 FreeRTOS的移植
FreeRTOS的移植
前言
我为什么会写移植呢,因为是公众号有一个兄弟想要我写一份移植的教程,所以应它要求我就写了一篇。
准备
在移植之前,我们首先要获取到FreeRTOS的官方的源码包。这里我们提供两个下载链接:
一个是官网:http://www.freertos.org/
另外一个是代码托管网站:https://sourceforge.net/projects/freertos/files/FreeRTOS/
打开网站链接之后,我们选择FreeRTOS的最新版本V9.0.0(2016年),尽管现在FreeRTOS的版本已经更新到V10.0.1了,但是我们还是选择V9.0.0,因为内核很稳定,并且网上资料很多,因为V10.0.0版本之后是亚马逊收购了FreeRTOS之后才出来的版本,主要添加了一些云端组件,我们本书所讲的FreeRTOS是实时内核,采用V9.0.0版本足以。
简单介绍FreeRTOS
FreeRTOS包含Demo例程和内核源码(比较重要,我们就需要提取该目录下的大部分文件)。
Source文件夹里面包含的是FreeRTOS内核的源代码,我们移植FreeRTOS的时候就需要这部分源代码;
Demo 文件夹里面包含了FreeRTOS官方为各个单片机移植好的工程代码,FreeRTOS为了推广自己,会给各种半导体厂商的评估板写好完整的工程程序,这些程序就放在Demo这个目录下,这部分Demo非常有参考价值。

在这里插入图片描述
Source文件夹
这里我们再重点分析下FreeRTOS/ Source文件夹下的文件,①和③包含的是FreeRTOS的通用的头文件和C文件,这两部分的文件试用于各种编译器和处理器,是通用的。需要移植的头文件和C文件放在②portblle这个文件夹。

在这里插入图片描述
portblle文件夹,是与编译器相关的文件夹,在不同的编译器中使用不同的支持文件。①中的KEIL就是我们就是我们使用的编译器,其实KEIL里面的内容跟RVDS里面的内容一样,所以我们只需要③RVDS文件夹里面的内容即可,里面包含了各种处理器相关的文件夹,从文件夹的名字我们就非常熟悉了,我们学习的STM32有M0、M3、M4等各种系列,FreeRTOS是一个软件,单片机是一个硬件,FreeRTOS要想运行在一个单片机上面,它们就必须关联在一起。MemMang文件夹下存放的是跟内存管理相关的源文件。

在这里插入图片描述
移植过程
提取源码
-
首先在我们的STM32裸机工程模板根目录下新建一个文件夹,命名为“FreeRTOS”,并且在FreeRTOS文件夹下新建两个空文件夹,分别命名为“src”与“port”,src文件夹用于保存FreeRTOS中的核心源文件,也就是我们常说的‘.c文件’,port文件夹用于保存内存管理以及处理器架构相关代码,这些代码FreeRTOS官方已经提供给我们的,直接使用即可,在前面已经说了,FreeRTOS是软件,我们的开发版是硬件,软硬件必须有桥梁来连接,这些与处理器架构相关的代码,可以称之为RTOS硬件接口层,它们位于FreeRTOS/Source/Portable文件夹下。
-
打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\\FreeRTOS\\Source”目录下找到所有的‘.c文件’,将它们拷贝到我们新建的src文件夹中,

在这里插入图片描述
-
打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\\FreeRTOS\\Source\\portable”目录下找到“MemMang”文件夹与“RVDS”文件夹,将它们拷贝到我们新建的port文件夹中

在这里插入图片描述
-
打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\\ FreeRTOS\\Source”目录下找到“include”文件夹,它是我们需要用到FreeRTOS的一些头文件,将它直接拷贝到我们新建的FreeRTOS文件夹中,完成这一步之后就可以看到我们新建的FreeRTOS文件夹已经有3个文件夹,这3个文件夹就包含FreeRTOS的核心文件,至此,FreeRTOS的源码就提取完成。

