前言
我们伟大中华祖先的四大发明之一——指南针,可谓是无人不知啊,对于现代传感器技术来讲,它可算得上是磁传感器的鼻祖了。
而在当今的电子时代,磁传感器在电机、电力电子技术、汽车工业、工业自动控制、机器人、办公自动化、家用电器及各种安全系统等方面都有着广泛的应用。
磁传感器
磁传感器是一种把磁场、电流、应力应变、温度、光等外界因素引起的敏感元件磁性能变化转换成电信号,以这种方式来检测相应物理量的器件。用于感测速度、运动和方向,应用领域包括汽车、无线和消费电子、军事、能源、医疗和数据处理等。
磁传感器市场按照技术进步的发展,主要分为四大类:霍尔效应(Hall Effect)传感器、各向异性磁阻(AMR)传感器、巨磁阻(GMR)传感器隧道磁阻(TMR)传感器其中,霍尔效应传感器的历史最悠久,获得广泛应用。随着持续的技术研发,各种磁传感器诞生,并拥有更优异的性能、更高的可靠性。霍尔效应(Hall Effect)传感器1879年,美国物理学家霍尔在研究金属导电机制时发现了霍尔效应。但因金属的霍尔效应很弱而一直没有实际应用案例,直到发现半导体的霍尔效应比金属强很多,利用这种现象才制作了霍尔元件。在半导体薄膜两端通以控制电流 I,并在薄膜的垂直方向施加磁感应强度为B的匀强磁场,半导体中的电子与空穴受到不同方向的洛伦兹力而在不同方向上聚集,在聚集起来的电子与空穴之间会产生电场,电场强度与洛伦兹力产生平衡之后,不再聚集,这个现象叫做霍尔效应。在垂直于电流和磁场的方向上,将产生的内建电势差,称为霍尔电压U。霍尔电压U与半导体薄膜厚度d,电场B和电流I的关系为U=k(IB/d)。这里k为霍尔系数,与半导体磁性材料有关。

霍尔效应示意图
霍尔传感器利用霍尔效应的原理制作,主要有霍尔线性传感器、霍尔开关和磁力计三种。1. 线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,它输出模拟量。输出电压与外加磁场强度呈线性关系,如下图所示,在B1~B2的磁感应强度范围内有较好的线性度,磁感应强度超出此范围时则呈现饱和状态。
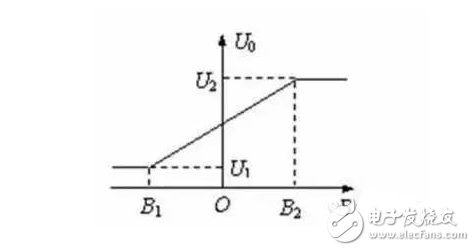
线性型霍尔传感器工作原理
霍尔线性器件拥有很宽的磁场量测范围,并能识别磁极。其应用领域有电力机车、地下铁道、无轨电车、铁路等,还可用于变频器中用于监控电量、光伏直流柜监测光伏汇流箱实时输出电流的作用、电动机保护等。 线性霍尔传感器还可以用于测量位置和位移,霍尔传感器可用于液位探测、水流探测等。2. 开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,它输出数字量。
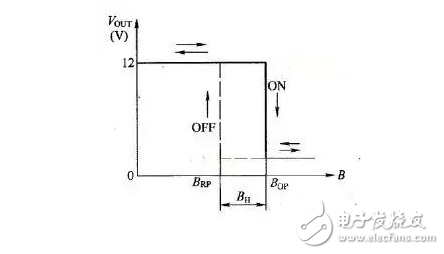
开关型霍尔传感器工作原理
霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高,工作温度范围宽,可达-55℃~150℃。开关型霍尔传感经过一次磁场强度的变化,则完成了一次开关动作,输出数字信号,可以计算汽车或机器转速、ABS系统中的速度传感器、汽车速度表和里程表、机车的自动门开关、无刷直流电动机、汽车点火系统、门禁和防盗报警器、自动贩卖机、打印机等。3. 磁力计
是利用霍尔效应产生的电势差来测算外界磁场的大小和极性。磁力计是采用CMOS工艺的平面器件。工艺相对一般IC更为简单,一般采用P型衬底上N阱上形成传感器件,通过金属电极将传感器与其他电路(如放大器、调节处理器等)相连。
但这样设计的的霍尔传感器只能感知垂直于管芯表面的的磁场变化,因此增加了磁通集中器(magnetic flux concentrator),工艺上来讲就是做原来的管芯上增加一层坡莫合金,可探测平行于管芯方向的磁场。由此,霍尔传感器实现了从单轴到三轴磁力计的跨越式发展。
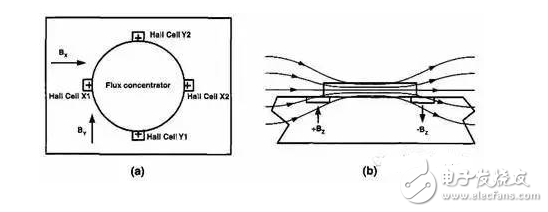
图(a)增加磁通集中器的霍尔传感器的顶视图
图(b)增加磁通集中器的霍尔传感器的剖面图磁力计广泛应用于智能手机、平板电脑和导航设备等移动终端,拥有巨大的市场前景。同时,磁力计可以与加速度计组成6轴电子罗盘,三种惯性传感器(加上陀螺仪)组合在一起还能实现9轴组合传感器,构成更强大的惯性导航产品。各向异性磁阻(AMR)传感器某些金属或半导体在遇到外加磁场时,其电阻值会随着外加磁场的大小发生变化,这种现象叫做磁阻效应,磁阻传感器利用磁阻效应制成。
1857年,Thomson发现坡莫合金的的各向异性磁阻效应。对于有各向异性特性的强磁性金属, 磁阻的变化是与磁场和电流间夹角有关的。我们常见的这类金属有铁、钴、镍及其合金等。
当外部磁场与磁体内建磁场方向成零度角时, 电阻是不会随着外加磁场变化而发生改变的;但当外部磁场与磁体的内建磁场有一定角度的时候, 磁体内部磁化矢量会偏移,薄膜电阻降低, 我们对这种特性称为各向异性磁电阻效应(Anisotropic Magnetoresistive Sensor,简称AMR)。磁场作用效果下图。
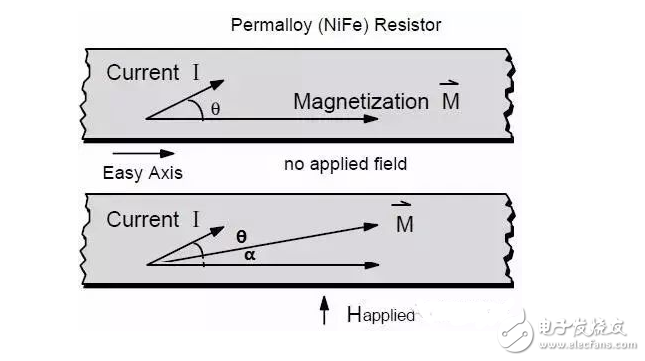
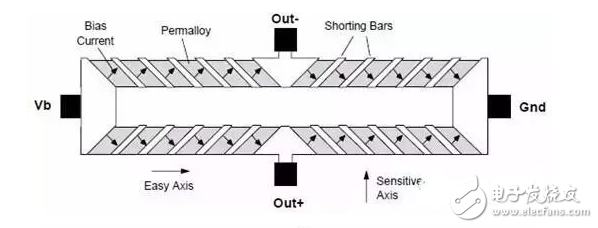
坡莫合金的AMR效应
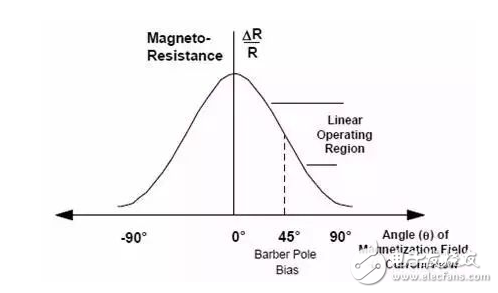
磁阻变化值与角度变化的关系
薄膜合金的电阻R就会因角度变化而变化,电阻与磁场特性是非线性的,且每一个电阻并不与唯一的外加磁场值成对应关系。从上图中,我们可以看到,当电流方向与磁化方向平行时,传感器最敏感,在电流方向和磁化方向成45度角度时,一般磁阻工作于图中线性区附近,这样可以实现输出的线性特性。AMR磁传感器的基本结构由四个磁阻组成了惠斯通电桥。其中供电电源为Vb,电流流经电阻。当施加一个偏置磁场H在电桥上时,两个相对放置的电阻的磁化方向就会朝着电流方向转动,这两个电阻的阻值会增加;而另外两个相对放置的电阻的磁化方向会朝与电流相反的方向转动,该两个电阻的阻值则减少。通过测试电桥的两输出端输出差电压信号,可以得到外界磁场值。
