Xc1004四轴SPI运动控制芯片
参
考
手
册
概述
SPI通讯,仅需使用10条指令便可完成复杂工作。
单芯片四轴输出,多个芯片通过不同片选脚可控制达120轴。
独立轴e版本支持最大脉冲输出频率1.2MHz独立输出。
插补轴f版本支持四轴,三轴,二轴,一轴直线插补,二轴圆弧插补,螺旋插补,支持连续插补,支持速度前瞻。
脉冲输出使用脉冲+方向方式。
各版本拥有128条运动指令缓存空间。
LQFP48封装,引脚输入输出3.3V,可兼容5V。
性能参数
|
温度范围 |
-40 ~ +105℃ |
|
封装 |
LQFP48 |
|
IO输入 |
3.3v ,兼容5v |
|
IO输出 |
3.3v TTL输出 |
|
控制轴数 |
4轴 |
|
脉冲频率 |
e版:1.2MHZ f版:400kHZ |
|
运动性能 |
e版:单轴运行,指令缓存 f版:1-4轴直线插补 ,圆弧插补,螺旋插补,支持指令缓存,支持连续插补 |
|
通信速度 |
SPI:10Mbps |
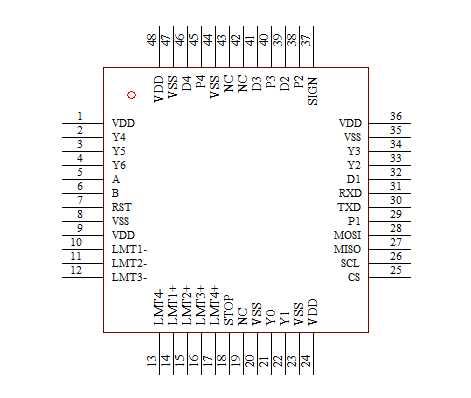
引脚排列
|
引脚号 |
引脚名称 |
引脚功能说明 |
|
1 |
VDD |
电源正极+3.3V |
|
2 |
Y4 |
4号输出口 |
|
3 |
Y5 |
5号输出口 |
|
4 |
Y6 |
6号输出口 |
|
5 |
A |
空引脚 |
|
6 |
B |
空引脚 |
|
7 |
RST |
复位引脚,低电平有效 |
|
8 |
VSS |
电源负极 |
|
9 |
VDD |
电源正极+3.3V |
|
10 |
LMT1- |
1轴负限位或原点,低电平有效 |
|
11 |
LMT2- |
2轴负限位或原点,低电平有效 |
|
12 |
LMT3- |
3轴负限位或原点,低电平有效 |
|
13 |
LMT4- |
4轴负限位或原点,低电平有效 |
|
14 |
LMT1+ |
1轴正限位,低电平有效 |
|
15 |
LMT2+ |
2轴正限位,低电平有效 |
|
16 |
LMT3+ |
3轴正限位,低电平有效 |
|
17 |
LMT4+ |
4轴正限位,低电平有效 |
|
18 |
STOP |
急停引脚,低电平有效 |
|
19 |
NC |
空引脚 |
|
20 |
VSS |
电源负极 |
|
21 |
Y0 |
0号输出口 |
|
22 |
Y1 |
1号输出口 |
|
23 |
VSS |
电源负极 |
|
24 |
VDD |
电源正极+3.3V |
|
25 |
CS |
SPI通信使能脚,低电平有效 |
|
26 |
SCK |
SPI通信时钟脚 |
|
27 |
SO |
SPI通信数据输出脚,接单片机数据输入脚 |
|
28 |
SI |
SPI通信数据输入脚,接单片机数据输出脚 |
|
29 |
P1 |
第1轴脉冲信号 |
|
30 |
TXD |
串口数据发送 |
|
31 |
RXD |
串口数据接收 |
|
32 |
D1 |
第1轴方向信号 |
|
33 |
Y2 |
2号输出口 |
|
34 |
Y3 |
3号输出口 |
|
35 |
VSS |
电源负极 |
|
36 |
VDD |
电源正极+3.3V |
|
37 |
SIGN |
工作状态指示,闲时慢速交替变化,轴运行时快速交替变化 |
|
38 |
P2 |
第2轴脉冲信号 |
|
39 |
D2 |
第2轴方向信号 |
|
40 |
P3 |
第3轴脉冲信号 |
|
41 |
D3 |
第3轴方向信号 |
|
42 |
NC |
空引脚 |
|
43 |
NC |
空引脚 |
|
44 |
VSS |
电源负极 |
|
45 |
P4 |
第4轴脉冲信号 |
|
46 |
D4 |
第4轴方向信号 |
|
47 |
VSS |
电源负极 |
|
48 |
VDD |
电源正极+3.3V |
SPI通讯协议
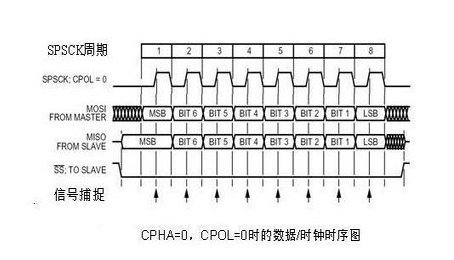
芯片与单片机使用SPI通讯,单片机作为主机,芯片为从机。CPHA=0,CPOL=0,高位在前,SPI数据宽度为8位。空闲状态下单片机SCK引脚必须为低电平。每一条指令开始发送前将CS引脚置低,整条指令发送完成后必须将CS置高。
每条指令间隔1MS以上。
SPI时序图如下:
SPI通讯指令
◆设置轴速度(e版本f版本共用指令)
发送:
|
功能码 |
补充0 |
轴号 |
加速度 |
运行速度 |
|
0x01 |
0x00 |
1字节 |
4字节 |
4字节 |
部分参数解释:
轴号(1,2,3,4)
加减速 加减速为: e版(1-480000)(Hz/s2) f版(1-1600000)(Hz/s2)
运行速度 运行频率为:e版(1-1200000)(Hz) f版(1-400000)(Hz)
要点:e版本轴号有效,速度为对应轴的速度。f版本由于共用一个插补核心,轴号设为任意值都为所有轴速度,如需改变当前运动指令里的速度需在当前指令前重设速度。加速度最大可设为运行速度4倍。
◆ 设置轴逻辑位置(e版本f版本共用指令)
发送:
|
功能码 |
补充0 |
轴号 |
位置 |
|
0x12 |
0x00 |
1字节 |
4字节 |
部分参数解释:
轴号(1,2,3,4) 1-4:1-4轴
位置 轴逻辑位置,范围(-268435455~+268435455)
◆轴停止(e版本f版本共用指令)
发送:
|
功能码 |
轴号 |
模式 |
|
0x17 |
1字节 |
1字节 |
部分参数解释:
轴号(1,2,3,4) 1-4: 1-4轴
模式(0,1,2) 0:急停并清空后面缓存的指令 1:减速停不清空后面缓存的指令 2:急停不清空后面缓存的指令
要点:f版本由于共用一个插补核心,轴号设为任意值都会让所用轴停止。
◆获取各轴逻辑位置和状态(e版本f版本共用指令)
