中选出若干适应度较大的个体,作为一个类的优秀代表组成一个种群。
1.4 适应度函数
所谓移动机器人的路径规划,指在起点和终点之间找出一条最短的可行路径,其约束条件是不与障碍物相交,同时移动机器人在行走中的转角不宜太大。该算法以两个条件作为规划路径的可行性评价函数,即路径总长度和各转向点拐角的平均大小,对于不可行的路径,对其适应度进行惩罚,使它的适应度差于可行路径。
(1)路径总长度。为了防止移动机器人与障碍物碰撞,应尽量使其与障碍物保持一定的安全距离。假设移动机器人的安全半径为r;移动机器人与障碍物的距离为d,则路径总长度Len由式(1)计算:![]()
式中:d(pi-1,pi)为转向点pi-1与pi之间的长度。如果pi-1与pi之间的路径不可行,则使用惩罚函数法对其适应度进行惩罚。惩罚函数定义如下:
式中:ε为惩罚因子。路径的评价函数可以写为:![]()
判断两点之间的路径是否可行,只需判断这两点的连线与障碍物的各边是否相交即可。根据几何学原理,判断两条线段是否相交可由以下两个步骤进行确定:快速排斥试验;跨立试验。鉴于文章篇幅,在此不再对这两个试验进行详细阐述。
评价路径是求路径长度最短的问题,通过惩罚因子,可以使不可行路径变长,从而降低它的适应值。
(2)路径平滑度。移动机器人的特点决定了它在行走过程中不宜以过大拐角进行转向,因此整条行走路径应趋于平缓而光滑,即每一转向点处的拐角值应尽可能小。这里假设拐角最大值不能超过π/2,平滑度可以使用路径的平均拐角值来计算:
式中:ξ为一个趋于零的常数(ξ>0);αi(0≤αi≤π,i=2,3,…,n-1)表示两向量AC,CB之间的夹角,B,C点的坐标分别为(xi-2,yi-1),(xi,yi),(xi-1,yi-1);k为αi中大于或等于π/2的个数,即当某一夹角大于或等于π/2时,对适应度进行惩罚。当n=2时,路径为起始点与终止点的连线。若其可行,则M值趋于0。可以看出,M值越小,路径的平滑度越好。
得到了以上两个条件的评价函数,就可以获得整条路径的适应度函数。采用各项评价函数加权求和是常用的确定适应度函数的方法。因为各个加权系数不是恒定不变的,而是随路径和障碍物的情况变化而变化的,所以这种情况下各个加权系数就很难调整和确定。因此,在确定适应度函数时,尽量使适应度函数的项数最少,但又必须把路径规划的两个条件融合在遗传优化过程中。这里采用评价函数相乘的形式,如式(6)所示。
f=1/(ML) (6)
以f作为选择操作的依据,则路径的长度和平均拐角越小,其适应度越好。
1.5 遗传算子
(1)选择算子。使用锦标赛选择法和精英保留法相结合的选择策略。采用在锦标赛选择法选择时,先随机在群体中选择K个个体进行比较,适应度最好的个体将被选择作为生成下一代的父体,参数K称为竞赛规模。这种选择方式能使种群中适应度好的个体具有较大的“生存”机会。同时,由于它只使用适应度的相对值作为选择的标准,而与适应度的数值大小不成直接比例,从而避免了超级个体的影响,在一定程度上避免了过早收敛和停滞现象的发生。精英保留法是当前种群中适应度最好的个体,它不参加遗传操作,可直接复制到下一代,替换经交叉和变异操作产生的子种群中适应度最差的个体,其优点是在搜索过程中可以使某一代最优个体不被遗传操作所破坏,这样可保证遗传算法以概率收敛到最优解。经验证明,保留占种群总体2%~5%数量的个体,效果最为理想。
(2)交叉算子。采用单点交叉法,在两个父体上分别随机选取一个交叉点(起点和终点除外),交换两个个体在各自交叉点之后的染色体。考虑到规划路径的长度是可变的,为了防止交叉操作后出现过于繁琐或简单的路径,对生成的新个体长度进行限制,即最大长度不能超过Nmax,并且不能产生回路,若不符合要求,重新获取两个父个体的交叉点。
(3)插入算子。设计了两种插入算子。第一种是有针对性的,即在连线穿过障碍物的两个转向点之间插入一个或多个转向点,使产生的路径避开障碍物,如图1(a)所示;第二种是一般意义上的插入,以一定概率插入一个随机产生的转向点,如图1(b)所示。
