模糊传感器是在经典传感器数值测量的基础上,经过模糊推理与知识集成,以自然语言符号描述的形式输出测量结果的智能传感器。
模糊传感器的结构
模糊传感器的简化结构图如图3所示。可见,模糊传感器主要由传统的数值测量单元和数值-符号转换单元组成。其核心部分就是数值-符号转换单元。但在数值-符号转换单元中进行的数值模糊化转换为符号的工作必须在专家的指导下进行。
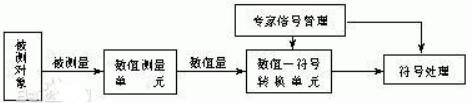
图3 模糊传感器结构示意图
模糊传感器的实现方法
综上所述,要实现模糊传感器就在于寻找测量数值与模糊语言之间的变换方法,即数值的模糊化,来生成相应的语言概念。所谓语言概念生成就是要定义一个模糊语言映射作为数值域到语言域的模糊关系,从而将数值域中的数值量映射到符号域上,以实现模糊传感器的功能。这里的语言值用模糊集合来表示,模糊集合则由论域和隶属函数构成。因此模糊语言映射就是要求取相应语言概念所对应数值域上的模糊隶属函数。如何进行概念生成是实现模糊传感器的关键。有很多方法可以实现模糊传感器的功能。
国外很多学者对模糊传感器的实现方法进行过讨论,这里简要介绍几种:
Foulloy算法简介:模糊传感器设计的实质是模糊变换算法的设计,即参考集的选择与模糊量化。其过程是首先根据专家或熟练工人的知识和经验获取相应测量领域的一级数值/语言变换策略,然后应用模糊推理方法求取相应隶属函数。Foulloy提出了基于语义关系的概念生成方法,首先,由论域的意义来定义一个通用的概念,称属概念,使之对应数值域中论域上的主要区间,然后在此基础上定义新概念,以产生其它语义值及其意义,新概念通过语言修正器内部自动生成。Foulloy还提出了基于已知点集通过内插方法实现的模糊状态传感器,每一学习点通过Delaunay三角法在测量空间的笛卡尔积上构造模糊分割,三角法用于建立与过程状态相关的符号的模糊意义。
Benoit E等人讨论了使用符号信息时,符号语义与被测量信息在特定任务环境下的关系,认为模糊传感器必须根据测量关系来构造,并且应该可以重组以适应不同的测量关系。并提出了将基础概念作为先验信息提供给传感器,其余概念由运算自动生成的设计思想。这种方法保留了概念之间的相对语义,但不能保证与测量关系符号说明的一致性,因此必须考虑环境对测量关系的修正问题,他提出了基于定性学习以及通过复合调节说明的函数方法来进行修正。他提出了基于Delaunay多维空间的三角测量的线性插值来构造模糊分割的新方法,用以建立采用多元件测量的模糊传感器。
Stipanicer D等人认为模糊传感器是一种智能测量设备,由简单选择的传感器和推理器组成,将被测量转换为适于人类感知和理解的信号。由于知识库中存储了丰富的专家知识和经验,它可以通过简单、廉价的传感器测量相当复杂的现象。
模糊传感器的应用
模糊传感器已被广泛应用,而且已进入平常百姓家,如模糊控制洗衣机中布量检测、水位检测、水的浑浊度检测,电饭煲中的水、饭量检测,模糊手机充电器等。另外,模糊距离传感器、模糊温度传感器、模糊色彩传感器等也是国外专家们研制的成果。随着科技的发展,科学分支的相互融合,模糊传感器也应用到了神经网络、模式识别等体系中。
责任编辑:YYX