发送:
|
功能码 |
数据0 |
|
0x04 |
最多19个字节 |
返回:
|
起始码 |
各轴运行状态 |
缓存数量 |
1轴坐标 |
2轴坐标 |
3轴坐标 |
4轴坐标 |
|
0x00 |
1字节 |
2字节 |
4字节 |
4字节 |
4字节 |
4字节 |
部分参数解释:
各轴运行状态(转为8位二进制数)
第0位为e版1轴状态 0:停止中 1:运行中
第1位为e版2轴状态 0:停止中 1:运行中
第2位为e版3轴状态 0:停止中 1:运行中
第3位为e版4轴状态 0:停止中 1:运行中
第5位为f版插补核各轴状态 0:停止中 1:运行中
缓存数量(0-128) 还未运行的缓存指令数
各轴坐标 范围(-268435455~+268435455)
要点:返回字节按功能顺序排列,由于SPI工作模式是一边发送一边接收,如只需取前面字节的数据,为节省通讯时间,可只发送对应字节的数据0。例如只需获取各轴运行状态,发送2个字节0便可。轴运行状态只是轴的瞬时状态,不能用来指示圆弧指令是否完成。可通过读取缓存数量来判断缓存区指令是否完成。一条圆弧指令会动态占用最多120条缓存空间。
◆ 设置特殊功能(f版本专用指令)
发送:
|
功能码 |
补充0 |
功能 |
|
0xfa |
0x00 |
1字节 |
部分参数解释:
当功能写入0xfc,缓存内运动指令暂停。
当功能写入0xfd,取消缓存内运动指令暂停。
以下指令会自动进入缓存区并排队执行:
◆ 回原点(e版本f版本共用指令)
发送:
|
功能码 |
补充0 |
轴号 |
进入原点速度 |
离开原点速度 |
|
0x1a |
0x00 |
1字节 |
4字节 |
4字节 |
部分参数解释:
轴号(1,2,3,4)
进入原点速度 运行频率为:值(1-400000)(Hz)
离开原点速度 运行频率为:值(1-400000)(Hz)
要点:回原点指令会自动生成一段负脉冲和一段正脉冲。以进入原点速度输出负脉冲时,左限位原点开关生效时自动减速停;随后以离开原点速度输出正脉冲,离开原点限位开关时自动急速停止,急停后可作为原点。回原点指令不宜和其它运动指令混合在一起放入缓存里,回原点过程应单独存在。
◆ 四轴直线插补(f版本专用指令)
发送:
|
功能码 |
X轴号 |
Y轴号 |
Z轴号 |
E轴号 |
X脉冲数 |
Y脉冲数 |
Z脉冲数 |
E脉冲数 |
补充0 |
运动方式 |
|
0x0a |
1字节 |
1字节 |
1字节 |
1字节 |
4字节 |
4字节 |
4字节 |
4字节 |
0x00 |
1字节 |
部分参数解释:
X轴号(1,2,3,4)
Y轴号(1,2,3,4)
Z轴号(1,2,3,4)
E轴号(1,2,3,4)
X脉冲(-268435455~+268435455)
Y脉冲(-268435455~+268435455)
Z脉冲(-268435455~+268435455)
E脉冲(-268435455~+268435455)
运动方式(0,1) 0:绝对位移 1:相对位移
要点:当只需要少于四轴做插补时,不用的轴号和脉冲数写0。
◆ 二轴圆弧插补(f版本专用指令)
发送:
|
功能码 |
X轴号 |
Y轴号 |
终点坐标X |
终点坐标Y |
圆心坐标X |
圆心坐标Y |
运动方式1 |
运动方式2 |
|
0x0c |
1字节 |
1字节 |
4字节 |
4字节 |
4字节 |
4字节 |
1字节 |
1字节 |
部分参数解释:
X轴号(1,2,3)
Y轴号(1,2,3)
终点坐标 圆弧插补的终点位置,范围(-268435455~+268435455)
圆心坐标 圆弧插补的圆心点位置,范围(-268435455~+268435455)
运动方式1 0:逆时针插补 1:顺时针插补 2:三点定圆弧
运动方式2 0:绝对位移 1:相对位移
要点:圆弧各坐标必须能构成正常的圆弧。圆弧插补指令会根据圆弧参数动态占用缓存空间。当运动方式1设为2时,为三点定圆弧模式,圆心坐标参数设为圆弧的中间点坐标。
◆ 三轴螺旋插补(f版本专用指令)
发送:
|
功能码 |
X轴号 |
Y轴号 |
Z轴号 |
终点坐标X |
终点坐标Y |
脉冲数 |
圆心坐标X |
圆心坐标Y |
运动方式1 |
运动方式2 |
|
0x0d |
1字节 |
1字节 |
1字节 |
4字节 |
4字节 |
字节 |
4字节 |
4字节 |
1字节 |
1字节 |
部分参数解释:
X轴号 (1,2,3) 圆弧X轴
Y轴号 (1,2,3) 圆弧Y轴
Z轴号 (1,2,3) 螺旋轴
终点坐标 圆弧插补的终点位置,范围(-268435455~+268435455)
圆心坐标 圆弧插补的圆心点位置,范围(-268435455~+268435455)
运动方式1 0:逆时针插补 1:顺时针插补
运动方式2 0:绝对位移 1:相对位移
◆ 等待延时(e版本f版本共用指令)
发送:
|
功能码 |
延时量 |
|
0x0e |
2字节 |
部分参数解释:
延时量(1-10000)MS
要点:等待延时是指等待所设延时量后才执行后面的指令。
◆写输出口状态(e版本f版本共用指令)
发送:
|
功能码 |
输出端口号 |
输出状态 |
|
0x03 |
1字节 |
1字节 |
部分参数解释:
输出端口号 (0-6) Y0-Y6
输出状态 (0,1) 0:输出低电平 1:输出高电平
◆ 单轴运行(e版本专用指令)
发送:
|
功能码 |
轴号 |
运动方式 |
脉冲数量 |
|
0x02 |
1字节 |
1字节 |
4字节 |
部分参数解释:
轴号(1,2,3,4) 独立轴运动的轴号
脉冲数量 (-268435455~+268435455)输出的脉冲数 >0:正方向移动 <0:负方向移动
运动方式(0,1) 0:绝对位移 1:相对位移
