旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。早期的旋转变压器其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。由于制作和精度的缘故,磁性编码器没有其他两种普及。光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。和光学编码器相比,旋转变压器有这样几点明显的优点:
①无可比拟的可靠性,非常好的抗恶劣环境条件的能力;
②可以运行在更高的转速下。(在输出12 bit的信号下,允许电动机的转速可达60,000rpm。而光学编码器,由于光电器件的频响一般在200kHz以下,在12 bit时,速度只能达到3,000rpm);
③方便的绝对值信号数据输出。
旋转变压器能够按正弦、余弦、线性等函数关系将转角转换为电信号输出,用于自动控制系统中作为运算信号元件,可买现三角函数运算、坐标变换、精确测位、角度的数字转换或数据传输、移相等。
旋转变压器的作用是通过输出电压和转子转动角度之间的关系来体现的,对旋转变压器的要求主要集中于信号变换性能方面,具体包括:感应电势与转角之间的变化关系尽口_能符合正弦规律;函数误差与零位误差小,精度高,零位输出电压(剩余电压)小;工作可靠性高,损耗小,效率较高。
驱动电机旋转变压器的工作详解
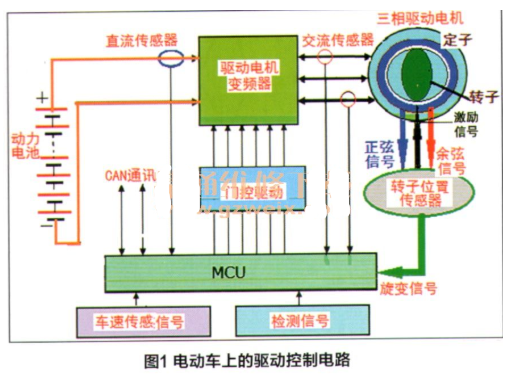
电动车上的驱动电机现多为永磁同步电动机,这其中“位置传感器”的作用重大,它通常被用于检测电机转子旋转的瞬间准确位置,涉及到驱动电机的供电系统。电动车上只有直流电源,驱动电机使用的却是三相交流电,中间需要用一个“变频器”将动力电池的高压直流电转变成三相交流电向同步电机供电,以适应车辆驱动的不同需要。
