 4个超实用的Docker镜像构建技巧
4个超实用的Docker镜像构建技巧
最近做了一个好玩的工具,叫xbin.io[1]。其中有一项工作是为不同的工具来构建 Docker 镜像,让他们都运行在 Docker 中(实际上,是兼容 Docker image 的其他 sandbox 系统,没有直接用 Docker)。支持的工具越来越多,为了节省资源,Build 的 Docker image 就越小越好,文件越少,其实启动速度也会略微快一些,也会更安全一些。
这篇文章来介绍一下做 Docker Image 的一些技巧。
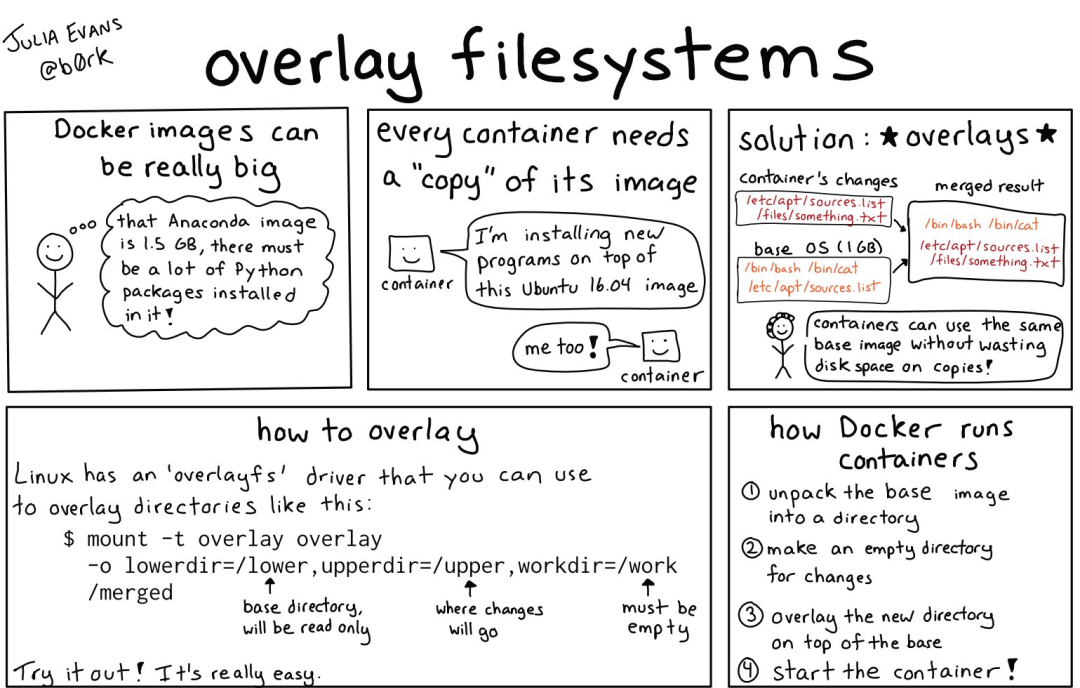
在之前的博客Docker (容器) 的原理[2]中介绍过 Docker image 是如何工作的。简单来说,就是使用 Linux 的overlayfs[3], overlay file system 可以做到,将两个 file system merge 在一起,下层的文件系统只读,上层的文件系统可写。如果你读,找到上层就读上层的,否则的话就找到下层的给你读。然后写的话会写入到上层。这样,其实对于最终用户来说,可以认为只有一个 merge 之后的文件系统,用起来和普通文件系统没有什么区别。
有了这个功能,Docker 运行的时候,从最下层的文件系统开始,merge 两层,得到新的 fs 然后再 merge 上一层,然后再 merge 最上一层,最后得到最终的 directory,然后用chroot[4]改变进程的 root 目录,启动 container。
了解了原理之后,你会发现,这种设计对于 Docker 来说非常合适:
- 如果 2 个 image 都是基于 Ubuntu,那么两个 Image 可以共用 Ubuntu 的 base image,只需要存储一份;
- 如果 pull 新的 image,某一层如果已经存在,那么这一层之前的内容其实就不需要 pull 了;
后面 build image 的技巧其实都是基于这两点。
另外稍微提一下,Docker image其实就是一个 tar 包[5]。一般来说我们通过Dockerfile用docker built命令来构建,但是其实也可以用其他工具构建,只要构建出来的image 符合 Docker 的规范[6],就可以运行。比如,之前的博文Build 一个最小的 Redis Docker Image[7]就是用 Nix 构建出来的。
技巧1:删除缓存
一般的包管理器,比如apt,pip等,下载包的时候,都会下载缓存,下次安装同一个包的时候不必从网络上下载,直接使用缓存即可。
但是在 Docker Image 中,我们是不需要这些缓存的。所以我们在Dockerfile中下载东西一般会使用这种命令:
RUNdnfinstall-y--setopt=tsflags=nodocs
httpdvim&&
systemctlenablehttpd&&
dnfcleanall
在包安装好之后,去删除缓存。
一个常见的错误是,有人会这么写:
FROMfedora
RUNdnfinstall-ymariadb
RUNdnfinstall-ywordpress
RUNdnfcleanall
Dockerfile 里面的每一个RUN都会创建一层新的 layer,如上所说,这样其实是创建了 3 层 layer,前 2 层带来了缓存,第三层删除了缓存。如同 git 一样,你在一个新的 commit 里面删除了之前的文件,其实文件还是在 git 历史中的,最终的 docker image 其实没有减少。
但是 Docker 有了一个新的功能,docker build --squash。squash 功能会在 Docker 完成构建之后,将所有的 layers 压缩成一个 layer,也就是说,最终构建出来的 Docker image 只有一层。所以,如上在多个RUN中写 clean 命令,其实也可以。我不太喜欢这种方式,因为前文提到的,多个 image 共享 base image 以及加速 pull 的 feature 其实就用不到了。
一些常见的包管理器删除缓存的方法:
| yum | yum clean all |
|---|---|
| dnf | dnf clean all |