◆等待轴停止(e版本专用指令)
发送:
|
功能码 |
轴号 |
|
0x0f |
1字节 |
部分参数解释:
轴号(1,2,3,4) 1,2,3,4:独立轴1-4轴
要点:等待轴停止是指在对应轴停止之前一直等待,直到轴停止后才执行后面的指令。独立轴不会自动等待轴运行完成后才执行下一条指令。插补轴会自动等待轴运行完成后才执行下一条指令。
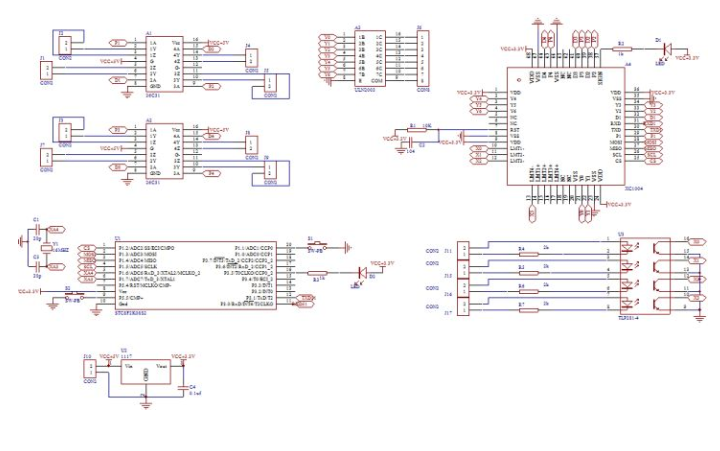
电路连接
芯片引脚输出最大电流15Ma,输入灌电流最大25Ma。如多芯片组网,各芯片的SCK,SO,SI引脚并联,CS脚独立受单片机控制。单片机SPI数据输入脚接芯片SO脚,需内部或外部上拉。单片机SPI数据输出脚接芯片SI脚。芯片,单片机,差分输出连接参考图:
运动控制编程参考
通过51单片机控制运动控制芯片的SPI通信程序示例。
(来自产品官网:http://www.lf-control.com)
#include
#include
//MCU: stc8f2k08s2
sfr P0M1 = 0x93;
sfr P0M0 = 0x94;
sfr P1M1 = 0x91;
sfr P1M0 = 0x92;
sfr P2M1 = 0x95;
sfr P2M0 = 0x96;
sfr P3M1 = 0xb1;
sfr P3M0 = 0xb2;
sfr P4M1 = 0xb3;
sfr P4M0 = 0xb4;
sfr P5M1 = 0xC9;
sfr P5M0 = 0xCA;
sfr P6M1 = 0xCB;
sfr P6M0 = 0xCC;
sfr P7M1 = 0xE1;
sfr P7M0 = 0xE2;
sfr P5 = 0xC8;
sfr SPSTAT = 0xcd;
sfr SPCTL = 0xce;
sfr SPDAT = 0xcf;
sfr IE2 = 0xaf;
sfr AUXR = 0x8e;
sfr T2H = 0xd6;
sfr T2L = 0xd7;
sfr P_SW2 = 0xba;
#define CKSEL (*(unsigned char volatile xdata *)0xfe00)
#define CKDIV (*(unsigned char volatile xdata *)0xfe01)
#define IRC24MCR (*(unsigned char volatile xdata *)0xfe02)
#define XOSCCR (*(unsigned char volatile xdata *)0xfe03)
#define IRC32KCR (*(unsigned char volatile xdata *)0xfe04)
//#define FOSC 16000000UL //使用外部16M晶振
#define FOSC 24000000UL //使用内部24M晶振
#define BRT (65536 - FOSC / 115200 / 4) //定义115200波特率
sbit b2 = P1^1;
sbit b1 = P5^5;
sbit led = P3^5;
sbit cs3 = P3^3;
sbit cs2 = P3^2;
sbit cs1 = P1^2;
sbit sck = P1^5;
sbit in = P1^4;
sbit out = P1^3;
#define SPI3_CSHIGH cs3=1 // CS3
#define SPI3_CSLOW cs3=0
#define SPI2_CSHIGH cs2=1 // CS2
#define SPI2_CSLOW cs2=0
#define SPI1_CSHIGH cs1=1 // CS1
#define SPI1_CSLOW cs1=0
#define SPI_SCKHIGH sck=1 //SCK
#define SPI_SCKLOW sck=0
#define SPI_OUTHIGH out=1
#define SPI_OUTLOW out=0//MOSI
#define SPI_IN in//MISO
unsigned char inbuf[50];
unsigned char b1_state=0;
void initial()
{
P1M1 = 0;
P1M0 = 0x2c; // 引脚模拟通信时,MOSI,SCK, CS 设为推挽输出
SPI1_CSHIGH; //CS不使用时设为高
SPI2_CSHIGH;
SPI3_CSHIGH;
SPI_SCKLOW;//SCK空闲状态一定要为低电平。
//SPCTL = 0xd0; //使能SPI主机模式
//SPSTAT = 0xc0; //清中断标志
}
void init_uart()
{
SCON = 0x50;
T2L = BRT;
T2H = BRT >> 8;
AUXR = 0x15;
}
/*
串口发送一个字节。
*/
void USART_Txbyte(unsigned char i)
{
SBUF = i;
while(TI ==0);
TI = 0;
}
/*
串口发送一串数据。
*/
void USRAT_transmit(unsigned char *fdata,unsigned char len)
{
unsigned char i;
for(i=0;i
{
USART_Txbyte(fdata[i]);
}
}
void delay_nus(unsigned long n)
{
unsigned long j;
while(n--)
{
j=1;
while(j--);
}
}
//延时n ms
void delay_nms(unsigned long n)
{
while(n--)
delay_nus(1000);
}
/*
函数名: SPI_SendData
