间继电器作用是用来传递信号或同时控制多个电路,也可直接用它来控制小容量电动机或其他电气执行元件,它的结构和交流接触器基本相同,只是电磁系统小些,触点多些。继电器的工作原理是当某一输入量(如电压、电流、温度、速度、压力等)达到预定数值时,使它动作,以改变控制电路的工作状态,从而实现既定的控制或保护的目的。在此过程中,继电器主要起了传递信号的作用。常用的中间继电器主要有JZ7系列和JZ8系列两种,后者是交直流两用的。在选用中间继电器时,主要是考虑电压等级以及常开和常闭触点的数量。
讲解一下继电器的模块使用,以及引脚的定义。
首先说最普通的继电器模块吧(在本文图中就简称继电器了,仍然指继电器模块,请大家悉知),先上图:
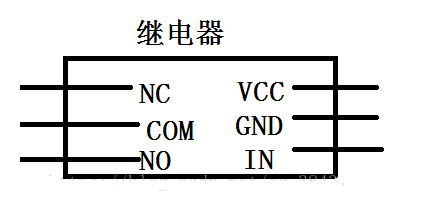
这个就是大概的引脚图,VCC就是电源正极,GND就是电源负极,IN是通断信号的输入引脚。
而另一边,NC即常闭端(normal close),COM即公共端,NO即常开端(normal open)。在中学物理中已经学过,开路即通路、断路,闭合指的是开关闭合,也就是说,在没有任何上电之类的动作时,NC和COM端相当于已经连通,这种继电器模块的连线一般为:
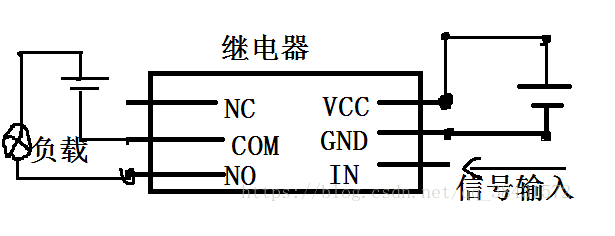
因为在一般情况下NC是闭合的,所以我们要接到NO接口,然后信号输入引脚即IN引脚给低电平,NC端断开,NO端闭合,负载端电路形成闭合回路,开始工作,当IN端给高电平时,NO端断开,负载即停止工作。
如果想一直工作,给信号停止工作,即把NO端的连线接在NC端就行了。(切记:继电器的GND要和单片机的GND接在一起共地,也可以使用同一个电源来达到共地的效果)
继电器被发明的目的使用来用弱电控制强电,保证人们不会在高压电路中因为某种因为发生危险(当然单片机使用的继电器模块驱动电流很小,甚至光耦隔离的继电器,只需要一个低电平的信号即可触发,并不需要太大的电流。如果是工业级的继电器,可能需要几安培的电流才能驱动,所以不建议大家使用)
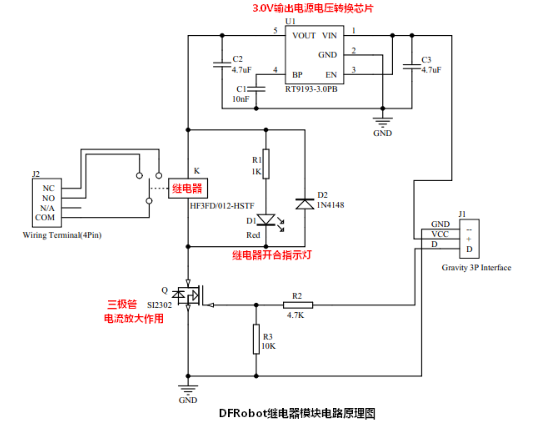
继电器模块的大概使用方法已经讲完了,下面介绍一下工作原理,先上图:
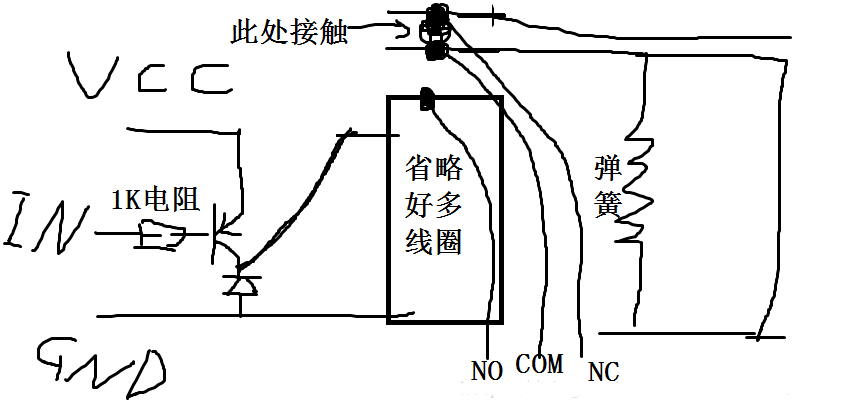
这个大概就是继电器模块内部的原理了(本人小白理解浅陋,如果有错误希望大家留言指正,我一定会修改错误)。
PS:图中为PNP型三极管,基极为0是,发射极有电压,三极管导通,所以给低电平会吸合。
当输入口给低电平时,这个线圈便会因为电生磁原理将COM端的动子吸下来,完成吸合。
DFRobot 继电器模块
供电电压:2.8V - 5.5V
控制信号:数字信号,高电平(2.8V以上)继电器吸合,低电平(0.5V以下)继电器断开
被控电路最大电流:10A
被控电路最大电压:250VAC
机械耐久性:100万
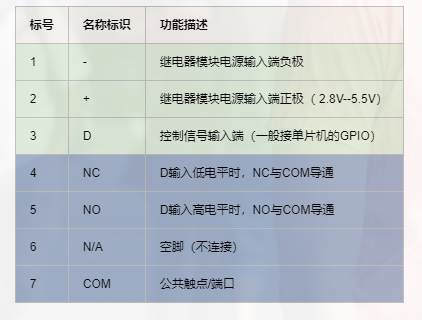
模块接线端口定义:
模块控制方法:
给控制端高电平时,继电器吸合(内部螺线管通电),NC端与COM端断开,NO端与COM端导通。模块上的指示LED灯点亮,同时听到清脆“啪”的一声。
给控制端低电平时,继电器断开(内部螺线管断电),NC端与COM端导通,NO与COM端不导通。模块上的指示LED灯熄灭。
模块电路原理图
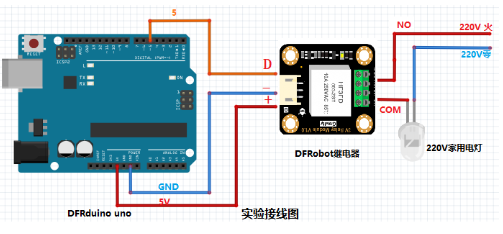
实验例子本实验使用继电器来控制220V家用电灯。最终效果是电灯以间隔2s的频率亮、暗。
提示:市电有危险,请严格按照规范要求来操作!非专业人士不要轻易做此实验。
实验接线图:
Arduino控制代码:
#define RELAY_PIN 5 //驱动继电器的引脚
void setup(void)
{
pinMode(RELAY_PIN,OUTPUT);
digitalWrite(RELAY_PIN,LOW); //初始化时继电器断开
}
void loop(void)
{
digitalWrite(RELAY_PIN,HIGH); //继电器闭合,NC端与COM端断开,NO端与COM端导通
delay(2000);
digitalWrite(RELAY_PIN,LOW); //继电器断开,NC端与COM端导通,NO与COM端不导通
delay(2000);
}