(4)扰动算子。同样设计了两种扰动算子,第一种只选取路径不可行的转向点来进行小范围的调整,使其路径可行,如图1(c)所示;第二种是不管路径是否可行,任意选取一个位置,以概率pm对其转向点坐标进行调整。在进化初期,不可行的解数量较多,调整的范围大一些。在进化后期调整范围逐渐缩小,如图1(d)所示。
(5)删除算子。建立一个存储空间REC,在一条路径中,如果点(xi-1,yi-1)与点(xi,yi)的连线经过障碍物,但(xi-1,yi-1)与(xi+1,yi-1)的连线不经过障碍物,则将点(xi,yi)添加到REC中。如果REC不为空,则从中随机选取一点删除(见图1(e));否则,在路径中任意选取一个路径点,以概率pd进行删除,如图1(f)所示。
(6)平滑算子。平滑算子只对可行路径中最大的拐角进行操作,如图1(g)所示。删除拐角α的顶点pj,依次连接点pj-1,p1,p2,pj+1构成可行路径段序列pj-1p1→p1p2→p2pj+1。
(7)倒位算子。随机选取路径中两个中间转向点,颠倒之间的转向点。倒位算子可使路径发生急剧变化,对于转向点较多的路径会有积极的意义。通常的交叉和变异算子不易取得此种效果,而且倒位算子能修正遗传进化过程中可能出现的基因误差,如图1(h)所示。
1.6 遗传算子概率选择
选择合适的遗传算子执行概率是遗传算法能否收敛到最优解的关键之一。在进化过程的前期,群体中存在大量的不可行解,因而交叉算子、扰动算子的概率应该取得较大些,而平滑算子取较小的概率;随着进化过程的推进,可行解增多,应适当提高平滑算子的概率,以提高可行解的平滑性能。同时,为了防止交叉算子和扰动算子对可行解的破坏,需降低其执行概率,并取较小的扰动概率对可行解的形状进行微调。其中,扰动算子(1)和插入算子(1)是对路径转向点的启发式操作,都是针对不可行路径的优化调整,对于这些算子应当始终选择较高的概率。插入算子(2)会使路径的转向点数量增加,应当取较小的概率。
1.7 终止条件
一般在对问题无知的情况下,可以在目标函数达到一个可以承受的范围内之后,即终止算法。另外,还可设置最大进化代数,在给定的进化代数之内强行终止算法,从而保证运算时间的要求。为了实用起见,在此采取最大进化代数终止准则,并选取适应度最好的可行路径。
1.8 算法流程
改进后的基于小生境遗传算法流程如图2所示。具体算法描述如下:
(1)初始化种群,沿起点和终点连线方向等距离选取N个点,在这些点的垂直线上随机选取转向点的纵坐标,并且使这些转向点不在障碍物内;
(2)将每一代个体划分为n个类,每个类中选出若干适应度较大的个体,作为一个类的优秀代表,组成一个种群。种群规模Gi(i=1,2,…,n+1);
(3)计算种群中所有个体的适应度,将其最好的个体保留,然后采用锦标赛选择法,挑选父个体,以执行交叉操作,并且检查获得的子代个体染色体长度是否超过N,如果没有超过,则保留,否则丢弃。
(4)以设定的概率对新产生的子代个体进行变异、插入、扰动、删除、平滑的操作。此过程中,采取预选择机制,比较子串和父串适应度的大小,如果子串的适应度高于父串的适应度,就替换父串;否则维持父串不变;
(5)重复第(3)和第(4)步直到获得的新个体数量与父代群体数量相等;
(6)用保留的上一代最优个体替换新种群中适应度最差的个体;
(7)检查算法停止条件。符合则中止,否则跳转至第(3)步,算法继续进行。
2 仿真
移动机器人最优路径规划设计的环境信息主要包括移动机器人活动区域内的各种障碍物信息识别。本文视各种障碍物都为不可行区域,并以任意形状的多边形来表示。在VC 2005环境中,对以上算法进行仿真。选取算法参数为路径最大转向点数30,初始转向点数20,种群大小100,锦标赛规模取5,最大进化代数G=80。在算法的前20代中,交叉概率pc=0.6,扰动概率pm=0.6,插入算子2pi=0.6,平滑算子概率ps=0.1;在20代以后pc=0.1,pm=0.2,pi=0.01,ps=0.7。
