

















根据以上的原理分析,搭建了感应电动机转差型矢量控制系统模型,利用matlab的工具软件simulink对系统进行仿真分析。系统仿真模型如图2所示。

图2 感应电动机转差型矢量控制系统仿真模型
在仿真系统中,转速调节器、转矩调节器和磁链调节器均采用输出限幅的pi调节。仿真波形如图3至图5所示。仿真结果表明磁链开环间接型矢量控制系统具有良好的控制性能。
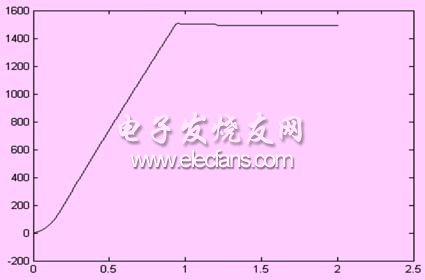
图3 转速响应
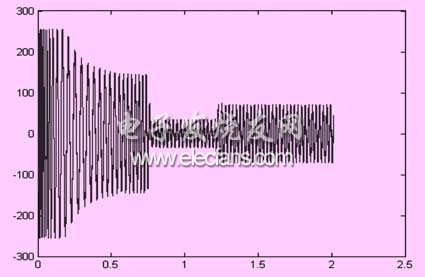
图4 三相电流波形
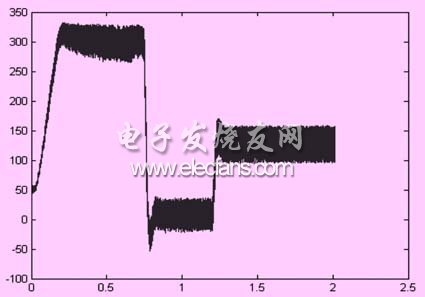
图5 输出转矩
4 系统硬件电路设计
由于数字信号处理器dsp具有硬件电路简单、控制算法灵活,抗干扰能力强、无漂移、兼容性好等优点,现已广泛应用于交流电动机控制系统中,因此设计采用以dsp作为控制核心的数字控制系统。
系统采用交-直-交变压变频电路,输入单相220v交流电,输出三相交流电来控制感应电动机。控制电路以dsp芯片tms320lf2407为核心,构成功能齐全的全数字转差型矢量控制系统。整个系统主要包括主电路和控制电路两部分。
4.1 主电路
主电路是功率变换的执行机构,包括整流电路、滤波电路、能耗电路和逆变电路。本系统采用交-直-交电压型主电路,先把频率固定的交流电整流成直流电,再把直流电逆变成频率连续可调的三相交流电。逆变电路采用型号为ir16up60a的ipm模块,该模块包含了栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路。该智能模块的应用,减小了装置的体积,提高了系统的性能与可靠性。
4.2 控制电路
系统的控制电路以tms320lf2407为控制核心,完成电流信号与转速信号检测、控制算法的实现以及相应的pwm信号输出。检测电路又分为电流检测和转速检测两部分。









 工商网监
工商网监
用户评论
共 0 条评论