其中变频器是由车辆驱动系统的ECU控制的,通过对6个IGBT场效应管的门控驱动电路、控制三相交流电的频率及次序来改变驱动电机的转速和转向,所以变频器的门控电路是变频器的核心。其中输入ECU的多种信号中,负责精准检测驱动电机转子的旋转位置的信号十分重要,而在当前的驱动电机中,常采用 “磁阻式旋转变压器”作为位置传感器。电动车上的驱动控制电路如图1所示。
一、磁阻式旋转变压器的结构与原理
电机转子位置传感器常被称作旋转变压器或同步分解器,它是一种电磁式传感器,汽修行业里的人常常称它为“旋变”。旋转变压器实际上是一种特殊的小型交流电机,可用来精确检测电机转子的角位移和角速度。它由定子和转子组成,其定子由高性能硅钢片叠成,其上有绕组作为变压器的原边接受励磁电压,转子绕组作为变压器的副边,通过电磁藕合在副边线圈上产生感应电压。
1.普通变压器与旋转变压器的区别
普通变压器的原边和副边的线圈是相对固定的,中间有铁芯进行电磁交变,所以输出与输入的电压比是不变值。旋转变压器的原边绕组不动,副边绕组随转子旋转,当转子的转角位置改变时,其副边绕组输出电压的大小会随转子角位移而发生变化,若输出绕组的电压幅值与转子转角成正弦或余弦的函数关系、保持某比例关系或与转角成线口性关系就构成三种不同类型的旋转变压器。
2.磁阻式旋转变压器的特点
电动车的驱动电机上多使用磁阻式旋转变压器,它是旋转变压器的一种特殊形式,利用磁阻原理来实现电信号间的转换。它的特点是原边与副边的绕组都放在电机定子的不同槽内,且均固定不旋转。原边绕组属励磁绕组通入正弦形的激磁电流,而副边是由两相线圈产生输出信号,磁阻式旋转变压器示意图如图2所示。
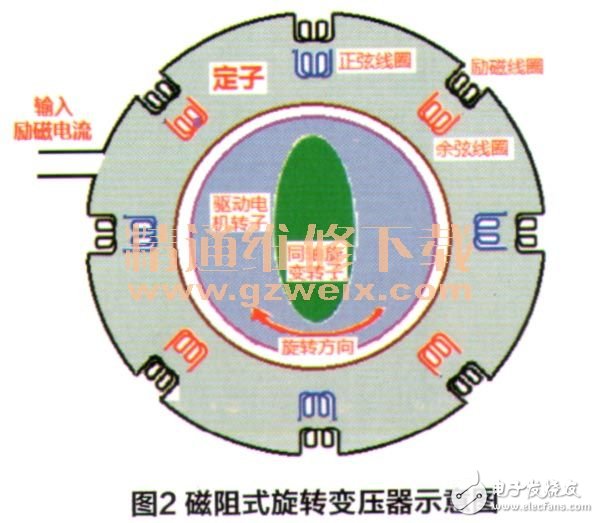
旋变定子和转子的铁芯由铁镍软磁合金或冲有槽孔的硅钢片叠成。转子不用永磁材料制成,它是由驱动同步电机的永磁转子同轴带动旋转的。转子在旋转时通过磁阻原理在副边的两相绕组上分别感应出正弦及余弦电压信号,故称为正弦绕组和余弦绕组,产生彼此相差90°的电角度信号。