在算法的初始阶段,由于转向点较多,因此删除概率应当取大一些,这样可以使转向点数量减少,从而缩小路径的长度;但在算法后期,路径点已经较少,再使用较大的删除概率,容易使算法陷入局部解,且收敛到最优解的概率大大减少,因此进化后期的删除概率应减少,保证路径的多样性。初始删除概率选0.8,大约20代以后,选取0.1,而扰动算子1和插入算子1的概率始终为0.8。选取两种不同的环境(见图3),分别运行上述算法各10次,选出效果最好的路径显示在图3(a)、图3(b)中。从图3中可以看出,改进后的遗传算法对各种环境都有良好的适应性。其中,图3(a)的情况最简单,只用了19代就得到了最优结果;图3(b)进化了36代后;收敛到最优解。
为了与标准遗传算法的性能进行对比,分别使用本文算法和标准遗传算子对环境一和二进行实验。标准遗传算法的选择采用锦标赛选择法,其交叉概率、变异概率与本文算法相同,运行结果如表1和表2所示。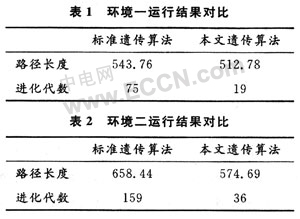
从表1,表2中数据可以看出,不管是运行时间,还是收敛的路径长度,本文算法都优于标准遗传算法。主要是由于本文算法针对规划路径有针对性地设计了新的遗传算子,从而加快了进化的速度,更容易收敛到最优解。
3 结 语
采用基于预选择机制的小生境技术,且基于启发式知识来设计遗传算子。对标准遗传算法进行了改进和扩充,并应用于移动机器人行走的路径规划。该算法同时兼顾了遗传进化的快速性和群体的多样性,有效地抑制了“早熟”现象的发生,能很好地搜索局部最优解和全局最优解。实验证明,该算法在不同的环境中都能够在较小的进化代数内收敛到最优解,算法的执行速度和成功率明显高于标准的遗传算法。另外,在进化的不同阶段选取合适的交叉和变异概率对于进化结果有着关键性的影响,本文将算法分成了两个阶段,分别设定了不同的遗传操作概率,这种方式还比较简单,不能完全适应种群的变化情况。如何让算法根据种群进化情况自动调整和优化这些参数,还需进一步的研究和改进。
小生境遗传算法的移动机器人路径优化技术
- 机器人(200953)
- 遗传算法(20480)


相关推荐
机器人、协作机器人和移动机器人,你分的清楚吗
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人是可怕的大型机器,通常需要关在笼子中,其功能安全要求一般涉及门联锁装置
2018-10-30 11:33:11
移动机器人底盘主要包含哪些设备
移动机器人底盘主要包含电机,电机驱动器,底盘控制器和其它设备。底盘控制器与电脑通信,把电脑指令解析后发送给电机驱动器,同时控制器底盘其它设备,比如碰撞传感器,避障传感器,充放电管理,或者声光设备等
2021-09-07 06:15:19
移动机器人的三种主要运动系统
构建机器人 | 制作移动机器人 | 构建第一个机器人 | 机器人电子 | 机器人控制器 | 机器人传感器 | 交互机器人选择运动系统让我们快速浏览一下用于移动机器人的三种主要运动系统。 如果比较表中
2021-09-01 08:12:28
遗传算法的优化 精选资料分享
1、基于改进遗传算法的大型海上风电场优化电网设计(Optimal Electric Network Design for a Large Offshore Wind Farm Based on a
2021-07-12 07:00:19
遗传算法的特点和应用概述
简单、通用,鲁棒性强,适于并行处理。二、遗传算法的特点和应用 遗传算法是一类可用于复杂系统优化的具有鲁棒性的搜索算法,与传统的优化算法相比,具有以下特点:1. 以决策变量的编码作为运算对象。 传统的优化算法往往直接利用决策变量的实际值本身来进行优化计算,但遗传算法是使...