功能:软件模拟SPI通讯发送并接收一个8位字节数据。
如需使用硬件SPI,单片机作为主机,运动控制芯片为从机。CPHA=0,CPOL=0,高位在前,SPI数据宽度为8位。
空闲状态下单片机SCK引脚必须为低电平。每一条指令开始发送前将CS引脚置低,整条指令发送完成后必须将CS置高。
每条指令间需有时间间隔,推荐延时1MS以上。
*/
unsigned char SPI_SendData(unsigned char outdata)
{
unsigned char RecevieData=0,i;
SPI_SCKLOW;
// _nop_(); _nop_(); _nop_();_nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
for(i=0;i<8;i++)
{
SPI_SCKLOW;
_nop_(); _nop_(); _nop_();_nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
if(outdata&0x80)
{
SPI_OUTHIGH;
}
else
{
SPI_OUTLOW;
}
outdata<<=1;
_nop_(); _nop_(); _nop_();_nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
SPI_SCKHIGH; //
RecevieData <<= 1;
if(SPI_IN)
{
RecevieData |= 1;
}
_nop_(); _nop_(); _nop_();_nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
SPI_SCKLOW;
}
return RecevieData;
}
/*
unsigned char SPI_SendData(unsigned char outdata)
{
unsigned char RecevieData=0,i;
SPDAT = outdata; //发送数据
while (!(SPSTAT & 0x80)); //查询完成标志
SPSTAT = 0xc0; //清中断标志
return SPDAT;
}
*/
/*
函数名: enabled_cs
功能:SPI运动控制模块使能对应芯片模块的CS脚
参数:
cardno 卡号
用单片机不同引脚去控制不同芯片的CS脚,以便多个芯片模块关联使用。
*/
void enabled_cs(unsigned char cardno)
{
if(cardno==1)
{
SPI1_CSLOW;
}
if(cardno==2)
{
SPI2_CSLOW;
}
if(cardno==3)
{
SPI3_CSLOW;
}
}
/*
函数名: disabled_cs
功能:SPI运动控制模块禁止对应芯片模块的CS脚
参数:
cardno 卡号
用单片机不同引脚去控制不同芯片的CS脚,以便多个芯片关联使用。
*/
void disabled_cs(unsigned char cardno)
{
if(cardno==1)
{
SPI1_CSHIGH;
}
if(cardno==2)
{
SPI2_CSHIGH;
}
if(cardno==3)
{
SPI3_CSHIGH;
}
}
/*
函数名: set_speed
功能:设置轴速度
参数:
cardno 卡号
axis 轴号(1,2,3,4)
acc 加减速: 值(Hz/s2)
speed 运行频率为:值(Hz)
*/
void set_speed(unsigned char cardno ,unsigned char axis ,unsigned long acc ,unsigned long speed )
{
unsigned char OutByte[25];
OutByte[0] = 1;
OutByte[1] = 0;
OutByte[2] = axis;
OutByte[3] = acc >>24;
OutByte[4] = acc >>16;
OutByte[5] = acc >>8;
OutByte[6] = acc ;
OutByte[7] = speed >>24;
OutByte[8] = speed >>16;
OutByte[9] = speed >>8;
OutByte[10] = speed ;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
SPI_SendData(OutByte[7]);
SPI_SendData(OutByte[8]);
SPI_SendData(OutByte[9]);
SPI_SendData(OutByte[10]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: set_command_pos
功能: 设置轴逻辑位置
参数:
cardno 卡号
axis 轴号(1,2,3,4)
pulse 位置脉冲数,范围(-268435455~+268435455)
*/
void set_command_pos(unsigned char cardno ,unsigned char axis, long value )
{
unsigned char OutByte[25];
OutByte[0] = 0x12 ;
OutByte[1] = 0 ;
OutByte[2] = axis ;
OutByte[3] = value >>24;
OutByte[4] = value >>16;
OutByte[5] = value >>8;