磁阻式旋转变压器的转子采取多极形状,磁极的外形应符合能感应正弦信号的特殊要求,因此磁场气隙应近似于正弦波的形状,如图3所示。利用气隙和磁阻的变化使输出绕组的感应电压会随机械转角作相应正弦或余弦的变化,同时转子必须满足多磁极的要求,旋转变压器的定子与转子的磁极数是不相同的,定子磁极数比转子的多。
3.磁阻式旋转变压器的三个绕组
磁阻式旋转变压器有三个绕组,包括有一个激励线圈、两个正交的感应线圈等三组线圈,对外共有6条引线。激励线圈接受输入的正弦型激励电流,激磁频率通常有400Hz、3 000Hz及5 000Hz等多种。正交的两个感应线圈,依据旋变的转子、定子的相互位置关系,调制出具有sin正弦和cos余弦包络的检测信号。如果激励信号是sinωt,转子与定子间的角度为θ,则正弦信号为sinωt× sinθ,而余弦信号则为sinωt× cosθ。根据siN、cos信号和原始的激励信号,通过必要的检测和比较电路即可高分辨率地检测出转子位置。
4.磁阻式旋转变压器的结构原理
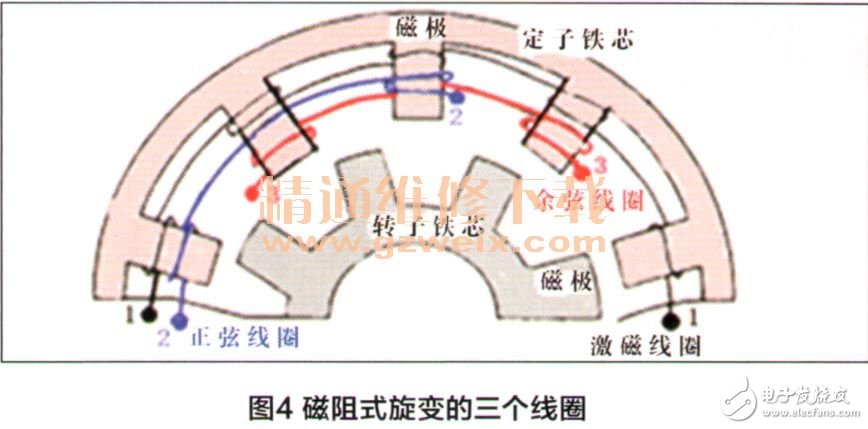
磁阻式旋变的三个线圈如图4所示,其中转子齿为4个,定子齿画出5个。激磁线圈、正弦线圈和余弦线圈均安置在定子槽内,输入的激磁绕组1-1是逐个磁极反向串接,而正弦线圈2-2及余弦3-3,则是以两个磁极为间隔,反向串接的输出绕组。当转子相对定子旋转时,定子、转子间气隙的磁导发生变化,每转过一个转子齿距,气隙的磁导变化一个周期。当转子转过一圈时,则变化出与转子齿相同的数个周期。气隙磁导的变化导致输入和输出绕组之间互感的变化,输出绕组感应的电势也随之发生变化。输出绕组按正弦及余弦规律变化来判断转子的瞬间位置以及旋转的方向。
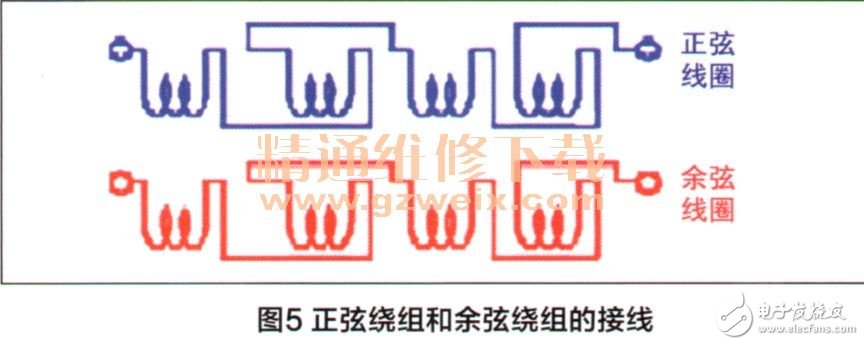
磁阻式旋转变压器结构简单、占用空间尺寸极小,且励磁绕组、正弦绕组和余弦绕组均固装在定子上,图5所示为正弦绕组与余弦绕组的接线示意图。它还采取无刷式结构,大大提高了系统的可靠性,其检测角位移精度极高,甚至可精确到“秒”,此外磁阻式旋转变压器的抗干扰能力较好,更适合车辆对电机驱动的多种要求。
二、旋转变压器精细检测电机转子位置详解