| rvm | rvm cleanup all |
| gem | gem cleanup |
| cpan | rm -rf ~/.cpan/{build,sources}/* |
| pip | rm -rf ~/.cache/pip/* |
| apt-get | apt-get clean |
另外,上面这个命令其实还有一个缺点。因为我们在同一个RUN中写多行,不容易看出这个dnf到底安装了什么。而且,第一行和最后一行不一样,如果修改,diff 看到的会是两行内容,很不友好,容易出错。
可以写成这种形式,比较清晰。
RUNtrue
&&dnfinstall-y--setopt=tsflags=nodocs
httpdvim
&&systemctlenablehttpd
&&dnfcleanall
&&true
技巧2:改动不频繁的内容往前放
通过前文介绍过的原理,可以知道,对于一个 Docker image 有 ABCD 四层,B 修改了,那么 BCD 会改变。
根据这个原理,我们在构建的时候可以将系统依赖往前写,因为像apt,dnf这些安装的东西,是很少修改的。然后写应用的库依赖,比如pip install,最后 copy 应用。
比如下面这个 Dockerfile,就会在每次代码改变的时候都重新 Build 大部分 layers,即使只改了一个网页的标题。
FROMpython:3.7-buster
#copysource
RUNmkdir-p/opt/app
COPYmyapp/opt/app/myapp/
WORKDIR/opt/app
#installdependenciesnginx
RUNapt-getupdate&&apt-getinstallnginx
RUNpipinstall-rrequirements.txt
RUNchown-Rwww-data:www-data/opt/app
#startserver
EXPOSE8020
STOPSIGNALSIGTERM
CMD["/opt/app/start-server.sh"]
我们可以改成,先安装 Nginx,再单独 copyrequirements.txt,然后安装pip依赖,最后 copy 应用代码。
FROMpython:3.7-buster
#installdependenciesnginx
RUNapt-getupdate&&apt-getinstallnginx
COPYmyapp/requirements.txt/opt/app/myapp/requirements.txt
RUNpipinstall-rrequirements.txt
#copysource
RUNmkdir-p/opt/app
COPYmyapp/opt/app/myapp/
WORKDIR/opt/app
RUNchown-Rwww-data:www-data/opt/app
#startserver
EXPOSE8020
STOPSIGNALSIGTERM
CMD["/opt/app/start-server.sh"]
技巧3:构建和运行 Image 分离
我们在编译应用的时候需要很多构建工具,比如 gcc, golang 等。但是在运行的时候不需要。在构建完成之后,去删除那些构建工具是很麻烦的。
我们可以这样:使用一个 Docker 作为 builder,安装所有的构建依赖,进行构建,构建完成后,重新选择一个 Base image,然后将构建的产物复制到新的 base image,这样,最终的 image 只含有运行需要的东西。
比如,这是安装一个 golang 应用pup的代码:
FROMgolangasbuild
ENVCGO_ENABLED0
RUNgoinstallgithub.com/ericchiang/pup@latest
FROMalpine:3.15.4asrun
COPY--from=build/go/bin/pup/usr/local/bin/pup
我们使用golang这个 1G 多大的 image 来安装,安装完成之后将 binary 复制到 alpine, 最终的产物只有 10M 左右。这种方法特别适合一些静态编译的编程语言,比如 golang 和 rust.
