霍尔传感器是根据霍尔效应制作的一种磁场传感器。霍尔效应是磁电效应的一种,这一现象是霍尔(A.H.Hall,1855—1938)于1879年在研究金属的导
电机构时发现的。后来发现
半导体、导
电流体等也有这种效应,而半导体的霍尔效应比金属强得多,利用这现象制成的各种霍尔元件,广泛地应用于
工业自动化技术、
检测技术及
信息处理等方面。霍尔效应是研究半导体材料性能的基本方法。通过霍尔效应实验测定的霍尔系数,能够判断半导体材料的导电类型、载流子浓度及载流子迁移率等重要
参数。
磁场中有一个霍尔半导体片,恒定电流I从A到B通过该片。在洛仑兹力的作用下,I的
电子流在通过霍尔半导体时向一侧偏移,使该片在CD方向上产生电位差,这就是所谓的霍尔电压。
霍尔电压随磁场强度的变化而变化,磁场越强,电压越高,磁场越弱,电压越低,霍尔电压值很小,通常只有几个毫伏,但经
集成电路中的
放大器放大,就能使该电压放大到足以输出较强的
信号。若使霍尔集成电路起传感作用,需要用
机械的方法来改变磁感应强度。下图所示的方法是用一个转动的叶轮作为控制磁通量的开关,当叶轮叶片处于磁铁和霍尔集成电路之间的气隙中时,磁场偏离集成片,霍尔电压消失。这样,霍尔集成电路的输出电压的变化,就能表示出叶轮驱动轴的某一位置,利用这一工作原理,可将霍尔集成电路片用作用点火正时传感器。霍尔效应传感器属于被动型传感器,它要有外加
电源才能工作,这一特点使它能检测转速低的运转情况。
霍尔效应
霍尔效应从本质上讲是运动的带电粒子在磁场中受洛仑兹力作用引起的偏转。当带电粒子(电子或空穴)被约束在固体材料中,这种偏转就导致在垂直电流和磁场的方向上产生正负电荷的聚积,从而形成附加的横向电场。对于图一所示的半导体试样,若在X方向通以电流Is,在Z方向加磁场B,则在Y方向即试样A,A′电极两侧就开始聚积异号电荷而产生相应的附加电场。电场的指向取决定于测试样品的电类型。显然,该电场是阻止载流子继续向侧面偏移,
当载流子所受的横向电场力eEH与洛仑兹力相等时,样品两侧电荷的积累就达到平衡,故有
⑴
其中EH为霍尔电场,V是载流子在电流方向上的平均漂移速度。设试样的宽为b,厚度为d,载流子浓度为n,则
⑵
由⑴、⑵两式可得
⑶
即霍尔电压VH(A、A′电极之间的电压)与ISB乘积正比与试样厚度d成反比。比例系数 称为霍尔系数,它是反映材料霍尔效应强弱的重要参数,只要测出 VH(伏)以及知道IIs(安)、B(高斯)和d(厘 米)可按下式计算RH(厘米3/库仑)
分类
霍尔传感器分为线型霍尔传感器和开关型霍尔传感器两种。
(一)开关型霍尔传感器由稳压器、霍尔元件、
差分放大器,斯密特触发器和输出级组成,它输出数字量。开关型霍尔传感器还有一种特殊的形式,称为锁键型霍尔传感器。
(二)线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,它输出
模拟量。
线性霍尔传感器又可分为开环式和闭环式。闭环式霍尔传感器又称零磁通霍尔传感器。线性霍尔传感器主要用于交直流电流和电压测量。。
开关型
如图4所示,其中Bnp为工作点“开”的磁感应强度,BRP为释放点“关”的磁感应强度。当外加的磁感应强度超过动作点Bnp时,传感器输出低电平,当磁感应强度降到动作点Bnp以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bnp与BRP之间的滞后使开关动作更为可靠。
锁键型
如图5所示,当磁感应强度超过动作点Bnp时,传感器输出由高电平跃变为低电平,而在外磁场撤消后,其输出状态保持不变(即锁存状态),必须施加反向磁感应强度达到BRP时,才能使电平产生变化。
线性型
