Infineon公司的TLE4943是一款集成式有源磁场传感器,适用于基于霍尔技术的车轮速度应用。
它的基本功能是测量磁极轮或铁磁齿轮的速度。
它具有使用AK协议进行通信的两线电流接口。
该协议除了提供速度信号外,还提供其他信息,如车轮旋转方向和气隙信息。
该传感器将快速上电时间和低截止频率结合在一起。
出色的灵敏度和准确性,加上宽广的工作温度范围,使该传感器非常适合苛刻的汽车要求。
TLE4943C还提供了一个过模制的1.8nF电容器,以改善EMC性能。
TLE4943的基本操作是测量铁磁或永磁目标轮的差分磁场,并生成代表这些物体运动的输出信号。
另外,检测旋转的目标轮的旋转方向和磁信号的质量(强度)。
对于带有铁磁齿轮的应用,需要一个反向偏置磁铁。
磁测量基于集成在IC上的三个等距霍尔元件。
两个外部霍尔元件之间的距离为2.5mm,第三个霍尔元件放置在外部霍尔元件之间的中间。
外霍尔元件产生一个差分信号,该信号对应于被检测物体的速度。
所有三个霍尔元件均用于方向检测信息。
该IC具有三级电流接口,该接口对应于本数据手册下文所述的AK协议。
高达+/- 30mT的磁偏移通过自校准算法消除。
在启动(未校准模式)后仅需几个磁性边沿即可完成自校准并在校准模式下提供经过偏移校正的信号。
与模式无关,编码器的每个增量都会触发信号输出。
输出信号频率代表增量频率,例如每秒100增量等于100Hz。
磁信号的频率是输出信号频率的一半。 目前受国际大环境影响,TLE4943缺货比较严重,国内厂家推出了相应的替代产品,下面我们来了解一下知名半导体厂商意瑞半导体的产品及相关输出协议:
1. 简介
意瑞半导体的轮速传感器芯片提供了几种不同的输出协议,每种输出协议对应的输出信号都有一些区别,对应不同的应用场景以及程序需求。根据特定情况选取一个合适的轮速传感器输出协议非常重要。
本文会介绍不同输出协议的区别及优劣势,如表1,总结了最常用的几种轮速传感器的输出协议。(*产品型号尾缀“C”的版本代表内置电容。)
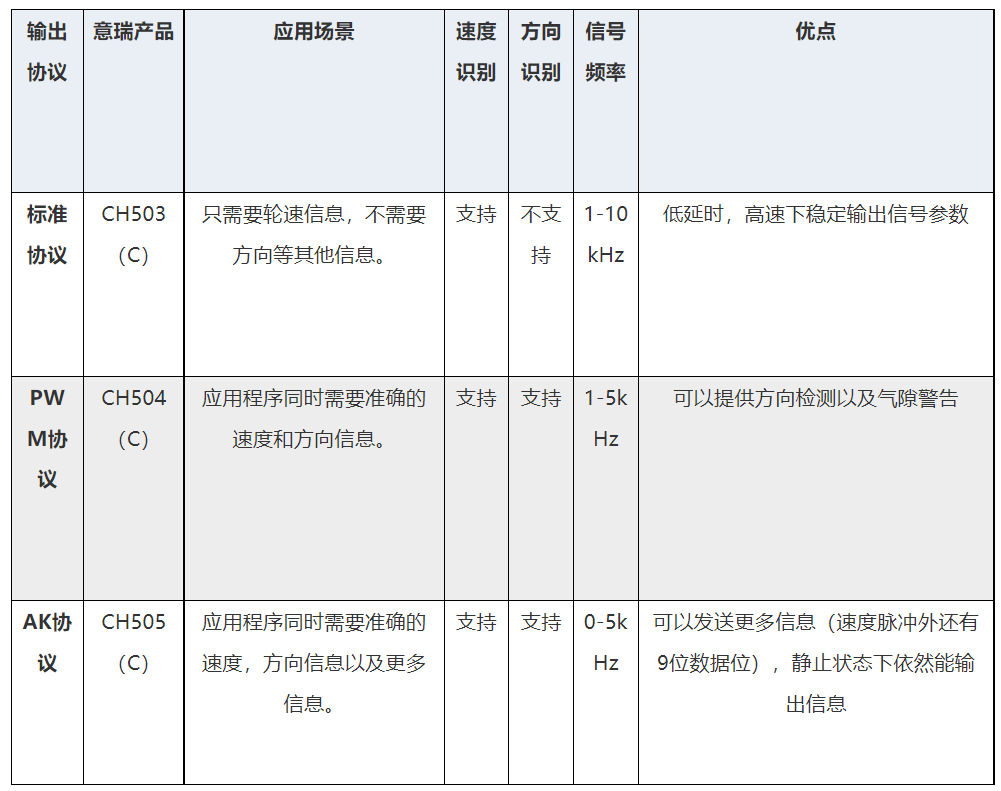