技巧4:检查构建产物
这是最有用的一个技巧了。
dive 是一个 TUI,命令行的交互式 App,它可以让你看到 docker 每一层里面都有什么。
dive ubuntu:latest命令可以看到 ubuntu image 里面都有什么文件。内容会显示为两侧,左边显示每一层的信息,右边显示当前层(会包含之前的所有层)的文件内容,本层新添加的文件会用黄色来显示。通过tab键可以切换左右的操作。
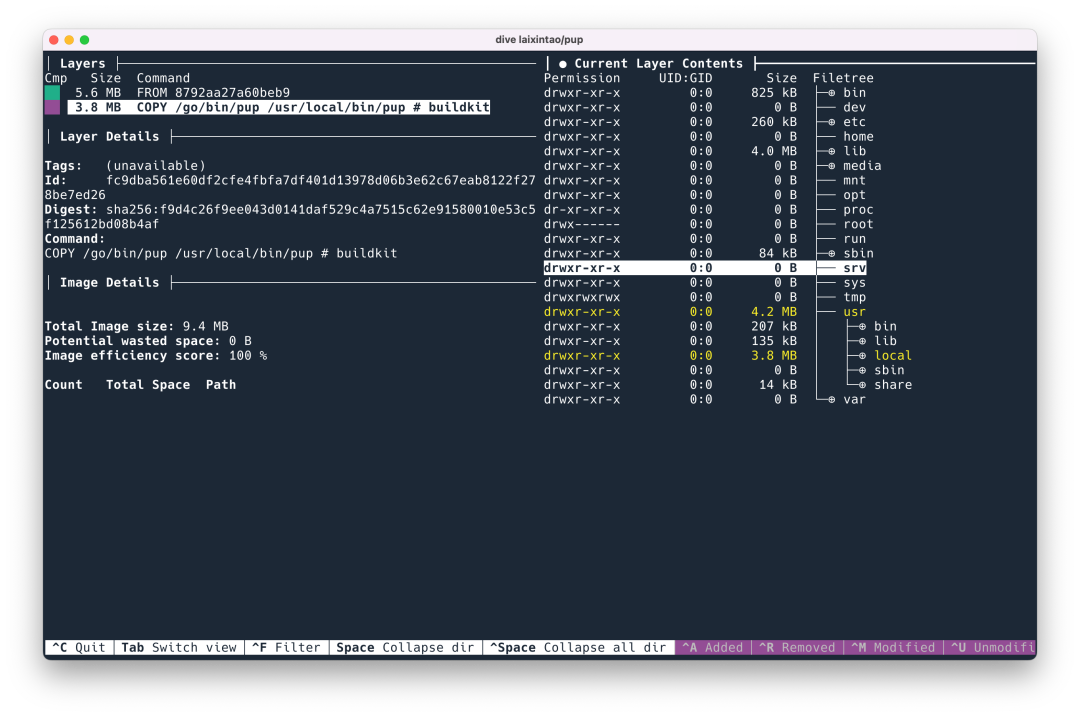
一个非常有用的功能是,按下ctrl+U可以只显示当前层相比于前一层增加的内容,这样,就可以看到增加的文件是否是预期的了。
按ctrl+Space可以折叠起来所有的目录,然后交互式地打开他们查看,就像是 Docker 中的ncdu。
审核编辑 :李倩
-
进程
+关注
关注
0文章
206浏览量
14187 -
镜像
+关注
关注
0文章
178浏览量
11080 -
Docker
+关注
关注
0文章
503浏览量
12595
