 电子发烧友App
电子发烧友App


尽管有非技术媒体鉴于特斯拉(Tesla)Model S电动车最近发生的致命事故而预言自动驾驶车辆的消亡,笔者还是想在这篇文章中介绍传感器电子组件以及更好、更精进的软件算法,而它们终究可望在接下来的十年内实现安全的全自动驾驶车辆。
Tesla已经一再表明Model S并非自动驾驶车辆,Tesla电动车驾驶人需要清楚地认知:「这种系统只是新技术,并且仍处于公开测试阶段。」
而BMW、Mobileye和英特尔(Intel)三家公司在7月份宣布合作开发自动驾驶车辆平台时,也强调「安全第一」的原则,因为驾驶人的安全最重要。
美国全国公共广播电台(NPR)记者Sonari Glinton在最近的一场广播节目讨论中也表示,Tesla Model S是具备自动驾驶「功能」,而这些功能只是提供辅助、并非要替代驾驶人。
Google的全自动驾驶测试车辆则是仰赖成本更高、更复杂,采用光达(LiDAR)技术的远程感测(remote sensing)系统。
Tesla执行长Elon Musk曾表示:「全自动驾驶车辆显然需要360度摄影机,可能还需要额外的前向(forward) 摄影机、运算硬件,以及电动马达和转向齿条(steering rack) …也就是说,我认为并不需要LiDAR,只要利用被动光学组件和一个前向雷达就能实现自动驾驶。」他正致力为消费性市场推出价格相对能被大众负担,且强调安全性的车辆。
Tesla的Autopilot自动驾驶系统仰赖:「摄影机、雷达、超音波传感器和数据的结合,以自动控制汽车在高速公路上的行驶、变换车道以及根据交通流量调整速度;」该系统采用以色列芯片设计业者Mobileye提供的自动剎车技术。
Tesla电动车采用的Mobileye Emergency自动剎车功能,是「专门为避免后方追撞所设计」,因此无法避开今年7月1日在美国发生之Model S致命事故中的侧面碰撞;如前面提及,这种技术还在继续进行开发。例如有相关文献描述了以视觉技术为基础的自动驾驶动态控制设计,并将重点放在紧急避障功能中的协调转向(coordinated steering)和剎车控制;另有相关文献介绍了一种创新方法,可以用来避免致命的意外事故。
Google已经在美国数个州进行自动驾驶车辆测试;Tesla则宣布在今后三年内推出完全自动驾驶车辆;共乘服务业者Uber则在美国匹兹堡(Pittsburgh)开设了一个测试场地,准备发展一个自动驾驶出租车队。
日本车厂丰田(Toyota)曾透露,其公路自动驾驶汽车安装了12个用以撷取数据的传感器,包括1个安装于后照镜背面的摄影机模块,5个使用无线电波撷取其他车辆速度的雷达传感器,以及6个用于检测汽车周围物体位置的雷射传感器。
还有美国加州已经颁布了在公共道路上测试、操控自动驾驶车辆的法律框架。
虽然我们尚未准备好迎接全自动驾驶车辆,但应该是在不远的未来——在那之前,我们的手还是得握好方向盘,眼睛也要随时盯着路况。
传感器是自动驾驶的眼睛和耳朵
若自动驾驶车辆拥有「耳朵」,能在警车、救护车或消防车驶近,能透过车载摄影机或LiDAR看到前先听到警笛声并确定其方向…怎么样?或者在驾驶人、LiDAR或摄影机的视力所及之前,就先听到重型机车接近的声音呢?