在这里插入图片描述



添加到工程
添加FreeRTOSConfig.h文件
FreeRTOSConfig.h文件是FreeRTOS的工程配置文件,因为FreeRTOS是可以裁剪的实时操作内核,应用于不同的处理器平台,用户可以通过修改这个FreeRTOS内核的配置头文件来裁剪FreeRTOS的功能,所以我们把它拷贝一份放在user这个文件夹下面。
打开FreeRTOSv9.0.0源码,在“FreeRTOSv9.0.0\\FreeRTOS\\Demo”文件夹下面找到“CORTEX_STM32F103_Keil”这个文件夹,双击打开,在其根目录下找到这个“FreeRTOSConfig.h”文件,然后拷贝到我们工程的user文件夹下即可,等下我们需要对这个文件进行修改。
创建工程分组
接下来我们在mdk里面新建FreeRTOS/src和FreeRTOS/port两个组文件夹,其中FreeRTOS/src用于存放src文件夹的内容,FreeRTOS/port用于存放port\\MemMang文件夹 与port\\RVDS\\ARM_CM3文件夹的内容。
然后我们将工程文件中FreeRTOS的内容添加到工程中去,按照已经新建的分组添加我们的FreeRTOS工程源码。
在FreeRTOS/port分组中添加MemMang文件夹中的文件只需选择其中一个即可,我们选择“heap_4.c”,这是FreeRTOS的一个内存管理源码文件。
添加完成后:

在这里插入图片描述
** 添加头文件路径**
FreeRTOS的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径,不然编译会报错。FreeRTOS的源码里面只有FreeRTOS\\include和FreeRTOS\\port\\RVDS\\ARM_CM3这两个文件夹下面有头文件,只需要将这两个头文件的路径在开发环境里面指定即可。同时我们还将FreeRTOSConfig.h这个头文件拷贝到了工程根目录下的user文件夹下,所以user的路径也要加到开发环境里面。