2021-12-31 06:21:52
Labview My RIO 移动机器人
LabView For MyRIO。myRIO组件包中有机器视觉处理模块,多轴联动插补运动解算模块,移动机器人Robotic开发包,内部有全向轮运动解算模块,移动机器人路径规划,定位,壁障等模块。目前已将
2016-08-21 12:20:22
【OK210申请】焊后焊缝跟踪及应力消除机器人
神经网络与遗传算法对协调控制器输出的各个控制量进行计算,设计基于此偏差信息控制的十字滑块和焊后焊缝跟踪机器人移动机构协调控制系统偏差,但协调控制是一个非常复杂的问题,控制器的设计直接决定了机器人的跟踪效果
2015-08-10 22:27:36
【下载】《机器人学、机器视觉与控制――MATLAB算法基础》
`内容简介本书是关于机器人学和机器视觉的实用参考书, 第一部分“基础知识”(第2章和第3章)介绍机器人及其操作对象的位置和姿态描述,以及机器人路径和运动的表示方法;第二部分“移动机器人”(第4章至第
2018-04-08 18:19:42
【下载】《机器人学、机器视觉与控制――MATLAB算法基础》
第二部分 移动机器人第4章 移动机器人载体4.1 机动性4.2 移动机器人小车4.2.1 移动到一个点4.2.2 跟踪一条直线4.2.3 跟踪一般路径4.2.4 运动到一个位姿4.3 飞行机器人4.4 本章总结扩展阅读·······下载链接:【免费名额30个】手把手教你快速学习和应用人工智能技术`
2018-01-17 17:38:11
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
传感器数据获取环境信息,规划路径并选择最优路径到达目的地的算法。运动控制算法是指移动机器人在到达目的地后,根据传感器数据调整方向和速度的算法。这些算法需要在移动机器人的控制器上实现,并与传感器、执行器等
2023-06-28 09:36:32
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
基于整个智能制造的发展
2023-06-28 09:52:41
为移动机器人上的Kinect v2配置移动电源
Kinect v2如果用于移动机器人上(也可以是其他应用场景),为方便有效地展开后续工作,为其配置移动电源是十分必要的。一、选择移动电源Kinect v2原装电源适配器参数(详见下图1所示):交流
2021-12-27 07:03:07
什么是移动机器人软硬件系统问题
接触了移动机器人这么久,我觉得应该写点什么东西,分享一下最基础的自己关于移动机器人的理解,也作为笔记总结,留到以后查阅。目前我还是觉得自己刚入门,有时候总想的太多,不如实践来的更直接,下面总结之前
2021-08-06 06:13:07
利用myrio控制移动机器人的问题
请教论坛里大神们一个问题,我现在在研究myrio控制的移动机器人,在视觉识别这块儿遇到比加大的问题解决不了,上论坛逛了逛发现labview的资料很多,但是myrio的基本上看不到。想问问大神们咱们
2018-05-02 15:16:19
基于遗传算法的异步电机
在对异步电机矢量控制系统分析的基础上,给出了参数优化设计的数学模型,采用了一种改进的遗传算法,并利用Matlab软件对PID参数进行了优化设计,得到了满意的优化参数.讨论了遗传算法的一些关键技术,如
2019-12-10 15:40:08
基于遗传算法的片上网络虚通道分配算法
【作者】:李晓辉;曹阳;王力纬;陈晨;【来源】:《华中科技大学学报(自然科学版)》2010年03期【摘要】:针对虚通道技术导致片上网络(NoC)面积增加的问题,提出了一种基于遗传算法的NoC虚通道
2010-04-22 11:34:25
基于FPGA怎么实现三轮全方位移动机器人运动控制系统?