表1 轮速传感器芯片输出协议总结
*产品型号尾缀“C”的版本代表内置电容。
2. 标准协议
轮速传感器在测量齿轮转速时,被测量的运动部件会经过传感器的前端,引起磁力线密度的变化。
标准协议是轮速传感器中最简单的协议,CH503(C)内置两个霍尔盘,将霍尔盘间的差分信号调整并且放大,当输入信号越过其最大值和最小值的算术平均值时发生切换(例如正弦信号的过零点),即输出从ON变为OFF,反之亦然。
一个有效的传感器输出只能处于OFF或ON两种状态,分别用低电流和高电流表示,最终输出方波信号,如图1所示。
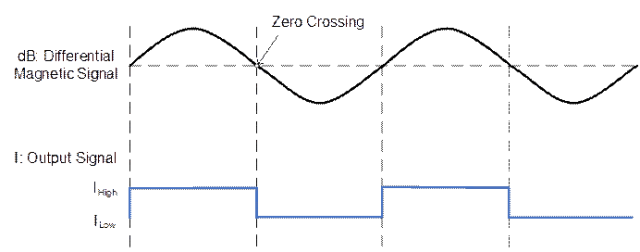
图1标准协议输出
对于只需要速度信息、不需要方向信息的应用来说,标准的速度协议非常适合选用,在允许的气隙范围内,方波信号的输出都是很稳定的,CH503(C)的占空比波动小、延时较小,在高速的轮速下输出参数依然稳定有效。但是这种协议的缺点就是无法输出其他信息,例如方向以及气隙警告等。
3. PWM协议
PWM协议的电流与标准协议类似,电路中的开和关状态由高和低电流来表示。磁输入信号的每一次过零都会触发一个输出脉冲,通常每个轮齿旋转的周期会产生固定脉冲数,速度信息就可以根据输出脉冲率提供,输出信号的连续上升沿之间的间隔时间就是脉冲率。除了速度信号以外,还会通过PWM调制的方式改变输出脉冲的宽度,从而提供更多的信息。
关于方向的定义,如图2所示,CH504(C)芯片带丝印的面朝向目标齿轮,齿轮从芯片GND引脚侧往VDD侧转时,输出脉冲传递的是DR-R的方向信息;而当目标齿轮从VDD侧往GND侧转时,输出脉冲传递的是DR-L的信息。两个方向信息以不同的脉冲宽度体现,可以帮助控制单元了解此时齿轮转动的方向。同样,如果气隙超出临界值的时候,脉冲宽度变化也会给出警告信息。具体的脉宽调制的宽度取决于传感器芯片的编程。PWM协议的输出波形如图3所示。
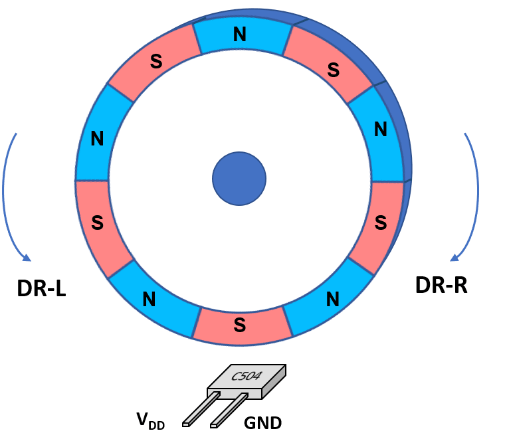
图2方向的定义