原文标题:4 个超实用的 Docker 镜像构建技巧
文章出处:【微信号:良许Linux,微信公众号:良许Linux】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
构建ARM64版本nacos docker镜像
应用Docker完成构建一个微服务开发任务

Docker:微容器的优势与构建教程
浅析Docker镜像本地存储机制及容器启动原理
docker 搜索镜像,docker查看镜像详细信息(docker下载镜像命令)
Dockerfile定义Docker镜像的构建过程
构建docker镜像应该遵循哪些原则
如何使用dockerfile创建镜像

Docker-镜像的分层-busybox镜像制作

基于Docker镜像逆向生成Dockerfile


智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
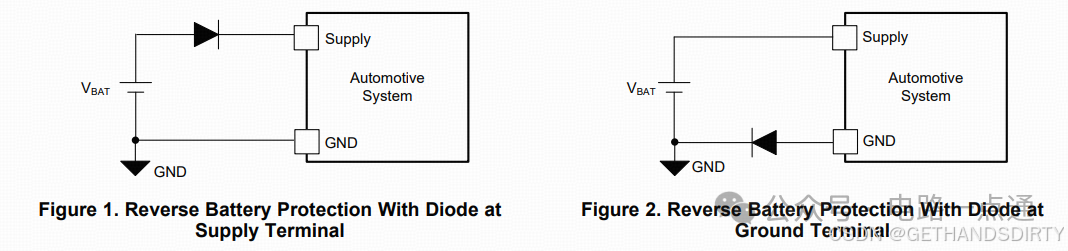
