HSD驱动灯的诊断问题
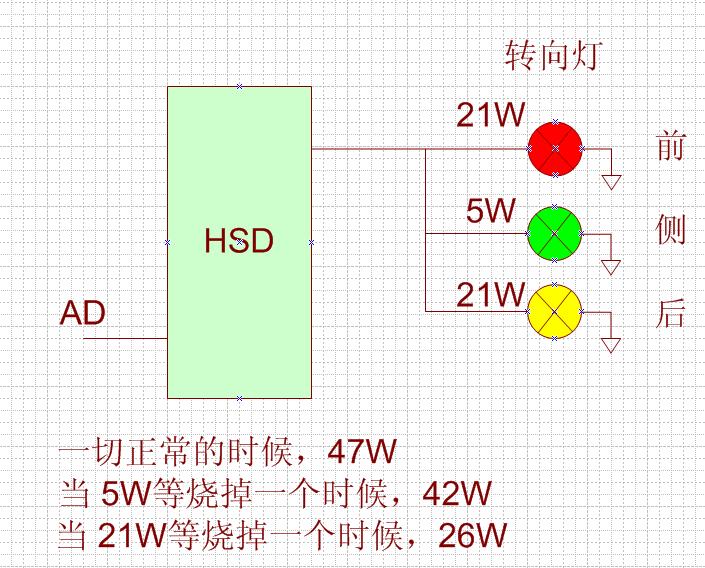
我们一般使用HSD驱动转向灯,转向灯有前后侧三个,一般分别为21W,21W,5W。转向灯非常重要,属于安全系统一部分,设想一下没有转向灯转弯是一件多么可怕的事情。因此我们需要认真对待转向灯的诊断问题。
下面介绍一下K值的概念,以 ST公司的HSD为例,ST的东西相对来说非常便宜,不过用的时候得注意设计,一般设计的时候冗余度比较小。
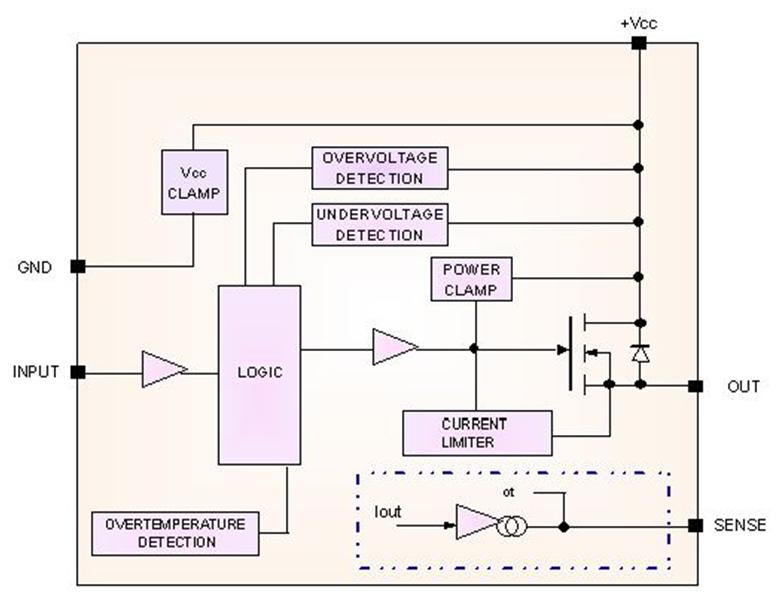
其内部电流镜像电路大致如图:

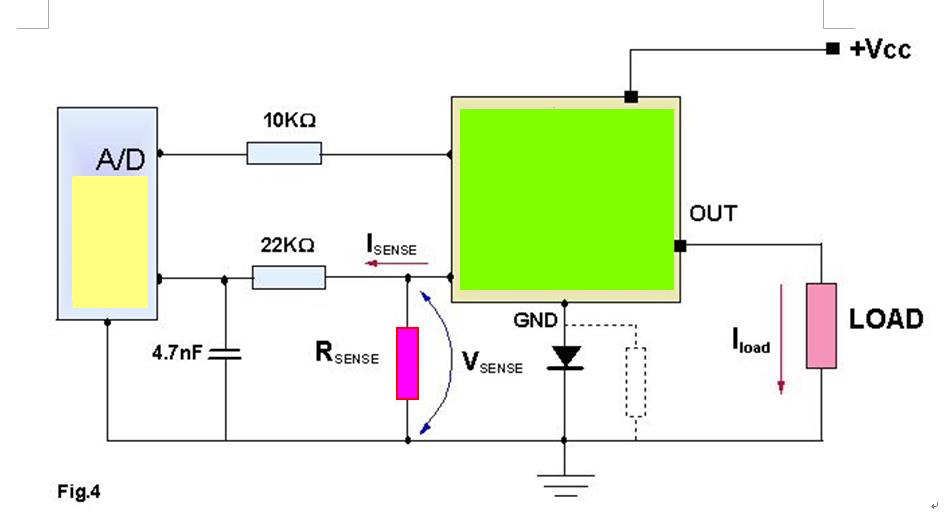
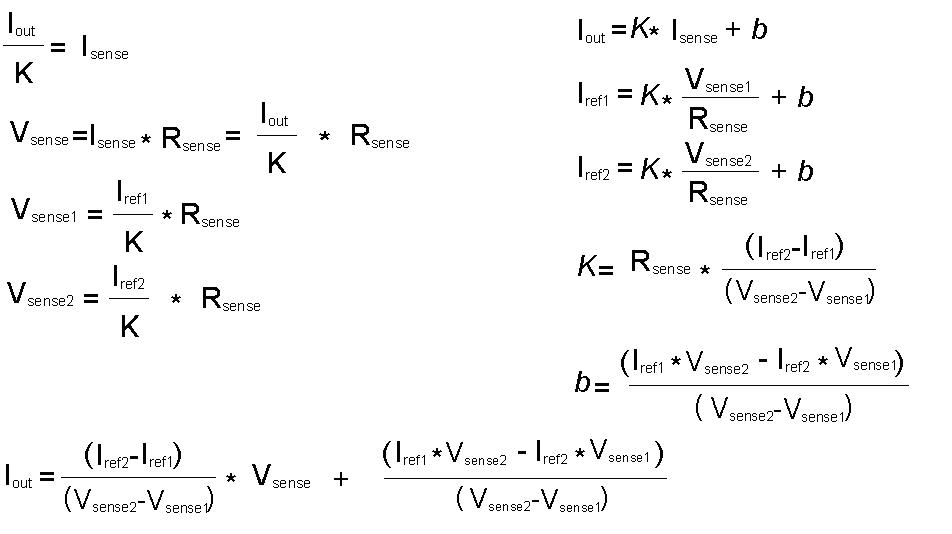
按照上面的接法,可以把K线性化,通过以下公式。
通过以下的一个流程图可以把上面的过程清晰的表达出来:
以上提出了一个诊断的问题,大致描述了K是怎么定义的,HSD内部关于镜像电流的结构和一些特性,以及HSD怎么样去线性化的问题。大部分摘自ST的应用文档。
这是第一部分的内容,第二部分将会主要介绍实际在灯诊断过程中如何计算的问题
下面介绍一下K值的概念,以 ST公司的HSD为例,ST的东西相对来说非常便宜,不过用的时候得注意设计,一般设计的时候冗余度比较小。