OutByte[6] = value ;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: sudden_stop
功能: 轴立即停止
参数:
cardno 卡号
axis 停止的轴号(1,2,3,4)
mode 0:急停并清空后面缓存的指令 2:急停不清后面缓存的指令
*/
void sudden_stop(unsigned char cardno ,unsigned char axis ,unsigned char mode)
{
unsigned char OutByte[25];
OutByte[0] = 0x17 ;
OutByte[1] = axis ;
OutByte[2] = mode;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: set_special
功能:设置特别功能
参数:
cardno 卡号
value
0xfc 缓存插补运动暂停
0xfd 取消缓存插补暂停
*/
void set_special(unsigned char cardno,unsigned char value)
{
unsigned char OutByte[25];
OutByte[0] = 0xFA ;
OutByte[1] = 0;
OutByte[2] = value;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: get_inp_state
功能: 获取轴状态,缓存剩余量,各轴逻辑位置。
参数:
cardno 卡号
amount 获取字节数量。 设为20将取全部数据。
inbuf[] 读取的数据存放的数组
*/
void get_inp_state( unsigned char cardno, unsigned char amount,unsigned char inbuf[])
{
unsigned char OutByte[25];
char i;
enabled_cs(cardno);
inbuf[0]=SPI_SendData(0x04);
for(i=1;i
{
inbuf[i]=SPI_SendData(0);
}
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: go_home
功能:回原点,回到原点开关会自动减速停止,随后离开原点开关自动急停
参数:
cardno 卡号
no 轴号
speed1 进入原点速度,运行频率为:值(Hz)
speed2 离开原点速度,运行频率为:值(Hz)
*/
void go_home(unsigned char cardno,unsigned char no , long speed1 ,long speed2 )
{
unsigned char OutByte[25];
OutByte[0] = 0x1a;
OutByte[1] = 0;
OutByte[2] = no;
OutByte[3] = speed1>>24;
OutByte[4] = speed1 >>16;
OutByte[5] = speed1>> 8;
OutByte[6] = speed1;
OutByte[7] = speed2 >>24;
OutByte[8] = speed2 >>16;
OutByte[9] = speed2 >>8;
OutByte[10] = speed2 ;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
SPI_SendData(OutByte[7]);
SPI_SendData(OutByte[8]);
SPI_SendData(OutByte[9]);
SPI_SendData(OutByte[10]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: inp_move4
功能:四轴直线插补
参数:
cardno 卡号
no1 X轴轴号
no2 Y轴轴号
no3 Z轴轴号
no4 E轴轴号
pulse1,pulse2,pulse3,pulse4 X-Y-Z-E轴移动的距离,范围(-8388608~+8388607)
mode 0:绝对位移 1:相对位移
*/
void inp_move4(unsigned char cardno,unsigned char no1 ,unsigned char no2 ,unsigned char no3 ,unsigned char no4, long pulse1 ,long pulse2 ,long pulse3 ,long pulse4 ,unsigned char mode )
{
unsigned char OutByte[25];
OutByte[0] = 0xa;
OutByte[1] = no1;
OutByte[2] = no2;
OutByte[3] = no3;
OutByte[4] = no4;
OutByte[5] = pulse1>>24;
OutByte[6] = pulse1 >>16;
OutByte[7] = pulse1>> 8;
OutByte[8] = pulse1;
OutByte[9] = pulse2 >>24;
OutByte[10] = pulse2 >>16;
OutByte[11] = pulse2 >>8;
OutByte[12] = pulse2 ;
OutByte[13] = pulse3 >>24;
OutByte[14] = pulse3 >>16;
OutByte[15] = pulse3 >>8;
OutByte[16] = pulse3 ;
OutByte[17] = pulse4 >>24;
OutByte[18] = pulse4 >>16;