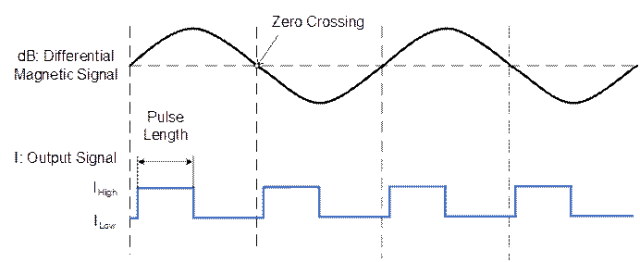
图3PWM协议输出
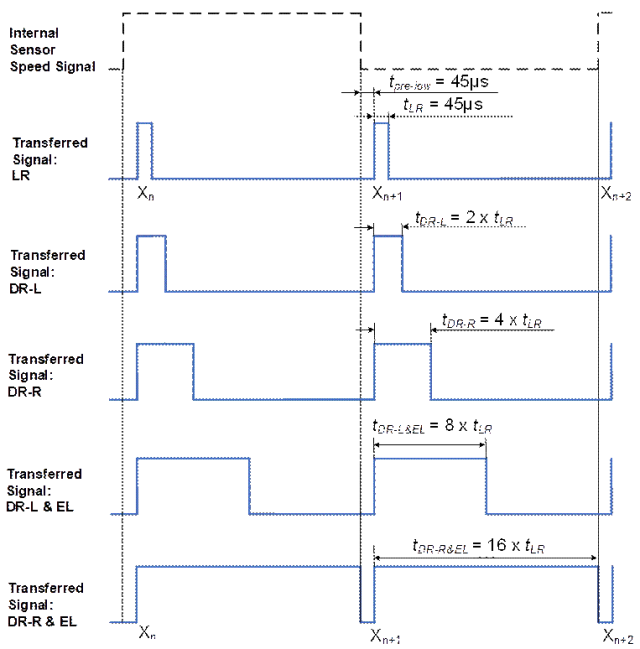
图4 PWM协议不同脉宽传递的信息
相较于标准协议,PWM协议不仅仅是提供速度信息,还有方向和气隙警告等信息。车轮的正反转判断信息大大提高了轮速传感器在智能方面的应用。
4. AK协议
AK协议包含一个IHIGH 的速度脉冲和后续的九位数据信息位,速度脉冲是提供齿轮的速度信息,后续的数据信息位提供更多的其他信息,例如方向以及气隙信息等。这些数据信息位是曼彻斯特编码,一帧数据内,数据段的波形,若检测到电流上升沿则表示数据1,电流下降沿表示数据0。
编码1和0由IMID和ILOW组成,可以看出AK协议的速度信号由三种电流构成。数据信息位的0和1代表了各自不同的信息,每一位数据信息位也有各自的信息,例如方向或者是气隙警告。CH505(C)的输出波形由图3所示,AK协议数据信息如表2所示。
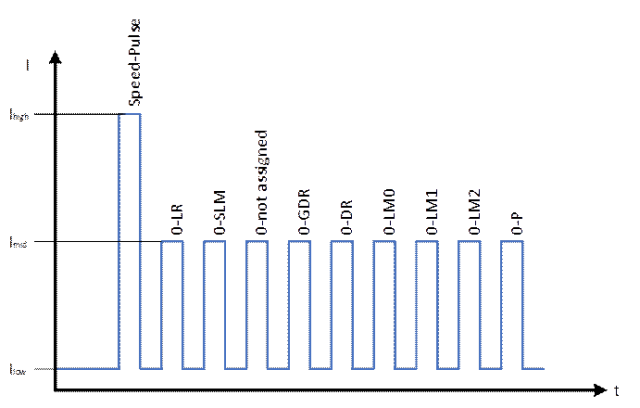
图5 AK协议输出波形
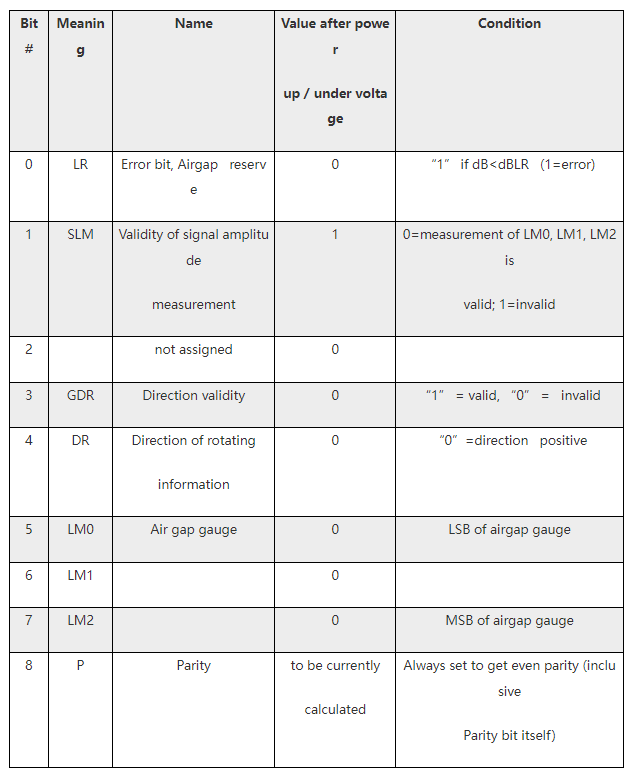
表2 CH505(C)的数据信息位含义
可以看出数据中包含了气隙有效性、方向有效性与正反转信息,这些单个数据可以在电控单元上被解码,从而获得具体状态的信息。即便是静止的状态下(Standstill mode),速度脉冲消失,但是后面的数据位依然能输出,对于需要智能轮速传感器的应用十分重要。然而AK协议中由于传输消息的时间会很长,高速状态下改为只输出其中几位数据位,所以目标轮转动的最大速度可能会受到一定的限制。
5. 结论
本文就常见的几种轮速传感器的协议做了一些介绍,分析了它们的特点以及优劣势。不难看出,在不同的应用场景下,选择一个更合适的输出形式非常重要,协议的选择是高度依赖于应用程序的需求的。可以根据需求从CH50X系列中挑选标准协议、PWM协议、及AK协议三种输出形式的轮速传感器。
审核编辑:刘清