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
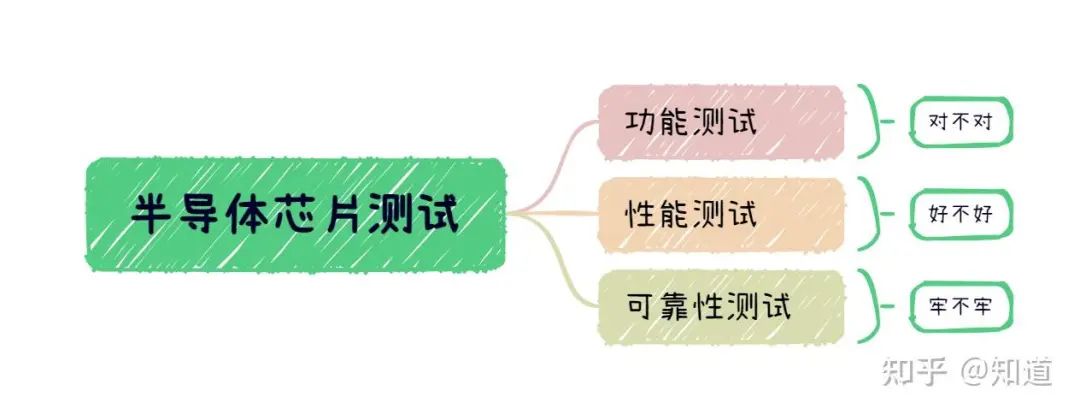
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
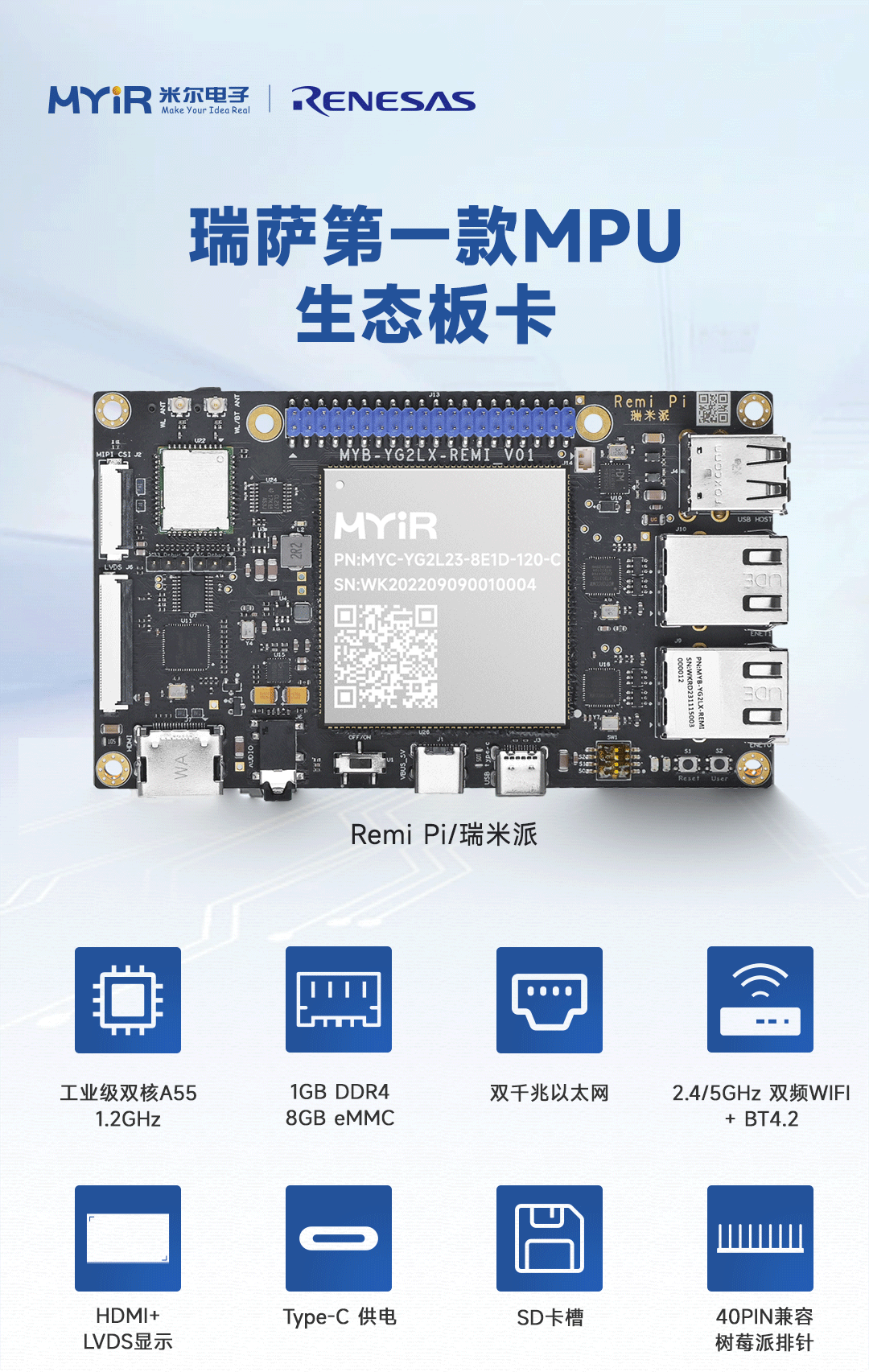
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
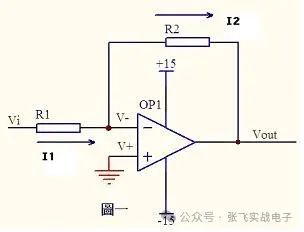
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
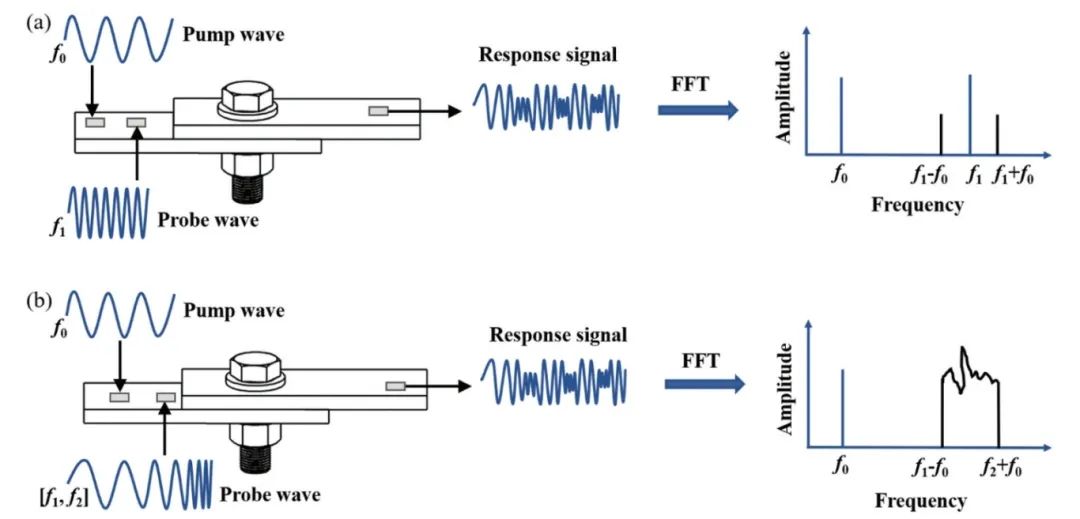
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。





 工商网监
工商网监
评论