OutByte[19] = pulse4 >>8;
OutByte[20] = pulse4 ;
OutByte[21] = 0 ;
OutByte[22] = mode;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
SPI_SendData(OutByte[7]);
SPI_SendData(OutByte[8]);
SPI_SendData(OutByte[9]);
SPI_SendData(OutByte[10]);
SPI_SendData(OutByte[11]);
SPI_SendData(OutByte[12]);
SPI_SendData(OutByte[13]);
SPI_SendData(OutByte[14]);
SPI_SendData(OutByte[15]);
SPI_SendData(OutByte[16]);
SPI_SendData(OutByte[17]);
SPI_SendData(OutByte[18]);
SPI_SendData(OutByte[19]);
SPI_SendData(OutByte[20]);
SPI_SendData(OutByte[21]);
SPI_SendData(OutByte[22]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: inp_arc
功能:二轴圆弧插补
参数:
cardno 卡号
no1 参与插补X轴的轴号
no2 参与插补Y轴的轴号
x,y 圆弧插补的终点位置(相对于起点),范围(-8388608~+8388607)
i,j 圆弧插补的圆心点位置(相对于起点),范围(-8388608~+8388607)
mode1 0:逆时针插补 1:顺时针插补
mode2 0:绝对位移 1:相对位移
*/
void inp_arc(unsigned char cardno ,unsigned char no1,unsigned char no2, long x , long y, long i, long j,unsigned char mode1,unsigned char mode2 )
{
unsigned char OutByte[25];
OutByte[0] = 0xc;
OutByte[1] = no1;
OutByte[2] = no2;
OutByte[3] = x >>24;
OutByte[4] = x >>16;
OutByte[5] = x >>8;
OutByte[6] = x ;
OutByte[7] = y >>24;
OutByte[8] = y >>16;
OutByte[9] = y >>8;
OutByte[10] = y ;
OutByte[11] = i >>24;
OutByte[12] = i >>16;
OutByte[13] = i >>8;
OutByte[14] = i ;
OutByte[15] = j >>24;
OutByte[16] = j >>16;
OutByte[17] = j >>8;
OutByte[18] = j ;
OutByte[19] = mode1;
OutByte[20] = mode2;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
SPI_SendData(OutByte[7]);
SPI_SendData(OutByte[8]);
SPI_SendData(OutByte[9]);
SPI_SendData(OutByte[10]);
SPI_SendData(OutByte[11]);
SPI_SendData(OutByte[12]);
SPI_SendData(OutByte[13]);
SPI_SendData(OutByte[14]);
SPI_SendData(OutByte[15]);
SPI_SendData(OutByte[16]);
SPI_SendData(OutByte[17]);
SPI_SendData(OutByte[18]);
SPI_SendData(OutByte[19]);
SPI_SendData(OutByte[20]);
disabled_cs(cardno);
delay_nms(100);
}
/*
函数名: inp_helical
功能:圆弧螺旋插补
参数:
cardno 卡号
no1 参与插补X轴的轴号
no2 参与插补Y轴的轴号
no3 参与插补螺旋轴的轴号
x,y 圆弧插补的终点位置(相对于起点),范围(-8388608~+8388607)
z 参与插补螺旋轴的位置(相对于起点)
i,j 圆弧插补的圆心点位置(相对于起点),范围(-8388608~+8388607)
mode1 0:逆时针插补 1:顺时针插补
mode2 0:绝对位移 1:相对位移
*/
void inp_helical(unsigned char cardno ,unsigned char no1,unsigned char no2,unsigned char no3,long x , long y,long z, long i, long j,unsigned char mode1,unsigned char mode2 )
{
unsigned char OutByte[30];
OutByte[0] = 0xd;
OutByte[1] = no1;
OutByte[2] = no2;
OutByte[3] = no3;
OutByte[4] = x >>24;
OutByte[5] = x >>16;
OutByte[6] = x >>8;
OutByte[7] = x ;