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
基于LPC2119的自主式移动机器人设计方案
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍
2020-05-11 06:39:04
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统
对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有
2019-07-11 07:08:49
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
基于Petri网与遗传算法的半导体生产线建模与优化调度
针对半导体生产线调度复杂、难以优化的问题,本文提出一种基于层次有色赋时Petri网技术和遗传算法相结合的优化调度方法.该方法利用层次化的思想结合自顶向下建模方法对半导体生产线进行模块化建模,模型不仅
2010-05-04 08:08:48
基于SLAM的移动机器人设计
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于超声波传感器的自主移动机器人探测系统
摘要:针对自主移动机器人沿墙导航过程,设计一种收发一体式超声波传感器与步进电机组成的探测系统。介绍此系统的结构和软硬件设计。实验总结超声波波束与目标物的入射角大小对测距稳定性的影响,提出搜寻离墙
2018-11-02 16:04:48
基于超声波传感器的自主移动机器人的探测系统
本帖最后由 eehome 于 2013-1-5 09:59 编辑
移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。这是用不同的传感器测量并从那些测量中提取有意义的信息而
2012-01-19 13:45:49
如何利用扫地机轮子制作ROS移动机器人地盘
,要么巨简陋--编码器线数低于40线,根本不能满足ROS移动机器人的需要。为了锻炼自己的动手能力(这个借口看起来比较积极,能掩盖没钱的尴尬...),准备从零打造一款ROS移动机器人地盘。扫地机轮组减速比大致是50左右,电机编码器15-20线,轮子转一周大概是1000个脉冲,测量精度够用。通过L298N
2022-01-14 08:36:54
如何实现移动机器人的设计?
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
2020-11-23 15:08:52
如何导出移动机器人URDF模型
文章目录1. sw_urdf_exporter插件2. 如何导出移动机器人URDF模型想必搜索这个方法的童鞋们对SolidWorks应该再熟悉不过了吧,首先分享一个我一直在用的公众号
2021-08-30 07:28:07
家庭移动机器人避障常用传感器及相关技术
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了
2020-05-14 08:15:00
履带式移动机器人的设计
作为一个技术宅,我对机器人和单片机很感兴趣。在这里我把自己做过的一款履带式移动机器人的资料分享给大家。欢迎大家吐槽!同时也希望对做机器人的同学有帮助。 该机器人采用STM32F103RCT6为主
2017-07-27 18:28:18
差速移动机器人轨迹跟踪控制方法
PID控制器设计3、距离PID控制器设计四、基于PurePursuit算法的差分移动机器人轨迹跟踪方法1. PurePursuit算法基础2.控制律设计3.基于两轮差速模型的PurePursuit算法
2021-09-01 08:41:30
怎样去设计一个基于嵌入式Linux的移动机器人控制系统
识别结果时,系统进入卡死状态。本文引用地址: 航向测量为了使移动机器人能够沿指定的方向行驶并能修正由外...
2021-12-20 07:16:42
想设计炫酷的移动机器人?视觉定位设计方案分享给你!