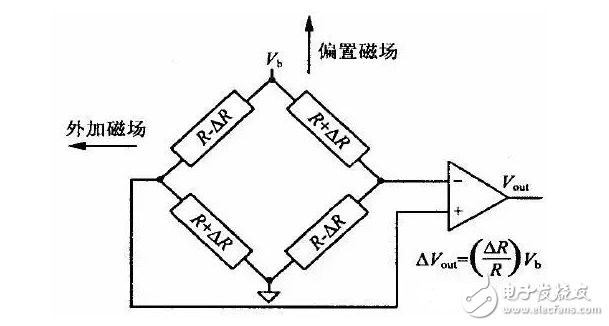
AMR磁阻传感器等效电路
各向异性磁阻(AMR)技术的优势有以下几点:1. 各向异性磁阻(AMR)技术最优良性能的磁场范围是以地球磁场为中心,对于以地球磁场作为基本操作空间的传感器应用来说,具有广大的运作空间,无需像霍耳元件那样增加聚磁等辅助手段。2. 各向异性磁阻(AMR)技术是唯一被验证,可以达到在地球磁场中测量方向精确度为一度的半导体工艺技术。其他可达到同样精度技术都是无法与半导体集成的工艺。因此,AMR可与CMOS或MEMS集成在同一硅片上并提供足够的精确度。3. AMR技术只需一层磁性薄膜,工艺简单,成本低,不需要昂贵的制造设备,具有成本优势。4. AMR技术具有高频、低噪和高信噪比特性,在各种应用中尚无局限性。AMR磁阻传感器可以很好地感测地磁场范围内的弱磁场测量,制成各种位移、角度、转速传感器,各种接近开关,隔离开关,用来检测一些铁磁性物体如飞机、火车、汽车。其它应用包括各种导航系统中的罗盘,计算机中的磁盘驱动器,各种磁卡机、旋转位置传感、电流传感、钻井定向、线位置测量、偏航速率传感器和虚拟实景中的头部轨迹跟踪。巨磁阻(GMR)传感器 与霍尔(Hall)传感器和各向异性磁阻(AMR)传感器相比,巨磁阻(GMR, Giant Magneto Resistance)传感器要年轻的多!这是因为GMR效应的发现比霍尔效应和AMR效应晚了100多年。1988年,德国科学家格林贝格尔发现了一特殊现象:非常弱小的磁性变化就能导致磁性材料发生非常显著的电阻变化。同时,法国科学家费尔在铁、铬相间的多层膜电阻中发现,微弱的磁场变化可以导致电阻大小的急剧变化,其变化的幅度比通常高十几倍。费尔和格林贝格尔也因发现巨磁阻效应而共同获得2007年诺贝尔物理学奖。一般的磁铁金属,在加磁场和不加磁场下电阻率的变化为1%~3%,但铁磁金属/非磁性金属/铁磁金属构成的多层膜,在室温下可以达到25%,低温下更加明显,这也是巨磁阻效应的命名缘由。
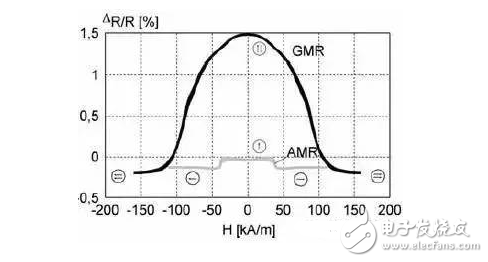
GMR和AMR在外加磁场下电阻率变化示意图
“巨”(giant)来描述此类磁电阻效应,并非仅来自表观特性,还由于其形成机理不同。常规磁电阻源于磁场对电子运动的直接作用,呈各向异性磁阻,即电阻与磁化强度和电流的相对取向有关。相反,GMR磁阻呈各向同性,与磁化强度和电流的相对取向基本无关。
巨磁阻效应仅依赖于相邻磁层的磁矩的相对取向,外磁场的作业只是为了改变相邻铁磁层的磁矩的相对取向。除此以外,GMR效应更重要的意义是为进一步探索新物理——比如隧穿磁阻效应(TMR: Tunneling Magnetoresistance)、自旋电子学(Spintronics)以及新的传感器技术奠定了基础。