OutByte[8] = y >>24;
OutByte[9] = y >>16;
OutByte[10] = y >>8;
OutByte[11] = y ;
OutByte[12] = z >>24;
OutByte[13] = z >>16;
OutByte[14] = z >>8;
OutByte[15] = z ;
OutByte[16] = i >>24;
OutByte[17] = i >>16;
OutByte[18] = i >>8;
OutByte[19] = i ;
OutByte[20] = j >>24;
OutByte[21] = j >>16;
OutByte[22] = j >>8;
OutByte[23] = j ;
OutByte[24] = mode1;
OutByte[25] = mode2;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
SPI_SendData(OutByte[7]);
SPI_SendData(OutByte[8]);
SPI_SendData(OutByte[9]);
SPI_SendData(OutByte[10]);
SPI_SendData(OutByte[11]);
SPI_SendData(OutByte[12]);
SPI_SendData(OutByte[13]);
SPI_SendData(OutByte[14]);
SPI_SendData(OutByte[15]);
SPI_SendData(OutByte[16]);
SPI_SendData(OutByte[17]);
SPI_SendData(OutByte[18]);
SPI_SendData(OutByte[19]);
SPI_SendData(OutByte[20]);
SPI_SendData(OutByte[21]);
SPI_SendData(OutByte[22]);
SPI_SendData(OutByte[23]);
SPI_SendData(OutByte[24]);
SPI_SendData(OutByte[25]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: write_bit
功能:写输出口状态
参数:
cardno 卡号
number 端口号(0-6) Y0-Y6
value 状态(0,1) 0 输出低电平 1 输出高电平
*/
void write_bit(unsigned char cardno , unsigned char number, unsigned char value)
{
unsigned char OutByte[25];
OutByte[0] = 0x03 ;
OutByte[1] = number;
OutByte[2] = value;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: wait_delay
功能:等待延时数
参数:
cardno 卡号
value 延时量(1-10000)MS
*/
void wait_delay(unsigned char cardno ,unsigned int value)
{
unsigned char OutByte[25];
OutByte[0] = 0x0e ;
OutByte[1] = value>>8;
OutByte[2] = value;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: pmove
功能: e版本单轴运行
参数:
cardno 卡号
axis 轴号
mode 0:绝对位移 1:相对位移
pulse1 X轴移动的距离,范围(-8388608~+8388607)
*/
void pmove(unsigned char cardno,unsigned char axis,unsigned char mode, long pulse1 )
{
unsigned char OutByte[25];
OutByte[0] = 0x2;
OutByte[1] = axis ;
OutByte[2] = mode;
OutByte[3] = pulse1>>24;
OutByte[4] = pulse1 >>16;
OutByte[5] = pulse1>>8;
OutByte[6] = pulse1;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
SPI_SendData(OutByte[2]);
SPI_SendData(OutByte[3]);
SPI_SendData(OutByte[4]);
SPI_SendData(OutByte[5]);
SPI_SendData(OutByte[6]);
disabled_cs(cardno);
delay_nms(1);
}
/*
函数名: wait_stop
功能: e版本等待轴停止
参数:
cardno 卡号
axis 停止的轴号(1,2,3,4)
mode 0:急停并清空后面缓存的指令 2:急停不清后面缓存的指令
*/
void wait_stop(unsigned char cardno ,unsigned char axis)
{
unsigned char OutByte[25];
OutByte[0] = 0xf ;
OutByte[1] = axis ;
enabled_cs(cardno);
SPI_SendData(OutByte[0]);
SPI_SendData(OutByte[1]);
disabled_cs(cardno);
delay_nms(1);
}