在这里插入图片描述
修改FreeRTOSConfig.h
FreeRTOSConfig.h是直接从demo文件夹下面拷贝过来的,该头文件对裁剪整个FreeRTOS所需的功能的宏均做了定义,有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。要想随心所欲的配置FreeRTOS的功能,我们必须对这些宏定义的功能有所掌握,下面我们先简单的介绍下这些宏定义的含义,然后再对这些宏定义进行修改。
1#ifndef FREERTOS_CONFIG_H
2#define FREERTOS_CONFIG_H
3
4#include "stm32f10x.h"
5#include "bsp_usart.h"
6
7
8//针对不同的编译器调用不同的stdint.h文件
9#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
10 #include <stdint.h>
11 extern uint32_t SystemCoreClock;
12#endif
13
14//断言
15#define vAssertCalled(char,int) printf("Error:%s,%d\\r\\n",char,int)
16#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)
17
18/************************************************************************
19 * FreeRTOS基础配置配置选项
20 *********************************************************************/
21/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)
22 *
23 * 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。
24 * 协作式操作系统是任务主动释放CPU后,切换到下一个任务。
25 * 任务切换的时机完全取决于正在运行的任务。
26 */
27#define configUSE_PREEMPTION 1
28
29//1使能时间片调度(默认式使能的)
30#define configUSE_TIME_SLICING 1
31
32/* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务:
33 * 通用方法和特定于硬件的方法(以下简称“特殊方法”)。
34 *
35 * 通用方法:
36 * 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。
37 * 2.可以用于所有FreeRTOS支持的硬件
38 * 3.完全用C实现,效率略低于特殊方法。
39 * 4.不强制要求限制最大可用优先级数目
40 * 特殊方法:
41 * 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。
42 * 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。
43 * 3.比通用方法更高效
44 * 4.一般强制限定最大可用优先级数目为32
45 * 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!
46 */
47#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1
48
49/* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行
50 * 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决
51 *
52 * 下载方法:
53 * 1.将开发版正常连接好
54 * 2.按住复位按键,点击下载瞬间松开复位按键
55 *
56 * 1.通过跳线帽将 BOOT 0 接高电平(3.3V)
57 * 2.重新上电,下载
58 *
59 * 1.使用FlyMcu擦除一下芯片,然后进行下载
60 * STMISP -> 清除芯片(z)
61 */
62#define configUSE_TICKLESS_IDLE 0
63
64/*
65 * 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk
66 * Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,
67 * 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;
68 */
69#define configCPU_CLOCK_HZ (SystemCoreClock)
70
71//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
72#define configTICK_RATE_HZ (( TickType_t )1000)
73
74//可使用的最大优先级
75#define configMAX_PRIORITIES (32)
76
77//空闲任务使用的堆栈大小
78#define configMINIMAL_STACK_SIZE ((unsigned short)128)
79
80//任务名字字符串长度
81#define configMAX_TASK_NAME_LEN (16)
82
83 //系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
84#define configUSE_16_BIT_TICKS 0
85
86//空闲任务放弃CPU使用权给其他同优先级的用户任务
87#define configIDLE_SHOULD_YIELD 1
88
89//启用队列
90#define configUSE_QUEUE_SETS 1
91
92//开启任务通知功能,默认开启
93#define configUSE_TASK_NOTIFICATIONS 1
94
95//使用互斥信号量
96#define configUSE_MUTEXES 1
97
98//使用递归互斥信号量
99#define configUSE_RECURSIVE_MUTEXES 1
100
101//为1时使用计数信号量
102#define configUSE_COUNTING_SEMAPHORES 1
103
104/* 设置可以注册的信号量和消息队列个数 */
105#define configQUEUE_REGISTRY_SIZE 10
106
107#define configUSE_APPLICATION_TASK_TAG 0
108
109
110/*****************************************************************
111 FreeRTOS与内存申请有关配置选项
112*****************************************************************/
113//支持动态内存申请
114#define configSUPPORT_DYNAMIC_ALLOCATION 1
115//支持静态内存
116#define configSUPPORT_STATIC_ALLOCATION 0
117//系统所有总的堆大小
118#define configTOTAL_HEAP_SIZE ((size_t)(36*1024))
119
120
121/***************************************************************
122 FreeRTOS与钩子函数有关的配置选项
123**************************************************************/
124/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子
125 *
126 * 空闲任务钩子是一个函数,这个函数由用户来实现,
127 * FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),
128 * 这个函数在每个空闲任务周期都会被调用
129 * 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。
130 * 因此必须保证空闲任务可以被CPU执行
131 * 使用空闲钩子函数设置CPU进入省电模式是很常见的
132 * 不可以调用会引起空闲任务阻塞的API函数
133 */
134#define configUSE_IDLE_HOOK 0
135
136/* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子
137 *
138 *
139 * 时间片钩子是一个函数,这个函数由用户来实现,
140 * FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )
141 * 时间片中断可以周期性的调用
142 * 函数必须非常短小,不能大量使用堆栈,
143 * 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数
144 */
145 /*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
146#define configUSE_TICK_HOOK 0
147
148//使用内存申请失败钩子函数
149#define configUSE_MALLOC_FAILED_HOOK 0
150
151/*
152 * 大于0时启用堆栈溢出检测功能,如果使用此功能
153 * 用户必须提供一个栈溢出钩子函数,如果使用的话
154 * 此值可以为1或者2,因为有两种栈溢出检测方法 */
155#define configCHECK_FOR_STACK_OVERFLOW 0
156
157
158/********************************************************************
159 FreeRTOS与运行时间和任务状态收集有关的配置选项
160**********************************************************************/
161//启用运行时间统计功能
162#define configGENERATE_RUN_TIME_STATS 0
163 //启用可视化跟踪调试
164#define configUSE_TRACE_FACILITY 0
165/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
166 * prvWriteNameToBuffer()
167 * vTaskList(),
168 * vTaskGetRunTimeStats()
169*/
170#define configUSE_STATS_FORMATTING_FUNCTIONS 1
171
172