输出电压与外加磁场强度呈线性关系,如图3所示,可见,在B1~B2的磁感应强度范围内有较好的线性度,磁感应强度超出此范围时则呈现饱和状态。
开环式电流传感器
由于通电螺线管内部存在磁场,其大小与导线中的电流成正比,故可以利用霍尔传感器测量出磁场,从而确定导线中电流的大小。利用这一原理可以设计制成霍尔电流传感器。其优点是不与被测电路发生电接触,不影响被测电路,不消耗被测电源的功率,特别适合于大电流传感。
霍尔电流传感器工作原理如图6所示,标准圆环铁芯有一个缺口,将霍尔传感器插入缺口中,圆环上绕有线圈,当电流通过线圈时产生磁场,则霍尔传感器有信号输出。
闭环式电流传感器
磁平衡式电流传感器也叫霍尔闭环电流传感器,也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿, 从而使霍尔器件处于检测零磁通的工作状态。
磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上, 所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is。 这一电流再通过多匝绕组产生磁场 ,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场, 使霍尔器件的输出逐渐减小。当与Ip与匝数相乘 所产生的磁场相等时,Is不再增加,这时的霍尔器件起指示零磁通的作用 ,此时可以通过Is来平衡。被测电流的任何变化都会破坏这一平衡。 一旦磁场失去平衡,霍尔器件就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。
这三种传感器中,模拟霍尔和霍尔磁力传感器的S引脚输出的是模拟值,线性霍尔的A0引脚输出的是模拟值,D0引脚输出的是开关量。
采用下面的代码分别对这三种传感器的模拟值引脚输出进行监测。
const int buttonPin = A0;
int inputValue = 0;
void setup() {
pinMode(buttonPin, INPUT);
digitalWrite(buttonPin,LOW);
Serial.begin(9600);
}
void loop() {
inputValue = analogRead(buttonPin);
Serial.println(inputValue);
}
将输出值放到matlab中创建图形,图形分别如下:
模拟霍尔传感器的模拟引脚输出图形如下,这是用手拿着磁铁从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
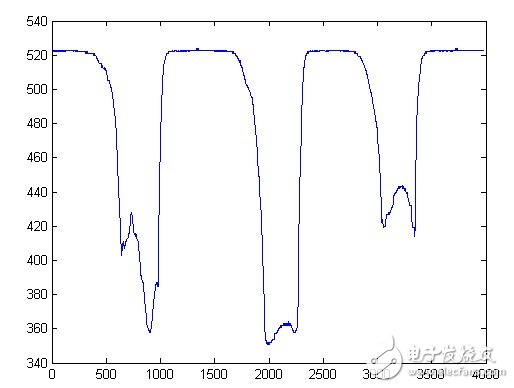
霍尔磁力传感器的模拟引脚输出图形如下,这是用手拿着磁铁多次从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
线性霍尔传感器的模拟引脚输出图形如下,这是用手拿着磁铁多次从远及近靠近传感器产生的模拟值图形,曲线最低处是磁铁与传感器距离最近时的输出。
由于线性霍尔传感器和霍尔磁力传感器上自带有测试LED(线性霍尔传感器上带绿色LED,霍尔磁力传感器上带红色LED),当传感器接近磁铁时,测试LED灯会自动变亮,所以就没有写另外的测试程序了(如果要写的话,就是检测传感器模拟引脚值,当小于某一值时点亮LED灯)。只是做了一个简单的测试视频,视频如下:
PS:模拟霍尔传感器正面接触磁铁时,模拟引脚输出值最低(下左图),反面接触时最高(下右图),另外两类传感器与模拟霍尔传感器正好相反。