针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的缺陷的基础上, 提出了一种获取目标的空间
2019-06-01 08:00:00
旋转编码器怎么节约移动机器人功耗?
商用移动机器人潜力巨大,能够为设备和服务行业培养广阔的市场。根据近期研究判断,预计单单是无人机市场在2022年之前就有机会飙升至18十亿美元以上。地面上的移动机器人则能用于众多领域(工业、商业和家用
2019-08-13 07:29:10
最实用的STM32和ROS机器人的串口通信方案
全网最实用的STM32和ROS机器人的串口通信方案小白学移动机器人同名公众号:小白学移动机器人创作声明:内容包含虚构创作内容中的情节存在虚构加工,仅供参考全网最实用的STM32和ROS机器人的串口
2021-08-20 06:33:28
有哪些厂家的轮式移动机器人可以实现力矩控制?
小白,刚入行,想请教一下各位大佬,pioneer 3-AT可以使用力矩进行控制吗?如果不行的话,哪些厂家的轮式移动机器人是开放力矩控制的?
2020-09-22 11:00:09
深度解析|机器人自主移动的秘密(三)
中游刃有余。D*算法的最大优点是不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。以上是目前大部分移动机器人都需要的路径规划算法,而扫地机器人
2017-08-01 13:50:56
电机在ROS移动机器人系统中的作用
控制电机旋转方向的场景下,通过两个继电器便可以实现电机控制。在ROS移动机器人的应用场景下对电机的控制不仅仅有旋转方向的控制需求,而且还有电机转速的控制需求,所以在这种应用场景中 常常使用功率开关管
2023-03-17 14:21:40
请问怎么设计一种室外移动机器人组合导航定位系统?
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
资料:移动机器人能否自动充电?
机器人就处于一种非连续的任务环,这阻碍了机器人的长期自治。所以移动机器人能否自动充电成为了关键。下面给大家分享一个《室内移动机器人自动充电技术》的资料,和楼主一样对机器人感兴趣的朋友可以看看~
2016-01-20 09:39:06
转: 基于LPC2119的自主式移动机器人设计
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心
2016-07-28 15:02:56
移动机器人(AGV/AMR)导航控制器 MRC5000
MRC5000是一款全自主知识产品的移动机器人领域专业控制器产品。MRC5000具有“可靠、稳定、灵活、易用“等特点,内置多种导航算法,支持各种国内外常用型号导航传感器,具有防火墙功能和无线路由功能
2021-11-22 16:14:01
遗传算法在管网优化设计中的应用
摘要:介绍了一种较新的工程优化算法———遗传算法,将其引入管网优化设计计算,增强了管网设计方案的经济合理性。关键词:最优化;遗传算法;管网
遗传算法原
2009-01-09 16:43:41 8
8
8基于协同进化遗传算法的多议题谈判
以协同进化遗传算法模拟自动谈判是目前智能计算和多Agent 系统等领域研究的新课题。针对现有文献仅模拟单议题谈判的情况,该文提出基于协同进化遗传算法和适应度共享小生境
2009-03-25 08:41:4210
10基于遗传算法的移动机器人路径规划
采用动态可变长编码的方法,以栅格表示环境。针对遗传算法大型障碍物难的问题,采用follow wall行为,较好地解决了基于遗传算法的快速路径规划和大型障碍物避障问题。该算法适
2009-04-17 09:31:4353
53基于小生境免疫遗传算法的硅钢片优化排样
提出一种基于小生境免疫遗传算法的多级序列优化方法,并解决硅钢片优化排样问题。以免疫算法为基础,通过遗传算法进化抗体群,利用小生境技术保持抗体群的多样性。遗传算
2009-04-23 09:16:1624
24基于小生境遗传算法的关联规则挖掘方法
