

















1 引言
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理
长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
在根据转子磁链定向的两相同步旋转坐标系下,感应电动机矢量控制系统的控制方程为:
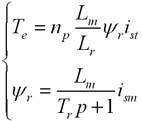
(1)
从式(1)中可以看出,转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。
按转子磁链定向的矢量控制系统的关键是准确定向。但是,转子磁链的直接检测非常困难,而利用磁链模型间接估算磁链的方法又受到电机参数变化的影响,造成控制的不准确。因此,与其用磁链闭环控制而反馈不准,不如采用磁链开环控制,使得系统简单、可靠。采用磁链开环的控制方式,无需转子磁链的幅值,但对于矢量坐标变换而言,仍然需要转子磁链的位置信号。由此可知,转子磁链的计算仍然不可避免,如果利用给定值间接计算转子磁链的位置,可简化系统结构,这种方法称为间接定向。间接定向的矢量控制系统借助于矢量控制方程中的转差公式,构成转差型矢量控制系统[1]。
本文设计了一个转差型矢量控制系统。其控制思想是:在控制过程中,使电机转子磁链始终保持不变,电机的转矩就能和稳态工作时一样,主要由转差率来决定。按照这个思路,就可以从转子磁链直接得到定子电流m轴分量的给定值,再通过对定子电流的有效控制,避免了磁通的闭环控制。这种控制方法用转差率和测量的转速相加后积分来估算转子磁链的位置,结构比较简单,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平。其系统模型如图1所示。

图1 转差型矢量控制系统原理图









 工商网监
工商网监
用户评论
共 0 条评论