173/********************************************************************
174 FreeRTOS与协程有关的配置选项
175*********************************************************************/
176//启用协程,启用协程以后必须添加文件croutine.c
177#define configUSE_CO_ROUTINES 0
178//协程的有效优先级数目
179#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
180
181
182/***********************************************************************
183 FreeRTOS与软件定时器有关的配置选项
184**********************************************************************/
185 //启用软件定时器
186#define configUSE_TIMERS 1
187//软件定时器优先级
188#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
189//软件定时器队列长度
190#define configTIMER_QUEUE_LENGTH 10
191//软件定时器任务堆栈大小
192#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
193
194/************************************************************
195 FreeRTOS可选函数配置选项
196************************************************************/
197#define INCLUDE_xTaskGetSchedulerState 1
198#define INCLUDE_vTaskPrioritySet 1
199#define INCLUDE_uxTaskPriorityGet 1
200#define INCLUDE_vTaskDelete 1
201#define INCLUDE_vTaskCleanUpResources 1
202#define INCLUDE_vTaskSuspend 1
203#define INCLUDE_vTaskDelayUntil 1
204#define INCLUDE_vTaskDelay 1
205#define INCLUDE_eTaskGetState 1
206#define INCLUDE_xTimerPendFunctionCall 1
207//#define INCLUDE_xTaskGetCurrentTaskHandle 1
208//#define INCLUDE_uxTaskGetStackHighWaterMark 0
209//#define INCLUDE_xTaskGetIdleTaskHandle 0
210
211
212/******************************************************************
213 FreeRTOS与中断有关的配置选项
214******************************************************************/
215#ifdef __NVIC_PRIO_BITS
216 #define configPRIO_BITS __NVIC_PRIO_BITS
217#else
218 #define configPRIO_BITS 4
219#endif
220//中断最低优先级
221#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
222
223//系统可管理的最高中断优先级
224#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
225
226#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */
227
228#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
229
230
231/****************************************************************
232 FreeRTOS与中断服务函数有关的配置选项
233****************************************************************/
234#define xPortPendSVHandler PendSV_Handler
235#define vPortSVCHandler SVC_Handler
236
237
238/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
239#if ( configUSE_TRACE_FACILITY == 1 )
240#include "trcRecorder.h"
241#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
242#endif
243
244
245#endif /* FREERTOS_CONFIG_H */
修改stm32f10x_it.c
SysTick中断服务函数是一个非常重要的函数,FreeRTOS所有跟时间相关的事情都在里面处理,SysTick就是FreeRTOS的一个心跳时钟,驱动着FreeRTOS的运行,就像人的心跳一样,假如没有心跳,我们就相当于“死了”,同样的,FreeRTOS没有了心跳,那么它就会卡死在某个地方,不能进行任务调度,不能运行任何的东西,因此我们需要实现一个FreeRTOS的心跳时钟,FreeRTOS帮我们实现了SysTick的启动的配置:在port.c文件中已经实现vPortSetupTimerInterrupt()函数,并且FreeRTOS通用的SysTick中断服务函数也实现了:在port.c文件中已经实现xPortSysTickHandler()函数,所以移植的时候只需要我们在stm32f10x_it.c文件中实现我们对应(STM32)平台上的SysTick_Handler()函数即可。FreeRTOS为开发者考虑得特别多,PendSV_Handler()与SVC_Handler()这两个很重要的函数都帮我们实现了,在在port.c文件中已经实现xPortPendSVHandler()与vPortSVCHandler()函数,防止我们自己实现不了,那么在stm32f10x_it.c中就需要我们注释掉PendSV_Handler()与SVC_Handler()这两个函数了。
1//void SVC_Handler(void)
2//{
3//}
4
5//void PendSV_Handler(void)
6//{
7//}
8
9extern void xPortSysTickHandler(void);
10
11//systick中断服务函数
12void SysTick_Handler(void)
13{
14 #if (INCLUDE_xTaskGetSchedulerState == 1 )
15 if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
16 {
17 #endif /* INCLUDE_xTaskGetSchedulerState */
18 xPortSysTickHandler();
19 #if (INCLUDE_xTaskGetSchedulerState == 1 )
20 }
21 #endif /* INCLUDE_xTaskGetSchedulerState */
22}
创建任务
这里,我们创建一个单任务,任务使用的栈和任务控制块是在创建任务的时候FreeRTOS动态分配的。
任务必须是一个死循环,否则任务将通过LR返回,如果LR指向了非法的内存就会产生HardFault_Handler,而FreeRTOS指向一个死循环,那么任务返回之后就在死循环中执行,这样子的任务是不安全的,所以避免这种情况,任务一般都是死循环并且无返回值的。
并且每个任务循环主体中应该有阻塞任务的函数,否则就会饿死比它优先级更低的任务!!!
1/* FreeRTOS头文件 */
2#include "FreeRTOS.h"
3#include "task.h"
4/* 开发板硬件bsp头文件 */
5#include "bsp_led.h"
6
7static void AppTaskCreate(void);/* AppTask任务 */
8
9 /* 创建任务句柄 */
10static TaskHandle_t AppTask_Handle = NULL;
11
12int main(void)
13{
14 BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
15
16 /* 开发板硬件初始化 */
17 BSP_Init();
18
19 /* 创建AppTaskCreate任务 */
20 xReturn = xTaskCreate((TaskFunction_t )AppTask, /* 任务入口函数 */
21 (const char* )"AppTask",/* 任务名字 */
22 (uint16_t )512, /* 任务栈大小 */
23 (void* )NULL,/* 任务入口函数参数 */
24 (UBaseType_t )1, /* 任务的优先级 */
25 (TaskHandle_t* )&AppTask_Handle);/* 任务控制块指针 */
26 /* 启动任务调度 */
27 if(pdPASS == xReturn)
28 vTaskStartScheduler(); /* 启动任务,开启调度 */
29 else
30 return -1;
31
32 while(1); /* 正常不会执行到这里 */
33}
34
35static void AppTask(void* parameter)
36{
37 while (1)
38 {
39 LED1_ON;
40 vTaskDelay(500); /* 延时500个tick */
41 LED1_OFF;
42 vTaskDelay(500); /* 延时500个tick */
43 }
44}
-
源代码
+关注
关注
96文章
2949浏览量
67703 -
FreeRTOS
+关注
关注
12文章
485浏览量
63599 -
Source
+关注
关注
0文章
17浏览量
10036
发布评论请先 登录
ministm32板子如何用freertos移植
把FreeRTOS移植到STM32F407上
FreeRTOS移植加测试的相关资料推荐
如何将FreeRTOS移植到stm32上呢
FreeRTOS移植MAPS-K22开发板
FreeRTOS移植MAPS-K22开发板-工程源码
FreeRTOS移植到MAPS-资料汇总
FreeRTOS的移植教程说明
【STM32】FreeRTOS移植