通过采用惩罚函数设置支持度阈值,有效地解决了规则冗余问题。在小生境遗传算法方面,采用了一种新颖的素因子染色体编码方法并引入了最大频繁项分布表。该编码方法把原来
2009-04-23 09:24:4716
16基于势场法的移动机器人避障路径规划Anti-collisio
针对势场法所固有的几个缺陷,提出了一种基于势场法的移动机器人避障路径规划算法,并成功应用于未知复杂环境下移动机器人的路径规划中。仿真试验表明:提出的方法具
2009-05-27 12:59:2730
30遗传算法在分布式O S2CFAR检测系统优化中的应用
针对一个3 传感器分布式O S2CFAR 检测系统, 本文分别使用了基本遗传算法和改进的遗传模拟退火算法、小生境遗传算法进行优化搜索, 给出了一组不同检测条件下的准最优搜索结果。
2009-07-03 09:20:0511
11基于小生境遗传算法的分布式OS-CFAR检测系统优化与性能分
利用小生境遗传算法, 对不同检测窗长度和检测信噪比的三传感器分布式O S2CFAR 检测系统进行了优化设计, 给出了一组针对不同检测环境与融合方式的搜索结果。分析表明, 对于非
2009-07-10 08:26:4138
38基于多传感器信息融合的移动机器人的路径规划
移动机器人是机器人技术的一个重要领域,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。动态未知环境下的移动机器人路径规划必须基于对传
2009-07-17 09:22:3318
18基于遗传算法优化的机器人模糊控制系统
本文提出一种基于遗传算法优化的模糊控制系统并将之用于五自由度关节型机器人轨迹跟踪控制,该系统将五关节的位置误差和误差变化率作为模糊控制器的输入,输出为五关节
2009-12-18 11:51:2732
32移动机器人动态避障算法
把滚动规划和径向基函数神经网络(RBFNN)预测相结合,提出一种动态不确定环境下移动机器人局部路径规划过程中,针对动态障碍物的新的混合避障算法.利用摄像镜头采
2010-03-01 18:09:5436
36AMR控制器:科聪AMR移动机器人控制器
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
AGV控制器:科聪叉式移动机器人控制器
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC5000系列自带丰富的I/O资源和各种通讯接口,支持CANopen
2023-07-11 10:26:45
小生境遗传模糊PID控制在皮带秤中的应用
采用模糊PID方法控制流量恒定,并结合遗传算法优化PID参数.引入小生境技术,克服了传统遗传算法早熟收敛和后期收敛速度慢以及收敛效率低的缺点,同时对遗传算子也进行了改进,获得
2010-10-21 16:31:5920
20基于混沌遗传算法的组播路由优化研究
在采用混沌遗传算法优化多目标QoS组播路由时,为克服Logistic映射收敛速度不快,而使传统混沌遗传算法优化效果不好的缺陷,将Tent混沌遗传算法引入QoS组播路由问题的求解中。该算法
2011-04-02 00:04:0817
17基于遗传算法的AS-R移动机器人路径规划研究
摘要$将遗传算法应用于机器人的全局路径规划#并在AS-R移动机器人上进行了实验研究% 首 先用栅格法对机器人的工作环境进行划分# 得到机器人的环境模型 其次采用遗传算法进行路径搜
2011-04-06 15:20:0672
72基于遗传变异蚁群算法的机器人路径规划的改进
针对基本蚁群算法在机器人路径规划问题中容易陷入局部最优的问题,提出了一种改进的蚁群算法,利用遗传算法加入了变异因子使最优路径产生变异,从而降低了蚁群算法陷入局部极
2012-08-29 14:48:3678
78移动机器人的分类与移动机器人技术研究现状和未来发展的分析
移动机器人分类 移动机器人从工作环境来分0可分为室内移动机器人和室外移动机器人1按移动方式来分!轮式移动机器人。步行移动机器人。蛇形机器人。履带式移动机器人。爬行机器人等1按控制体系结构来分!功能