void main(void)
{
initial();
init_uart();
// ES = 1;
// EA = 1;
// P_SW2 = 0x80;
// XOSCCR = 0xc0; //启动外部晶振
// while (!(XOSCCR & 1)); //等待时钟稳定
// CKDIV = 0x00; //时钟不分频
// CKSEL = 0x01; //选择外部晶振
// P_SW2 = 0x00;
led=0;
delay_nms(100) ;
/*下面的指令为1,2轴回原点
go_home(1,1,30000,5000 ) ; // 1轴回原点
go_home(1,2,30000,5000 ) ; // 2轴回原点
do
{
get_inp_state( 1, 4,inbuf); //只需读出4个字节来判断轴状态
}
while(inbuf[3]); // 等待缓存数量为0 ,如果多条运动指令在缓存里 ,可以读取缓存数量来判断指令有没执行完成。
//while(inbuf[1]); // 等待轴停止 ,如果只有一条除圆弧外的运动指令,可以读取轴状态来判断有没执行完。
set_command_pos(1 ,1,0); //设1轴坐标
set_command_pos(1 ,2,0); //设2轴坐标
*/
while(1)
{
if(!b1) //按下按键
{
delay_nms(10);
if(!b1)
{
/*e型测试指令*/
// set_speed(1 ,1,200000,50000); //设置1轴运行速度50K,加速度200k
// set_speed(1 ,2,200000,50000); //设置1轴运行速度50K,加速度200k
// set_speed(1 ,3,40000,10000); //设置1轴运行速度10K,加速度40k
//write_bit(1 , 6, 0); // Y6输出低
// pmove(1,1,1, 1000); //1轴相对运行速1000个脉冲
// pmove(1,2,1, 1000); // 2轴相对运行速1000个脉冲
//wait_stop(1 ,1); //等待1轴停止
//wait_stop(1 ,2); //等待2轴停止
// wait_delay(1 ,500); // 延时500MS
// pmove(1,3,1, 1000); //3轴相对运行速1000个脉冲
//write_bit(1 , 6, 1); // Y6输出高
/*f型测试指令*/
// write_bit(1 , 6, 0);
// set_speed(1 ,1,200000,50000); //设置运行速度50K,加速度200h
// wait_delay(1 ,500); // 延时500MS
// write_bit(1 , 2, 0);
// inp_move4(1,1,0,0,0,80000 ,0,0 ,0 ,1); // 1,2轴插补
// set_speed(1,1 ,800000,25000); //设置运行速度25K,加速度800K
//inp_move4(1,1,2,0,0,20000 ,10000,0 ,0 ,1); // 1,2轴插补
// inp_arc(1 ,1,2, -20000, 20000, -20000, 0,0,1) ; // 1,2轴圆弧插补
//set_speed(1 ,1,800000,25000); //设置运行速度250K,加速度800K
// inp_arc(1 ,1,2, -20000, 20000, -20000, 0,0,1) ;
// wait_delay(1 ,500);
// write_bit(1 , 6, 1);
// wait_delay(1 ,500);
// write_bit(1 , 6, 0);
/*下面的指令会直接发到缓存区自动排队运行*/
// write_bit(1 , 6, 0); // Y6输出低
// set_speed(1 ,1,40000,25000);
// inp_move4(1,1,2,3,4,320000 ,32000,32000 ,32000 ,1); // 4轴直线插补
//wait_delay(1 ,2000); //模块内部指令间延时3S
//inp_move4(1,1,2,0,0,32000 ,32000,0 ,0 ,1); // 1,2轴直线插补
// wait_delay(1 ,2000);
// inp_move4(1,2,0,0,0,32000 ,0,0 ,0 ,1); // 2轴单独运行
//inp_arc(1 ,1,2, -20000, 20000, -20000, 0,0,1) ; // 2轴圆弧插补,终点相对起点坐标(-20000,20000),圆心相对起点坐标(-20000,0),逆时针方向,画出1/4圆弧。
// write_bit(1 , 6, 1); // Y6输出高 ,判断指令段有没执行完成也可以在指令段后面加一条端口输出指令,然后用单片机来读引脚来判断。
while(!b1);
}
}
if(!b2) //按下按键
{
delay_nms(10) ;
if(!b2)
{
sudden_stop(1,1,0); // f型立即停止所有插补轴 ,并清缓存 。 e型立即停止1轴 ,并清缓存 。
while(!b2);
}
}
get_inp_state( 1, 20,inbuf); //读出20个字节数据放入数组
// USRAT_transmit(inbuf,20); // 串口将数组数据发送出去查看
//// USART_Txbyte(inbuf[3]);
if(inbuf[3]==0) //inbuf[1]数据为0表示所有轴都停
led=1;
else
led=0; // 指示LED点亮
}
}