1.转子正上方位置时的感应电压
当励磁绕组输入有正弦激磁电流,若转子位于正上位,转子还处于相对静止时,正弦线圈有感应电压但余弦线圈无感应电压输出。图6所示为三个线圈上的电压信号波形。
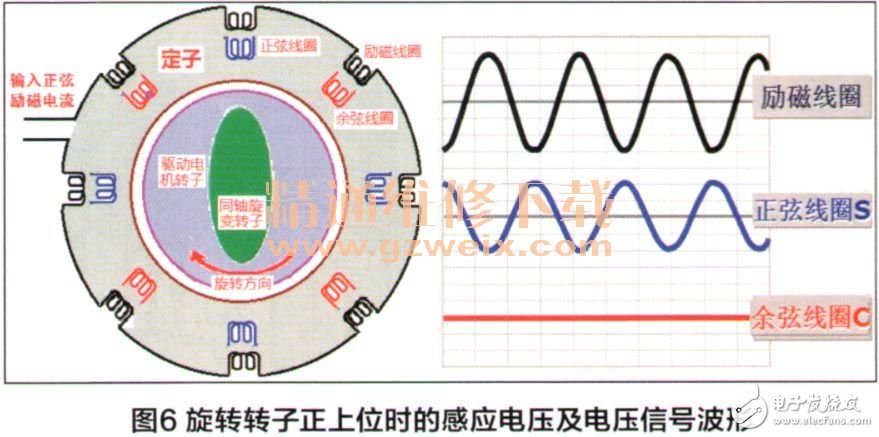
这时由于转子正对上方位置,与之最近的是定子上的正弦线圈,于是正弦线圈上感应有相位相反的正弦波电压,而余弦线圈位置与转子相差最远,故此时不产生感应电压。
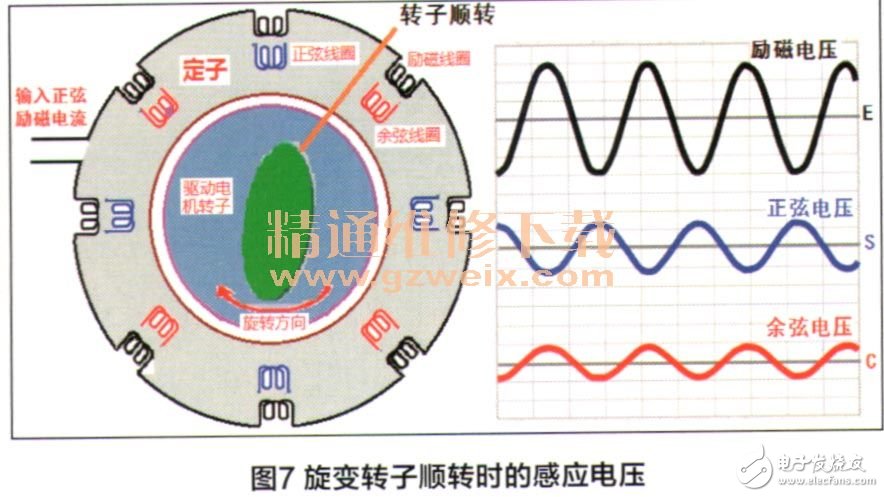
2.旋变转子顺转时的感应电压
由于转子旋转离开正上方位置后与正弦绕组的位置逐渐离开,其正弦感应电压下降,而余弦绕组中产生感应电压则逐步变大,但相位与正弦绕组的电压相反,与励磁绕组的相位相同。转子顺转时的感应电压如图7所示,若旋转变压器的转子继续旋转到正对余弦绕组的磁极时,即图7中旋变转子顺转45°,此时正弦绕组不产生感应电压信号,但余弦绕组将产生最大的电压信号。
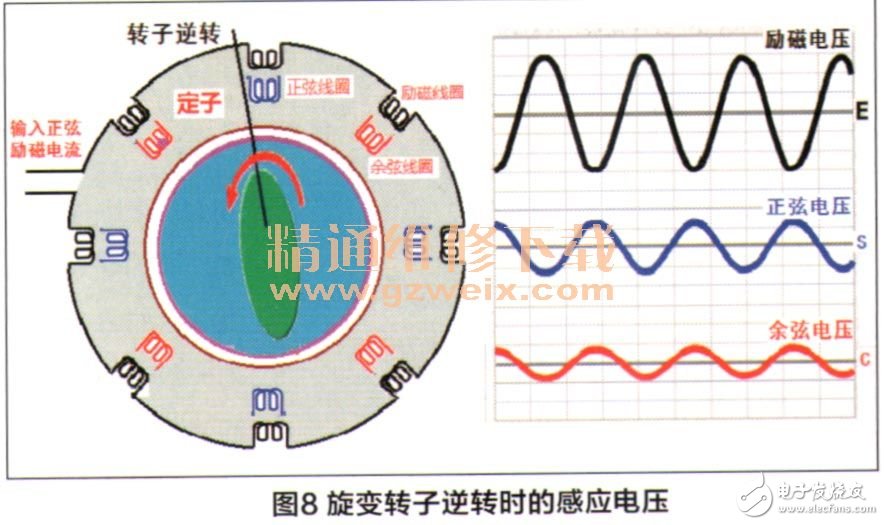
3.旋变转子逆转时的感应电压
由于旋转变压器的转子逆转离开正上方的正弦绕组磁极,反方向会逐步接近余弦绕组的磁极。此时正弦电压下降,而余弦电压逐渐增大,相位与励磁绕组的相反,也与顺转时转子的余弦电压相反,故可以借此来检测转子旋转的方向。图8所示为旋变转子逆转时的感应电压。
4.总结
通过比较旋转变压器转子的顺转与逆转、输出的电压信号波形的幅值大小及相位即可检测出转子当前的位置和旋转方向。同时通过计算信号波形的变化周期,即可准确判断出旋转变压器转子的转速。由此经变频器的门控驱动电路可控制驱动电机转速的高低,也就可调节车速的快慢。这种用电机调速的方式十分快捷,比传统汽车变速器改变转速的方式要简单方便得多。
由上述分析可见,利用旋转变压器能精细检测出驱动电机转子的瞬间位置、即时转速及旋转方向,而且使驱动电机的结构更紧凑、制作费用成本更低,所以磁阻式旋转变压器在电动车的驱动电机中广泛使用。