2017-09-16 09:18:5913
13求解物流路径优化的改进遗传算法研究
的基本算子进行改进,其中将链路状态算法强大的寻优能力融入交叉算子中,保证个体逐代进化。引入与遗传代数相关的自适应概率,提高了遗传算法的搜索效率和收敛速度,仿真实验表明,与传统遗传算法和TSPLIB标准值相比,提出的方法得到的结果路径更优,效率更高。
2017-11-11 17:46:053
3遗传算法的解析与基于遗传算法的机器学习的介绍
遗传算法在许多优化问题中都有成功的应用1但其本身也存在一些不足2如何改善遗传算法的搜索能力和提高算法的收敛速度1使其更好地解决实际问题1是各国学者一直探索的主要课题之一2本文综述了遗传算法中编码表示
2017-11-13 17:40:022
2人工势场法的移动机器人路径规划
基于传统人工势场法的机器人路径规划存在障碍物附近目标不可达和局部极小点的问题。在研究该问题产生原因的基础上,提出了一种基于改进人工势场法的移动机器人路径规划算法。该算法在斥力函数中引入了机器人
2017-11-20 14:28:2515
15一种新的小生境萤火虫模糊聚类算法
模糊C均值算法因其简单、快速得到了广泛应用,但仍存在对初始值敏感和容易陷入局部最优的不足。提出了一种新的小生境萤火虫模糊聚类算法。该算法使用遍历性较好的立方混沌映射序列初始化萤火虫种群,并将随机惯性
2017-11-21 16:50:041
1基于佳点集和小生境技术的混合果蝇优化算法
为将果蝇优化算法有效应用在多模函数优化问题中,设计了一种优化多模函数的果蝇优化算法基于佳点集和小生境技术的混合果蝇优化算法。首先引入数论中的佳点集概念构造初始种群,使其较均匀地分布在可行域中并且产生
2017-11-23 17:29:091
1斥力场下粒子群优化的移动机器人路径规划
针对移动机器人在复杂环境下采用传统方法路径规划收敛速度慢和局部最优问题,提出了斥力场下粒子群优化(PSO)的移动机器人路径规划算法。首先采用栅格法对机器人的移动路径进行初步规划,并将栅格法得到的初步
2017-11-29 15:59:060
0基于改进遗传算法在餐厅服务机器人的路径规划应用
针对遗传算法(GA)易产生早熟现象和收敛速度慢的问题,提出了一种基于传统遗传算法(TGA)的改进遗传算法HLCA,用于实际餐厅服务机器人的路径规划。首先,通过基于编辑距离的相似度方法对拟随机序列产生
2017-11-30 11:03:5412
12小生境分布估计量子遗传算法NEDQGA
针对现有量子遗传算法进化机制存在的收敛速度慢以及易陷入局部极值的问题,为提高量子进化算法的全局收敛性能,结合小生境技术中的共享适应度函数方法,提出了小生境分布估计量子遗传算法NEDQGA,在种群内部
2017-12-06 11:37:000
0移动机器人路径规划的实现
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素
2021-10-14 14:38:36 1943
1943
1943移动机器人行业融资大热 5G为移动机器人带来机遇
移动机器人行业融资大热 近年来,随着人口红利的减弱,“用工荒”问题日渐凸显。解决企业的用工难题,智能制造升级势在必行。而智能制造中的一项重要应用就是移动机器人。移动机器人具有自主导航、智能
2021-01-19 12:58:501381
1381移动机器人实现路径规划
近年来,移动机器人的研究受到了人们的高度重视,人们对于机器人的要求不再局限于简单的移动,而是希望机器人能够根据周围环境变化采取对应措施,做到自主移动的能力。因此,路径规划作为移动机器人的一个重要因素就显得尤为重要
2020-12-26 09:28:41628
628【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
2023-06-20 17:09:40999
999
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发展,移动机器人
2023-06-21 17:29:16871
871





 工商网监
工商网监
评论