瑞萨RA8系列教程 | 基于 RASC 生成 Keil 工程
对于不习惯用 e2 studio 进行开发的同学,可以借助 RASC 生成 Keil 工程,然后在 Keil 环境下愉快的完成开发任务。

共赴之约 | 第二十七届中国北京国际科技产业博览会圆满落幕
作为第二十七届北京科博会的参展方,芯佰微有幸与800余家全球科技同仁共赴「科技引领创享未来」之约!文章来源:北京贸促5月11日下午,第二十七届中国北京国际科技产业博览会圆满落幕。本届北京科博会主题为“科技引领创享未来”,由北京市人民政府主办,北京市贸促会,北京市科委、中关村管委会,北京市经济和信息化局,北京市知识产权局和北辰集团共同承办。5万平方米的展览云集

道生物联与巍泰技术联合发布 RTK 无线定位系统:TurMass™ 技术与厘米级高精度定位的深度融合
道生物联与巍泰技术联合推出全新一代 RTK 无线定位系统——WTS-100(V3.0 RTK)。该系统以巍泰技术自主研发的 RTK(实时动态载波相位差分)高精度定位技术为核心,深度融合道生物联国产新兴窄带高并发 TurMass™ 无线通信技术,为室外大规模定位场景提供厘米级高精度、广覆盖、高并发、低功耗、低成本的一站式解决方案,助力行业智能化升级。