以下让我们来看看自动驾驶车辆使用的各种传感器技术──是以设计工程师对电子传感器的专业见解,探索这些传感器如何与内建先进处理器与软件算法的车辆「大脑」相连。
扮演自动驾驶车辆眼睛的技术
LiDAR 这是一种使用旋转激光束的系统,获得BMW及Google、日产(Nissan)和苹果(Apple)研发的实验用自动驾驶车辆采用,但若要在大众车款中应用这类系统,必须等待其成本大幅下降。
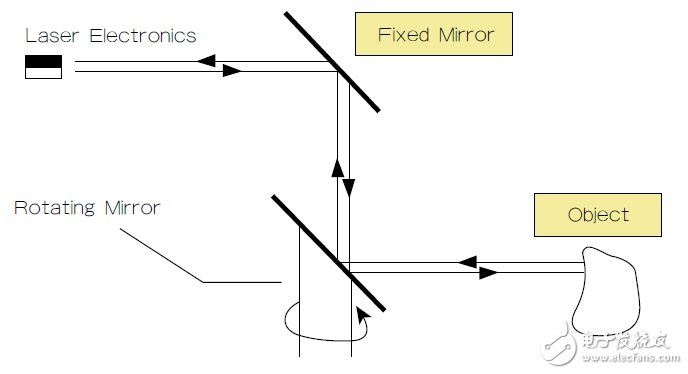
图 1 LiDAR基本原理:图为一对单发射器 /检测器搭配可活动旋转镜的 LiDAR设计;这种架构可以实现至少一个平面上的扫描;其中的镜子不仅可以反射二极管发出的光,还能将返回光线反射到检测器。透过在这种应用中配置旋转镜,可以实现 90~180度的典型方位视角,同时简化系统设计和可制造性,因为只有镜子是活动零件。 (图片来源: Velodyne)
美国业者Velodyne能提供一种高分辨率LiDAR(HDL)传感器,以因应自动驾驶车辆导航的严格要求;其HDL组件可以提供360度的方位视角和26.5度的高度视角,以及15Hz的画面更新率(frame refresh rate),还有以每秒100万点速度填入的点云(point cloud)。
光脉冲以前一直被用来测量距离,这种基础技术用雷射二极管发射光脉冲;光线会一直传播,直到遇到一个目标,此时一部分光能会被反射回发射器,在靠近发射器的地方安装的光子检测器会检测到这个反射回来的讯号,而发射脉冲和接收脉冲的时差确定了目标的距离,若启动这个脉冲距离测量系统,则可以收集到大量的采样点(也就是「点云」)。
如果没有出现任何目标物,那么发射出去的光永远不会返回任何反射讯号;如果光线是指向地面,路面就会提供返回讯号。如果目标位于点云中,就可以在数据中看到一个缺口(notch),根据这个缺口即可确定目标物的距离和宽度。透过点云中收集的点,便可形成周边环境的3D影像;点云越密集,影像就越丰富。
图2 传统的单发射器/检测器配对之雷射传感器应用。(图片来源:Velodyne)
3D LiDAR 方案实现3D LiDAR的一种方法是在镜子旋转时上下移动发射器/检测器──有时称为「眨眼(winking)」或「点头(nodding)」──这将产生高度(elevation)数据点,但也会减少方位数据点的数量,从而降低点云密度,造成系统分辨率降低。
另外一种方法是「快闪(flash)LiDAR」,该类系统运作时会同时照亮一大片区域,然后在一个专属2D焦平面数组(FPA)上撷取所产生的像素距离(pixel-distance)信息;这种类型的传感器很复杂、生产不易,因此没有获得广泛商用,然而有一天可望替代机械致动传感器,因为它们是固态组件,不需要活动零件。
