无刷直流电动机的组成与工作原理
(1)无刷电动机的组成
无刷直流电动机由转子和定子两大部分组成,如图3所示。

(2)无刷直流电动机的工作原理
无刷直流电动机采用方波自控式永磁同步电动机,以霍尔传感器取代电刷换向器,霍尔传感器的信号线传递电动机里面磁钢相对于绕组线圈的位根据3个霍尔传感器的信号能知道此时应该怎样给电动机的线圈供电(不同的霍尔信应该给电动机绕组提供相对应方向的电流),也就是说霍尔传感器状态不一样,线圈的置号电流方向不一样。
霍尔信号传递给控制器,控制器通过粗线(不是霍尔线)给电动机绕组供电,电动机旋转,磁钢与绕组(准确地说是缠在定子上的线圈,其实霍尔一般安装在定子上)发生转动,霍尔传感器感应出新的位置信号,控制器粗线又给重新改变电流方向的电动机绕组供电,电动机继续旋转(当绕组和磁钢的位置发生变化时,绕组必须对应地改变电流方向,这样电动机才能继续向一个方向运动,否则电动机就会在某一个位置左右摆动,而不是连续旋转),这个过程就是电子换向。
无刷直流电动机由直流电源供电,借助位置传感器来检测转子的位置,所检测出的信号触发相应的电子换相线路,以实现无接触式换相。
无刷直流电动机用电子开关和位置传感器代替电刷及换向器,将直流电转换成模拟三相交流电,通过调制脉宽,改变其电流大小来改变转速。
直流无刷电机的控制结构
直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:
N=120.F/P。在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
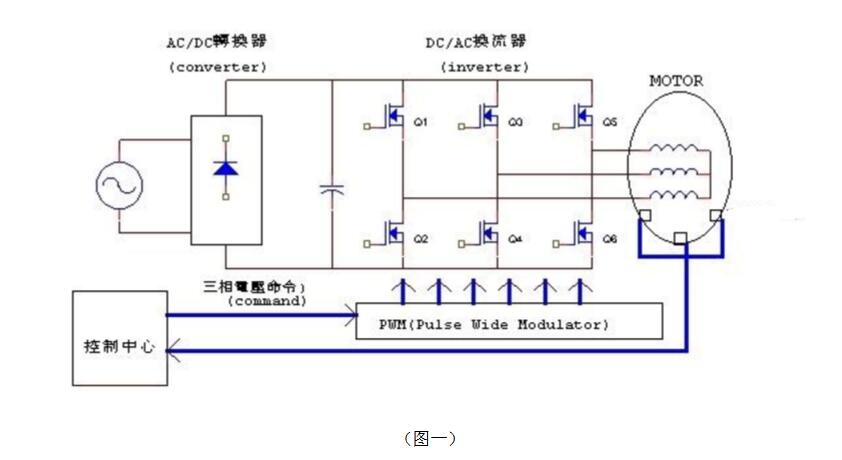
直流无刷驱动器包括电源部及控制部如图(1):电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220V),如果输入是交流电就得先经转换器(CONVERTER)转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(INVERTER)转成3相电压来驱动电机。换流器(INVERTER)一般由6个功率晶体管(Q1~Q6)分为上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(INVERTER)换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(HALL-SENSOR),做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。