其内部电流镜像电路大致如图:
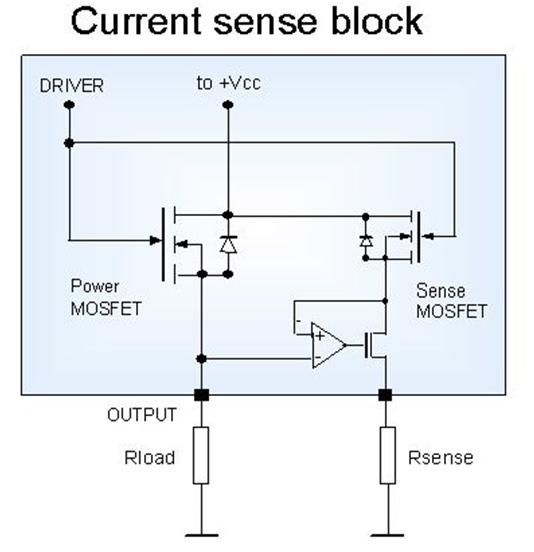
这里面有两个通路,一是电流通过 N沟道 MOS管和采样电阻 (Isense) ,另外一个是电流主通路由 N沟道 MOS和负载构成的。有以下的关系:Iload=K*Isense
K定义为两个沟道的电流比例。负载电流在输出引脚上产生一个压差Vds(on)
运算放大器比较Vds(on)和到内部参考电压VS;
如果Vds(on) < Vs,对检测电阻Vsense电压约为零。因此采样电流和与负载电流不成比例。
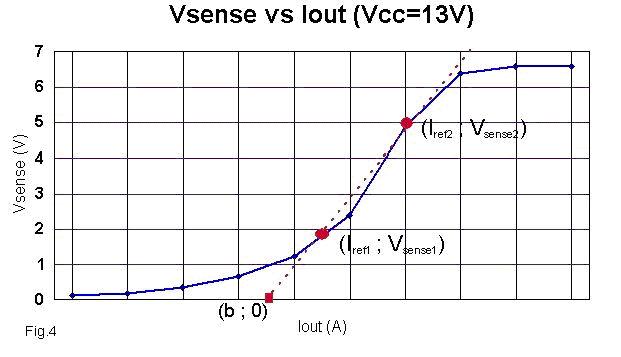
如果Vds(on) > Vs,电路控制采样电流,Vsense=(K/Rsense)*Iload.
如果发生短路故障:Vds(on)>>Vs。在此情况下Vsense是拉调升为电压VsenseH(典型值5.5伏)。
按照上面的接法,可以把K线性化,通过以下公式。
通过以下的一个流程图可以把上面的过程清晰的表达出来:
以上提出了一个诊断的问题,大致描述了K是怎么定义的,HSD内部关于镜像电流的结构和一些特性,以及HSD怎么样去线性化的问题。大部分摘自ST的应用文档。
这是第一部分的内容,第二部分将会主要介绍实际在灯诊断过程中如何计算的问题