业界还有许多不同配置的3D点云系统,但这些系统目前还无法满足自动驾驶车辆的安全性需求;举例来说,有许多系统能够拍到很棒的照片,但拍一张就得好几分钟,这种系统就不适合行动感测应用。当然也有具备优异更新率的快闪系统,但视场不足且距离性能也不够;还有可提供实用讯的单束系统,但当目标物体太小或落在装置视场以外,这种系统就无法发挥作用。
为了使LiDAR传感器适应最多的使用情境,有必要看清收集点四周的每个角落,即全360度。另外,处理后的数据需要实时递送给用户,因此在数据收集和渲染影像之间的延迟必须最小化;例如在自动驾驶导航领域,零点几秒的人类反应时间一般是可以接受的,因此保证导航计算机的更新率至少每秒十次是很实际的要求。垂直视场需要扩展到地平线之外,以防汽车开进路面凹陷处;也应该尽可能朝看清汽车前方的路面延伸,以适应道路凹陷或陡坡。
各种平价LiDAR传感器产品
Velodyne曾推出一款型号为VLP-32A的车用LiDAR传感器,这款命名为ULTRA Puck的产品(图3)号称是首款经济型、可满足美国汽车工程师学会(SAE)定义之汽车自动化1~5级要求的LiDAR传感器。福特(Ford)是第一家订购ULTRA Puck的汽车制造商,准备将其应用于该公司最近宣布扩编的自动驾驶车队,预计今年稍晚上路。
图3 Velodyne的ULTRA Puck传感器可实现长达200公尺的覆盖距离,支持32个LiDAR信道,其提升的分辨率可以更容易识别物体;这32个通道部署在28度的垂直视场上,并以独特的模式配置,能提高地平在线的感测分辨率。(图片来源:Velodyne)
加拿大业者LeddarTech的LiDAR解决方案Leddar(图4)也让人印象深刻;该公司有独立的先进驾驶辅助系统(ADAS)和在被动和主动安全系统中使用的经济型LiDAR,并能为先进的传感器融合之整合提供原始数据量测。其传感器冗余(Sensor Redundancy)突破了其他传感器的局限性,可避免系统故障和检测误差,并改善各种环境条件下的检测。其应用于自动驾驶的360度点云功能,则可满足更高分辨率和更高性能需求,未来还将提供支持360度和高分辨率检测的版本。
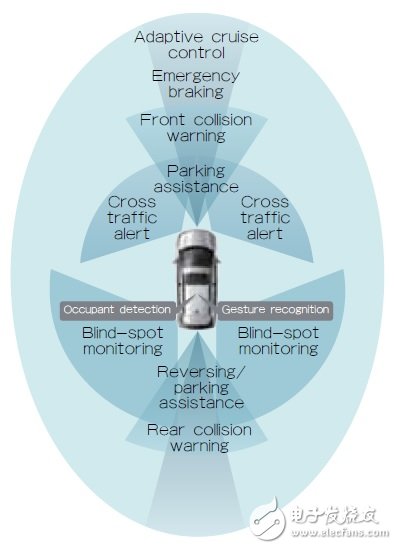
图 4 加拿大业者LeddarTech的LiDAR解决方案Leddar。
适合所有等级自动驾驶车辆且能绘制车辆周遭360度环境地图的经济型LiDAR,对司机、乘客、行人,和其他车辆乘客的安全来说都至关重要。Leddar芯片组的原始数据输出功能使其非常适合先进的传感器融合解决方案──这类方案将各种传感器传送过来的数据整合,来提供汽车四周的整体感知图。其特色包括:
˙能整合到ADAS和自动驾驶功能,固态LiDAR将代替或补充其中的摄影机和/或雷达。 ˙高密度3D点云LiDAR,可实现更高等级的自动驾驶。 ˙支援快闪/光束操控LiDAR(即MEMS微型反射镜)。 ˙覆盖距离达250公尺,视场达140 °,每秒多达48万个点(水平和垂直分辨率可小至0.25°)。
最后还有一家荷兰业者Innoluce(编按:英飞凌科技-Infineon已于10月宣布收购该公司)推出的车用LiDAR,号称能覆盖250公尺的目标范围,分辨率达0.1°,价格为100美元。
视觉影像传感器
虽然2D LiDAR很多时候是与视觉传感器整合,不过我们在这里只讨论视觉传感器本身。首先是Mobileye的方案,Mobileye Shield+是Tesla采用的一种非常先进的防碰撞系统,支持Vision Zero交通事故零伤亡愿景(这是一个获得许多国家支持的交通安全目标,即实现无致命或严重伤亡的公路系统,是1997年10月由瑞典发起);不过该系统仅能在即将与行人发生碰撞时提醒驾驶,不能检测无生命的物体。
Mobileye的防碰撞系统具有以下功能:
˙行人和与骑士碰撞警告(Mobileye PCW)。 ˙正向碰撞警告(Mobileye PCW)。 ˙前方车距监测警告(Mobileye HMW)。 ˙车道偏离警告(MobileyeLDW)。 ˙道路限速指示(SLI)。
此外该公司的Mobileye 5系统支持蓝牙,可以透过智能型手机应用程序提供驾驶人实时音/视讯警告。
美国乔治亚理工学院(Georgia Institute of Technology)提出了一种创新的3D系统封装架构,不仅考虑了电气、机械和散热设计,还考虑了新的数字、射频、传感器、雷达毫米波和电源技术;他们计划开发高度创新、以大面板为基础的超薄玻璃封装,以及在电气、热、机械设计、材料、制程、绕线微影、精细间距、高吞吐组装,及用于讯号、电源传输和导热的高传导性铜通孔(through Coppervias)等方面的创新。
透过开发防碰撞传感器来强化自动驾驶车辆技术,还需实现更多进步,才能实现与城市基础设施连结的新时代,如图5所示。
图5 与周围基础设施的无线连结,是提升自动驾驶车辆安全性所需的关键因素之一。
汽车传感器和通讯技术领域的最新发展,提高了驾驶对车辆周边环境的能见度和意识,并实现了其他许多令人惊叹的功能,比如停车辅助、自适应巡航控制、车道维持辅助、交通标志识别和行人侦测等,如图6所示。

图6 新一代传感器技术进一步强化了ADAS功能。
IC整合/封装
汽车电子系统需要执行包括无线通信在内的许多功能,需要应用于与自动驾驶安全相关数据处理的无线感测、立体摄影机、毫米波电子组件、高频电子组件或光子组件,还有用于电动车的高功率、高温电子组件。
将以上所有组件透过晶体管整合为单芯片,或是以堆栈式封装/系统级封装(SiP)的多芯片形式整合在一起,是超越摩尔定律(More than Moore‘s Law)的技术;而为了完整系统整合的「系统摩尔定律(System Moore’s Law,SM)」概念则催生了「汽车系统级封装(Automotive System-on Package,A-SOP)」,具备旁大且极具成长潜力的市场(图7)。
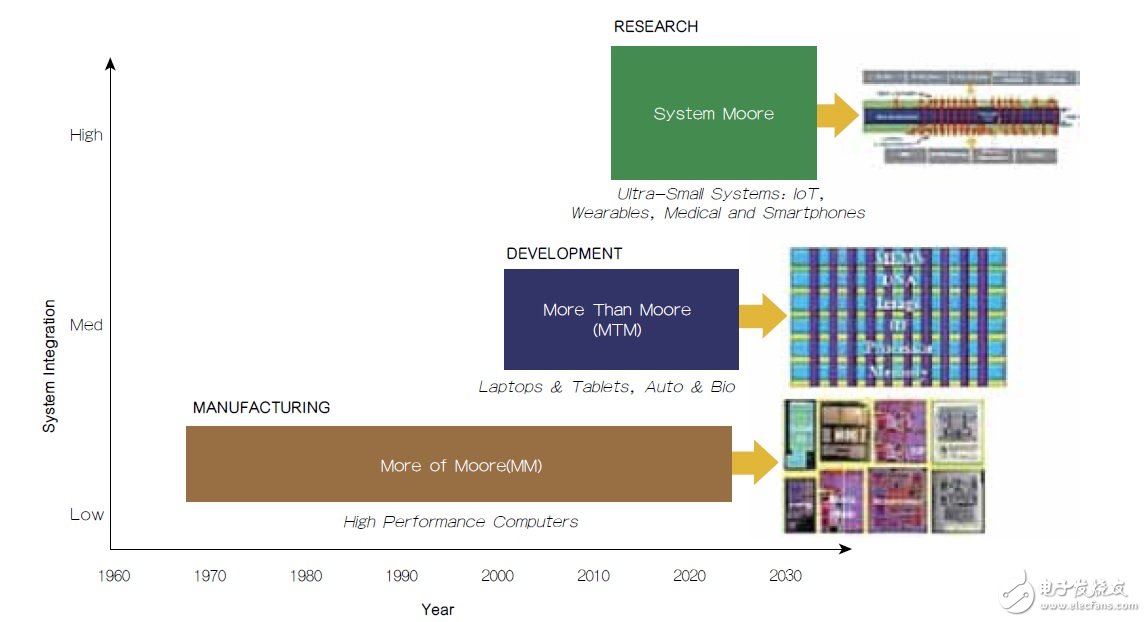
图7 乔治亚理工学院提出了成立汽车电子产业联盟的构想。
看见周遭人类与接近某个现场
高度自动化和自动驾驶车辆的开发人员必须考察复杂的人类行为,让自动驾驶汽车能观察、理解、模型化、推断和预测车厢内的乘客以及车辆周遭行人、汽车行驶区域内的人类行为(图8)。
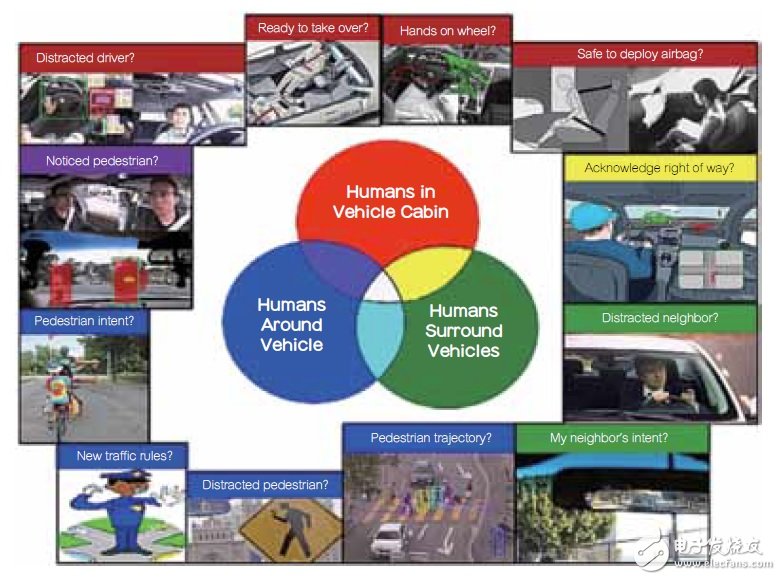
图8 高度自动化和自动驾驶汽车必须要能理解车辆周遭人类行为。
而因为成像研究已经取得了显著的进步,这将有助于控制空间接近(space approach);这些类型的研究和实验将有助于阻止自动驾驶车辆发生交通事故并危及人身安全,因为这些传感器系统正随着算法的成熟不断演进(图9)。
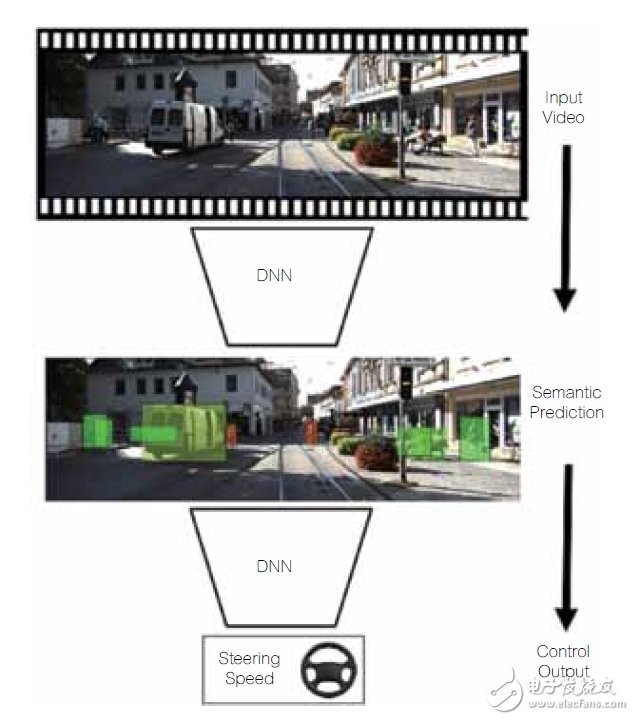
图9 这是采用了深度神经网络(DNN)的影像到控制策略流水线(调节语义感知)案例——先是语义场景元素(semantic scene element)的预测,然后是控制策略算法。
关于以整体性方法了解一个状况的来龙去脉,以及处理许多异常和意料之外场景和目标物的相关技术,还有许多需要学习的;包括对观察到的物体(包括人和汽车)之细微短/长期活动信息加以扩展分析,以及在被完全不可预知的人或车辆包围的条件下预测活动事件并做出决策的预测等。
声音检测和分析
目前的麦克风产品发展以及声音质量技术已经有重大进步,因此笔者认为自动驾驶车辆的另一个传感器数据源一定是声音;这种新增的听觉输入与所有视觉传感器,将共同为处理器和算法添加另一层信息输入,这有助于提高关键的决策判断能力,从而确保道路上自动驾驶车辆的安全。
人类对汽车喇叭,以及救护车、消防车和警车的警笛声都会有所反应,笔者相信我们也需要为自动驾驶车辆增加听觉,以完善对驾驶人的模拟。
麦克风技术已有不少提升,包括声音质量,以及具备能够耐受恶劣车用环境的高强韧度MEMS设计,还有降低噪声、低功耗运作以及动态范围等性能的改善。
小结
我们可以说,要决定是否让不需要人类干预之全自动驾驶车辆上路,现在还不是时候;还有许多工作要做。而传感器科学与工程技术还有成熟的算法正在快速发展,以预测人类和汽车的随机行为并迅速做出反应,目标是避免车辆和财物的损失,当然还有最重要的──保障人们的生命安全。








 工商网监
工商网监
评论