GMR效应的首次商业化应用是1997年,由IBM公司投放市场的硬盘数据读取探头。到目前为止,巨磁阻技术已经成为全世界几乎所有电脑、数码相机、MP3播放器的标准技术。 GMR传感器的材料结构具有GMR效应的材料主要有多层膜、颗粒膜、纳米颗粒合金薄膜、磁性隧道结合氧化物、超巨磁电阻薄膜等五种材料。其中自旋阀型多层膜的结构在当前的GMR磁阻传感器中应用比较广泛。自旋阀主要有自由层(磁性材料FM),隔离层(非磁性材料NM),钉扎层(磁性材料FM)和反铁磁层(AF)四层结构。
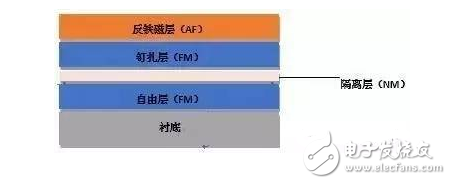
自旋阀GMR磁阻传感器基本结构
GMR磁阻传感器由四个巨磁电阻构成惠斯通电桥结构,该结构可以减少外界环境对传感器输出稳定性的影响,增加传感器灵敏度。当相邻磁性层磁矩平行分布,两个FM/NM界面呈现不同的阻态,一个界面为高阻态,一个界面为低阻态,自旋的传导电子可以在晶体内自由移动,整体上器件呈现低阻态;而当相邻磁性层磁矩反平行分布,两种自旋状态的传导电子都在穿过磁矩取向与其自旋方向相同的一个磁层后,遇到另一个磁矩取向与其自旋方向相反的磁层,并在那里受到强烈的散射作用,没有哪种自旋状态的电子可以穿越FM/NM界面,器件呈现高阻态。
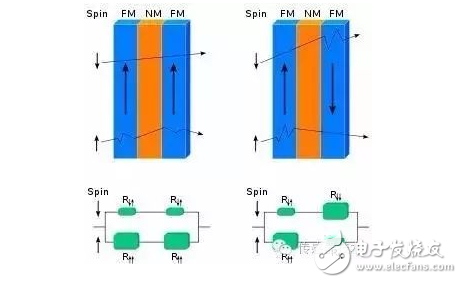
平行磁场和反平行磁场作用下的等效电路图
GMR磁阻传感器商业化时间晚于霍尔传感器和AMR磁阻传感器,制造工艺相对复杂,生产成本也较高。但其具有灵敏度高、能探测到弱磁场且信号好,温度对器件性能影响小等优点,因此市场占有率呈稳定状态。GMR磁阻传感器在消费电子、工业、国防军事及医疗生物方面均有所涉及。隧道磁阻(TMR)传感器
早在1975年,Julliere就在Co/Ge/Fe磁性隧道结(MagneticTunnelJunctions,MTJs)中观察到了TMR(Tunnel Magneto-Resistance)效应。但是,这一发现当时并没有引起人们的重视。在此后的十几年里,有关TMR效应的研究进展十分缓慢。在GMR效应的深入研究下,同为磁电子学的TMR效应才开始得到重视。2000年,MgO作为隧道绝缘层的发现为TMR磁阻传感器的发展契机。
2001年,Butler和Mathon各自做出理论预测:以铁为铁磁体和MgO作为绝缘体,隧道磁电阻率变化可以达到百分之几千。同年,Bowen等首次用实验证明了磁性隧道结(Fe/MgO/FeCo)的TMR效应。2008年,日本东北大学的S. Ikeda, H. Ohno团队实验发现磁性隧道结CoFeB/MgO/CoFeB的电阻率变化在室温下达到604%,在4.2K温度下将超过1100%。TMR效应具有如此大的电阻率变化,因此业界越来越重视TMR效应的研究和商业产品开发。
