回波信号处理与分析 - 一种34位MCU超声相控阵导盲系统设计
2012年07月30日 11:17 来源:现代电子技术 作者:秩名 我要评论(0)
5 回波信号处理与分析
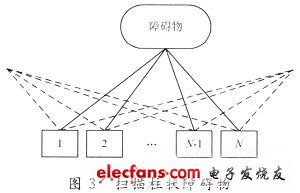
对应不同的障碍物和地形,系统收到回波的波形和时间都会有区别。根据这2个条件可以实现对障碍物和地形的判断。这里用到1个由N个探头组成的线阵。探头分别编号为1,2,…,N-1,N。当遇到如图3所示障碍物时,相控阵在中间的焦点碰到障碍物接收到的回波,应该是N路声波在焦点处的叠加;而在左右两边聚焦点处由于没有碰到障碍物,所以不会有叠加后的波形返回。以上2种情况收到的波形分别如图4和图5所示。如果碰到沟壑类的障碍物时,如图6所示,这里假设编号N-1探头接收回波信号,当人走到a处时,相控阵聚焦在c点,此时焦点到探头N-1的距离为l,则超声波从探头N-1发射到聚焦点返回探头的时间为t=2l/c,c为空气中超声波的速度。当人走到b点时,相控阵聚焦在d点,这时在d处不会有聚焦后的波形返回,只能是各路超声波在沟壑底面发生反射。仍以编号N-1探头为例,从发射到接收到回波的时间应为t’=![]() ,△l为聚焦点到到沟壑的长度。从上面的分析可以看出,当相控阵的位置从a移动到b,系统收到的回波波形以及接收到波形的时间均发生了明显变化,从而为判断地形提供了可靠依据。
,△l为聚焦点到到沟壑的长度。从上面的分析可以看出,当相控阵的位置从a移动到b,系统收到的回波波形以及接收到波形的时间均发生了明显变化,从而为判断地形提供了可靠依据。
本文导航
- 第 1 页:一种34位MCU超声相控阵导盲系统设计
- 第 2 页:超声相控阵
- 第 3 页:回波信号处理与分析
- 第 4 页:回波信号图
标签: