 机器视觉基本概念学习笔记5
机器视觉基本概念学习笔记5
3、镜头(lens)
人类的视觉是依靠眼睛中的晶状体将景物的像投影在视网膜上,“花花世界”才被人类感知。相机中的传感器(CCD或CMOS)相当于人眼中的视网膜,那么镜头就相当于晶状体,必须通过镜头来摄取世界万物,人类的眼睛如果焦距出现误差(近视眼),则会出现无法正确的分辨事物,同样作为数码相机的镜头,其最主要的特性也是镜头的焦距值。镜头的焦距不同,能拍摄的景物广阔程度就不同,照片效果也迥然相异。
镜头一般都由光学系统和机械装置两部分组成,光学系统由若干透镜(或反射镜)组成,以构成正确的物像关系,保证获得正确、清晰的影像,它是镜头的核心;
而机械装置包括固定光学元件的零件(如镜筒、透镜座、压圈、连接环等),镜头调节机构(如光圈调节环、调焦环等),连接机构(比如常见的C、CS接口)等;此外,也有些镜头上具有自动调光圈、自动调焦或感测光强度的电子机构。
镜头按焦距大小可以分为长焦镜头、标准镜头、广角镜头等;按用途通常可以分为安防用镜头(CCTV lens)、工业自动化镜头(FA lens),广播级别的镜头(Broadcast lens),高清晰电视用镜头(HD lens);机器视觉行业内通常将镜头分为宏镜头(macro lens)、定倍镜头(fixed-mag lens)、变焦镜头(zoom镜头)、远心镜头(telecentric lens)、高精度或百万像素镜头(High Resolution or million pixels lens)等。
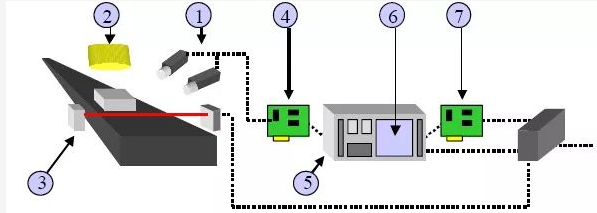
当然,这些分类并没有严格的划分界线。对于镜头有关的光学参数我们可以将焦距f、光圈系数(相对孔径)、像方视场(即支持的CCD芯片大小)以及像差(比如畸变、场曲等)看作镜头的内部参数,而图3.3.1所示的是一个简单视觉系统的镜头外部主要参数需求,通常是用户搭建视觉系统所最关心的,主要包括视场(FOV)、分辨率(Resolution)、工作距离(WD)和景深(DOF)。
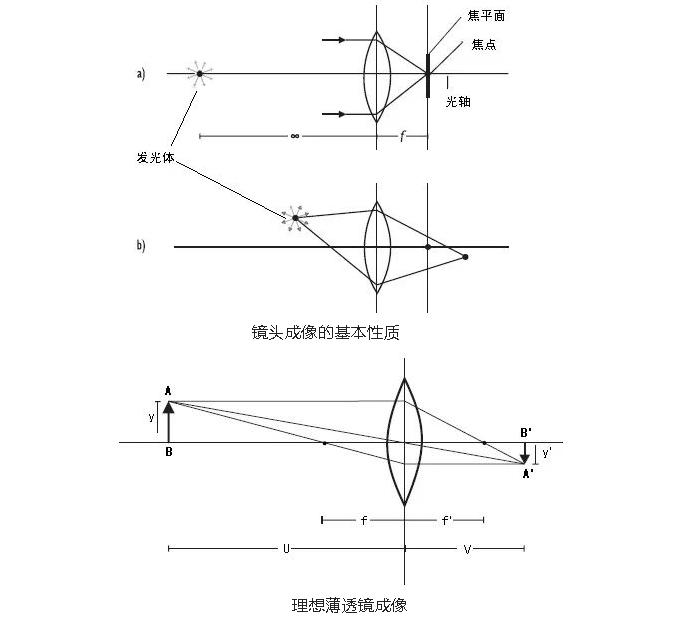
为了解释清楚镜头参数,让我们先简单的介绍一点光学基础。图展示了镜头成像的基本性质,图中a所示假设发光体位于无限远处(无穷远处物体所发光被认为是平行光),放置镜头与这些平行光垂直,这些光线将聚集在一点,这一点就是所谓的焦点。换句话说,焦点是无限远处光源的映射。
镜头与焦点之间的距离成为焦距f。因此,如果我们想要获取一个CCD传感器上的无限远的物体,镜头与传感器的距离就会正好是镜头的焦距。如果将发光体移近镜头,如图中b所示,镜头就将光线聚焦在焦点前面,因此如果要获取尖锐的图像,就必须增加镜头与传感器的距离。这不仅仅应用于理想的薄透镜,也可以应用于实际由多镜片组成的复合镜头。
当镜头应用于高精度的检测场合时,必须清楚理想薄透镜公式与实际透镜组计算公式。对于一般的应用,理想薄透镜或是小孔成像原理可以被应用到一般的视觉系统中。因此,镜头对焦意味着改变镜头本身与CCD传感器的距离,距离改变靠机械装置进行约束。
理想薄透镜成像
而上图所示的高斯公式则是对于理想薄透镜的基本透镜公式。在平常使用中,我们经常需要决定焦距。其基本公式为:
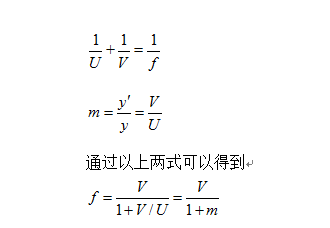
其中,V和U分别是镜头光心到图像传感器的距离和镜头光心到物体的距离,和分别是图像的大小和物体的大小。V与U之比就是放大因子(或称放大倍率)。
对成像理论进行简单介绍之后,接着对镜头参数进行介绍。对于普通用户最直观的2个内部参数分别是焦距、光圈,不少镜头这2个参数都是可调的(还有一个外部参数:工作距离在有些镜头上也是可调的)。对同一芯片尺寸的相机,视场角则可以看作焦距的另一种表达,它与焦距的关系式为:,这里,是CCD传感器的一个维的长度(水平、垂直或对角方向)。有时镜头可以根据它的视角来分类,实际上这一分类并不很严谨。按视场角对镜头比较典型的分类如下:
| 光学系统 | 望远物镜 远距摄像镜头 标准镜头 广角镜头 超广角镜头 |
|---|---|
| 视场 | 6° 12° 46° 65° >100° |
焦距(视场角)不仅仅描述镜头的屈光能力,且可作为图像质量的参考。一般镜头失真随着焦距的减小(或视场角的增大)而增大,因而选择测量镜头,不要选择小焦距(小于8mm)或大视场角的镜头。此外,即使不是变焦(ZOOM)镜头,普通镜头上也会有一个调焦环,但如前面提到的它没有改变镜头的焦距f,而只是改变镜头光心到图像传感器的距离V,从前面的公式可以看到这样同样可以改变镜头的放大倍率。
光圈系数是镜头的重要内部参数,它就是镜头相对孔径的倒数,一般的厂家都会用F数来表示这一参数。例如,如果镜头的相对孔径是1:2,那么其光圈也就是F2.0。而在相机的镜头上,都会标写上这一指标。而由于光圈系数是相对孔径的倒数,因此,如果光圈系数的标称值数字越大,也就表示其实际光圈就越小。一般来说,镜头的光圈排列顺序是:1、1.4、2.0、2.8、3.5、4.0、5.6、8.0、11、16、22、32等等。随着数值的增大,其实际光孔大小也就随之减小,而其在相同快门时间内的光通量也就随之减小。当然,有些视觉系统为了增大镜头的可靠性和降低成本,采用的定光圈设计,光圈不能改变时调整图像亮度就需要靠调整光源强度或相机增益。
像方视场(即支持的CCD芯片大小)同样是镜头的重要内部参数,CCD芯片尺寸在相机一节就已介绍,通常大小为1/3”, 1/2”。不同芯片规格要求相应的镜头规格。镜头的设计规格必须等于或大于芯片规格,否则就会出现如图所示的后果,在视场边缘会出现黑边。特别是在测量中,最好使用稍大规格的镜头,因为镜头往往在其边缘处失真最大。
作为镜头内部参数的像差,在机器视觉应用中最为关键的是畸变(变形率)和场曲(用于传感器接受的镜头该参数已被严格校正)。畸变会影响测量结果,特别是在精密测量中,还必须通过软件的方法进行标定和补偿。如图3.3.5所示,畸变主要分为两种:桶形畸变(Barrel)和枕形畸变(Pincushion),图中虚线方框表示物体应该成的理想像,很明显,畸变沿镜头径向变化并不是线性的,通常在视场边缘畸变最大,用于测量的镜头最大畸变需要小于1%。

镜头畸变
再接着阐述的镜头光学参数是与客户选择比较相关的外部参数,首先是视场(FOV),可以通过以下两个公式进行计算,式中V和H分别表示垂直和水平方向,M表示光学放大倍率,f表示焦距,WD表示工作距离。

然后对于镜头的分辨率则不能与相机的分辨率混为一谈,对于镜头,它的极限空间分辨能力受系统衍射极限的影响,按照瑞利判据,物镜的光学极限分辨距离为:
式中为波长;NA为物镜的物方数值孔径;n为物方介质折射率,这里是空气n=1;U为物方半孔径角的。对于相机的分辨率则在前面的相机一节有过介绍( FOV(V or H)/CCD像素数(V or H)),是一个与镜头分辨率无关的量,它们两者可以按Nyquist的采样理论联系起来,这里不再详述。那视觉系统的系统分辨率应该按哪个公式计算呢?很简单,系统分辨率应该是两者中小的那个,又由于镜头的分辨率一般都比相机分辨率高,因此绝大多数视觉系统都是按FOV与CCD像素数的比值来计算视觉系统的分辨率。
工作距离往往在视觉应用中至关重要,从公式中可以看出它与视场大小成正比,有些系统工作空间很小因而需要镜头有小的工作距离,但有的系统在镜头前可能需要安装光源或其它工作装置因而必须有较大的工作距离保证空间,通常FA镜头与监控镜头相比,小的工作距离就是一个重要区别。
景深则是镜头另一个重要的外部参数。它表示满足图像清晰度要求的最远位置与最近位置的差值,景深的计算可能会相对麻烦一些它与镜头焦距、光圈值、工作距离和允许弥散斑的最大直径有关。由于允许弥散斑的最大直径是个相对量,它的可接受直径很大程度上取决于应用,因此在实际视觉应用中以实验和参考镜头给出的参考值为主。
简单的说,光圈越小,景深越深;焦距越短,景深越深;对焦距离(工作距离)越远,景深越深。
在本节前面介绍表明镜头光学参数从技术的角度多是可选的。但实际商品化的镜头总是只是某些参数的标准产品,如果需要完全满足系统的要求可能需要定制镜头,这样价格就比平常应用贵很多。因此,很多时候镜头参数选择要分清自己视觉系统应用中的哪些是必须保证的,哪些是可以通过其它的方法折中的。
镜头接口
除了前面讨论的光学参数,实际上对于镜头我们需要处理一些额外的参数。首先有很多方法在相机上安装镜头,幸好机器视觉由C接口和CS接口的镜头和相机主导,比较例外的是高像素数的线扫描相机(2048像素以上),它需要比C接口镜头提供的图像格式更大,在这种情况下,通常利用的是尼康的F接口。
C接口与CS接口镜头唯一的区别就是他们背焦距。对C接口背距是17.5mm,对CS接口背距为12.5mm。因此,对C接口镜头可以增加一个5mm的扩展管,就可得到CS接口镜头。由于C接口标准是国际接受的,有很多镜头可供选择。对于这一规则有一重要例外:C接口的3CCD相机不能和C接口镜头协同工作。从机械的角度,各种C接口镜头的背焦距太长。另外,C接口镜头的光学特性不能总适合3CCD相机。因此,需要考虑相机厂商提供的兼容性列表。图所示就是C接口与CS接口之间正确的匹配和不正确的匹配方法。
远心镜头

普通的镜头与人眼一样,由于视场角的缘故看物体都存在“近大远小”的现象,如果这样的镜头用在测量系统中,物距常发生变化,从而使像高发生变化,所以测得的物体尺寸也发生变化,即产生了测量误差;另一方面,即使物距是固定的,也会因为CCD敏感表面不易精确调整在像平面上,同样亲会产生测量误差。为了解决上述问题,可以采用远心物镜。其中像方远心物镜可以消除物距变化带来的测量误差,而物方远心物镜则可以消除CCD位置不准带来的测量误差。下面的表格对传统镜头与远心镜头进行了简单对比。

扩展镜或延伸管
很多镜头为了适应更多的应用环境,常常在镜头中预留位置或在镜头两端预留螺纹,以方便扩展镜头用。这里所说的扩展镜是个广义的概念,可以指增倍镜,可以是滤光镜、偏振镜或差分镜,可以是转轴镜,可以是与延伸管功能类似的微距镜(减小工作距离),还可以是用以实现同轴照明的半透半反镜。具体的选择需要根据您的需要询问镜头供应商。
对于一个光学镜头的性能评估通常用分辨率(resolution) 、对比度(contrast)、像差(aberration)、MTF(modulation transfer function)、色彩平衡性(color balance)、周边光量(Peripheral illumination)、渐晕 (Vignetting)、光斑(flare)、镀膜(coating)等参数进行衡量,虽然这些与视觉成像有很大关系,但作为机器视觉的应用者,应该把这些参数的保障交给镜头生产者,而自己主要是选择合适的镜头类型并保证视场大小和分辨率要求,此外与视觉应用比较相关的还有工作距离、景深、畸变、均一充分的亮度、耐振荡冲击性和镜头本身的尺寸规格。
-
图像处理
+关注
关注
27文章
1320浏览量
57572 -
机器视觉
+关注
关注
163文章
4489浏览量
121951
发布评论请先 登录
人工智能基本概念机器学习算法
什么是机器学习_十张图带你解析机器学习的基本概念

常用机器学习算法的基本概念和特点
深度学习基本概念

智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
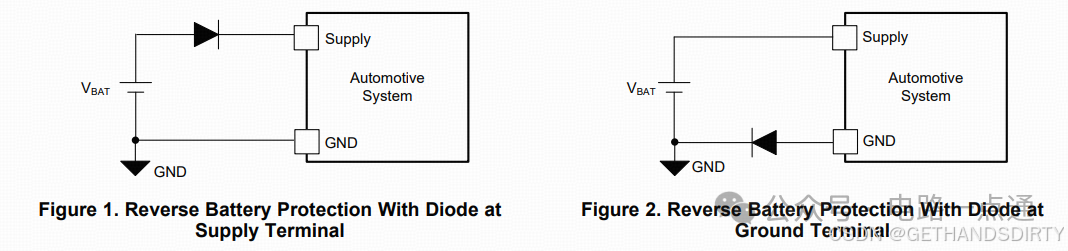
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
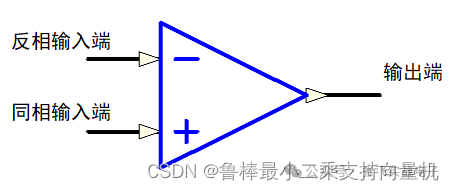
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
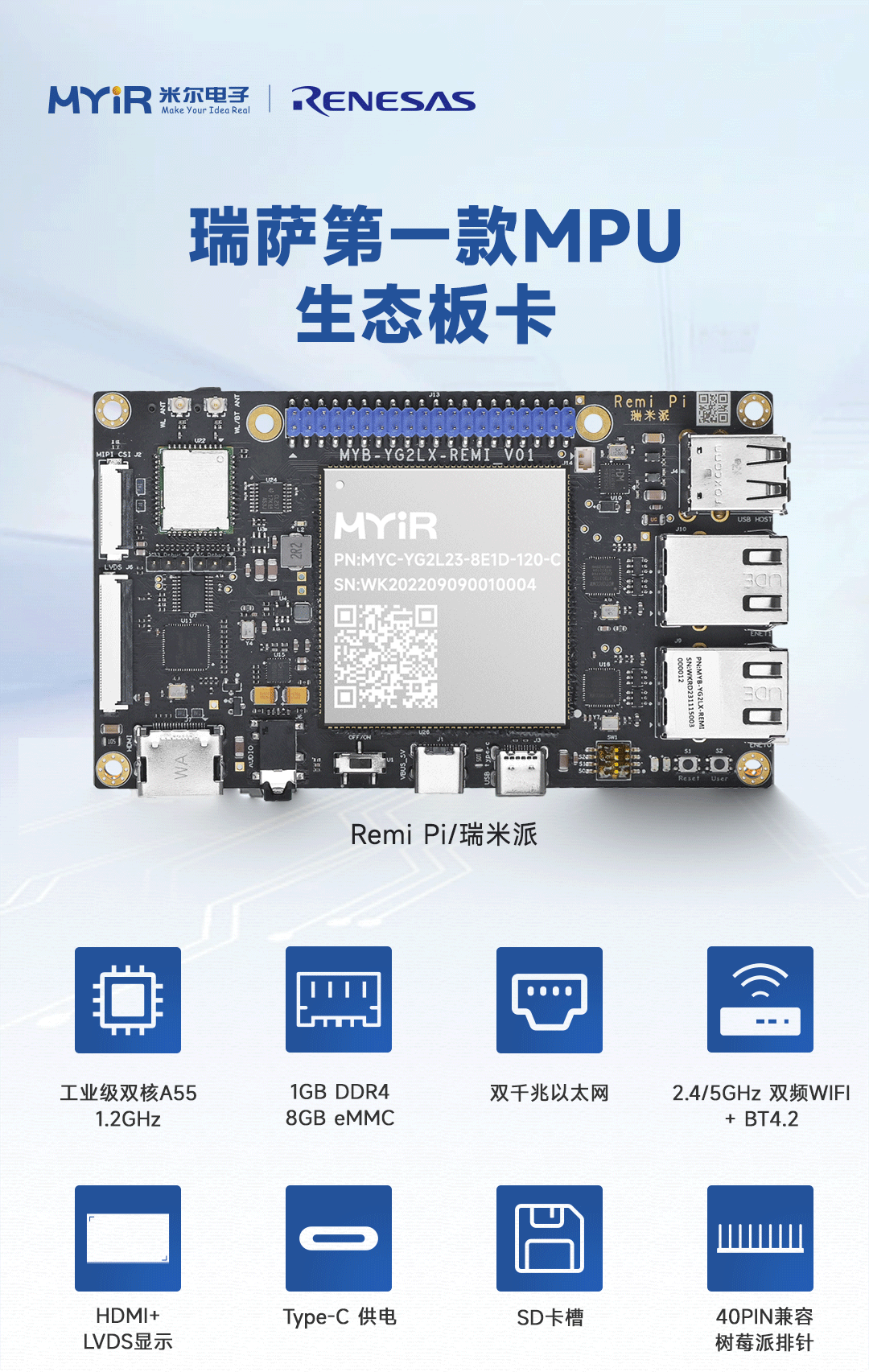
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
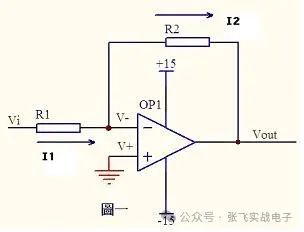
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
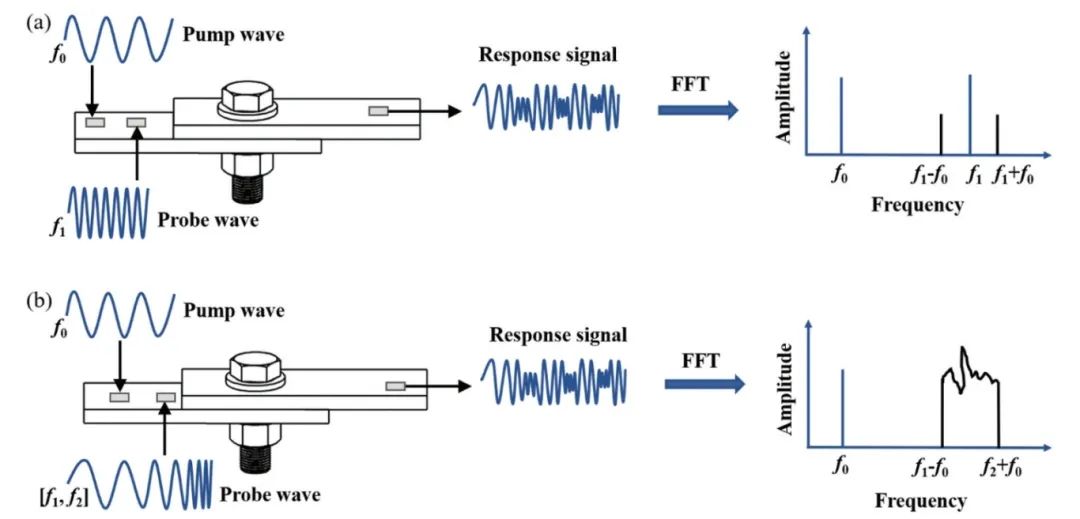
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
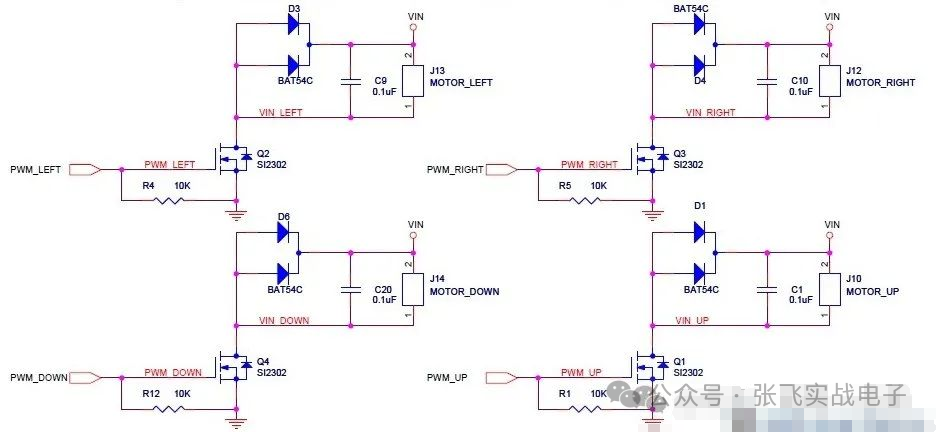
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
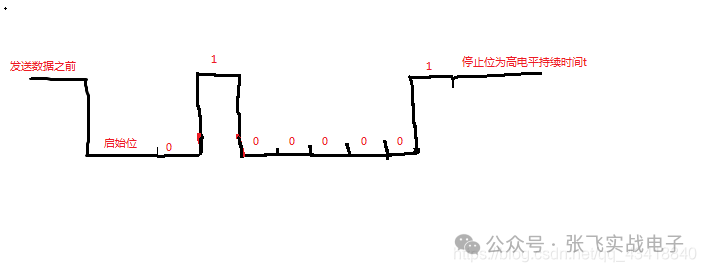
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。





 工商网监
工商网监
评论