TMR元件在近年才开始工业应用的新型磁电阻效应传感器,其利用磁性多层膜材料的隧道磁电阻效应对磁场进行感应,比之前所发现并实际应用的AMR元件和GMR元件具有更大的电阻变化率。我们通常也用磁隧道结(Magnetic Tunnel Junction,MTJ)来代指TMR元件,MTJ元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更好的线性度,相对于霍尔元件不需要额外的聚磁环结构,相对于AMR元件不需要额外的set/reset线圈结构。 TMR磁阻传感器的材料结构及原理
从经典物理学观点看来,铁磁层(F1)+绝缘层(I)+铁磁层(F2)的三明治结构根本无法实现电子在磁层中的穿通,而量子力学却可以完美解释这一现象。当两层铁磁层的磁化方向互相平行,多数自旋子带的电子将进入另一磁性层中多数自旋子带的空态,少数自旋子带的电子也将进入另一磁性层中少数自旋子带的空态,总的隧穿电流较大,此时器件为低阻状态;
当两层的磁铁层的磁化方向反平行,情况则刚好相反,即多数自旋子带的电子将进入另一磁性层中少数自旋子带的空态,而少数自旋子带的电子也进入另一磁性层中多数自旋子带的空态,此时隧穿电流较小,器件为高阻状态。
可以看出,隧道电流和隧道电阻依赖于两个铁磁层磁化强度的相对取向,当磁化方向发生变化时,隧穿电阻发生变化,因此称为隧道磁电阻效应。
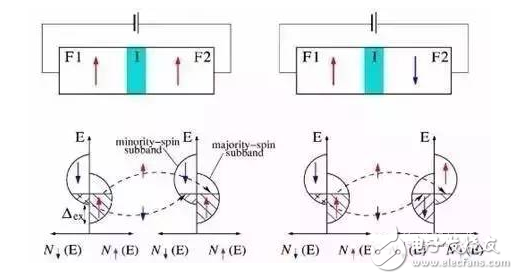
TMR磁化方向平行和反平行时的双电流模型
TMR元件在近年才开始工业应用的新型磁电阻效应传感器,其利用磁性多层膜材料的隧道磁电阻效应对磁场进行感应,比之前所发现并实际应用的AMR元件和GMR元件具有更大的电阻变化率。我们通常也用磁隧道结(Magnetic Tunnel Junction,MTJ)来代指TMR元件,MTJ元件具有更好的温度稳定性,更高的灵敏度,更低的功耗,更好的线性度,相对于霍尔元件不需要额外的聚磁环结构,相对于AMR元件不需要额外的set/reset线圈结构。下表是霍尔元件、AMR元件、GMR元件以及TMR元件的技术参数对比,可以更清楚直观的看到各种技术的优劣。
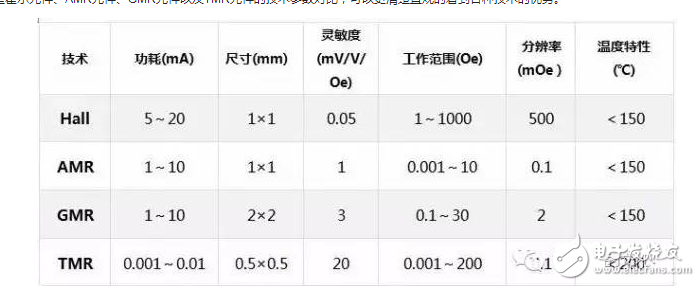
霍尔元件、AMR元件、GMR元件以及TMR元件的技术参数对比
作为GMR元件的下一代技术,TMR(MTJ)元件已完全取代GMR元件,被广泛应用于硬盘磁头领域。相信TMR磁传感技术将在工业、生物传感、磁性随机存储(Magnetic Random Access Memory,MRAM)等领域有极大的发展与贡献。磁传感器的发展,在本世纪70~80 年代形成高潮。90 年代是已发展起来的这些磁传感器的成熟和完善的时期。
磁传感器的应用十分广泛,已在国民经济、国防建设、科学技术、医疗卫生等领域都发挥着重要作用,成为现代传感器产业的一个主要分支。在传统产业应用和改造、资源探查及综合利用、环境保护、生物工程、交通智能化管制等各个方面,它们发挥着愈来愈重要的作用。