智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
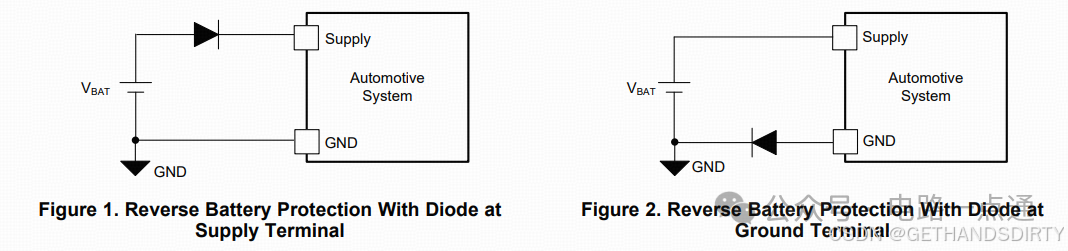
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
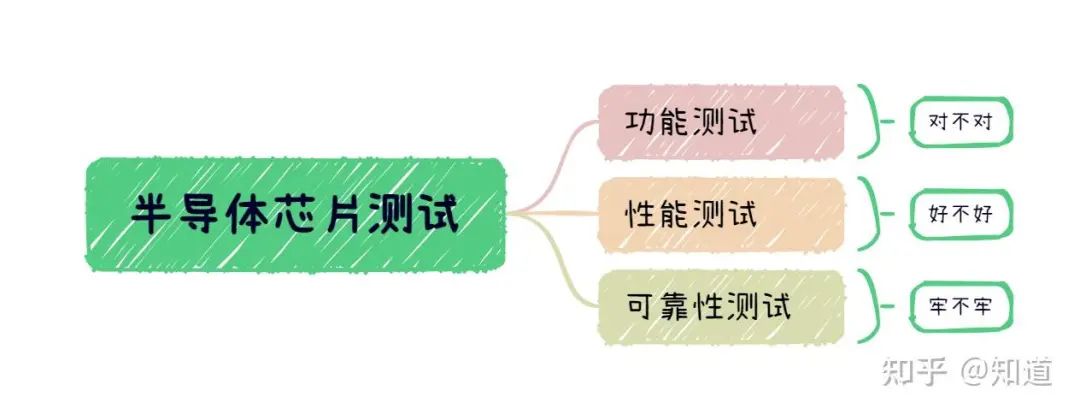
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
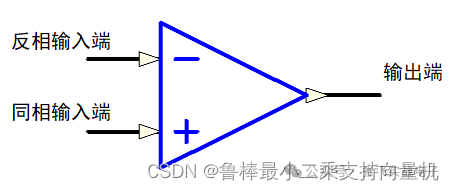
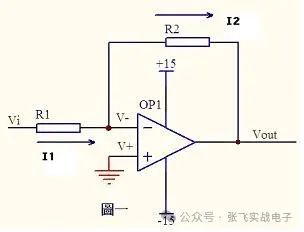
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
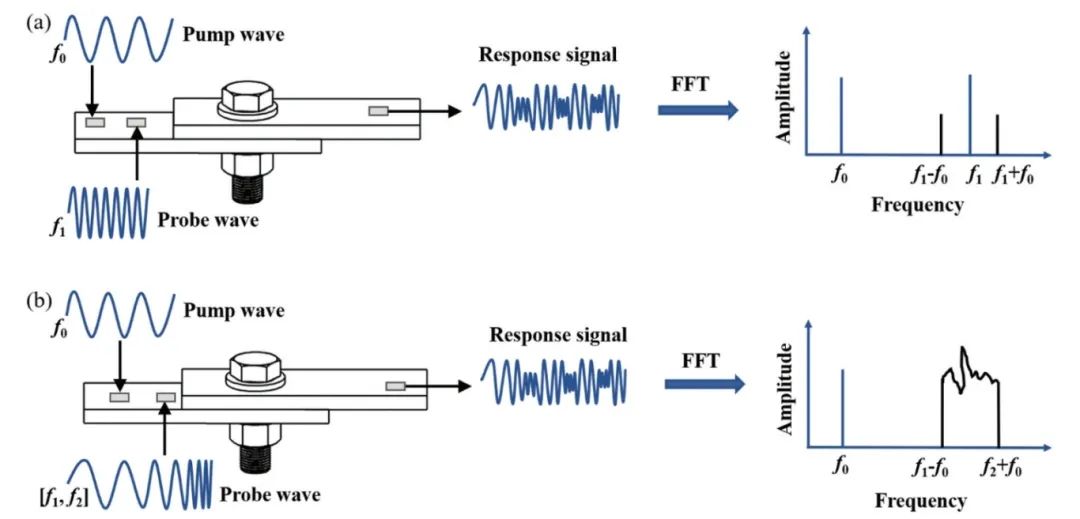
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
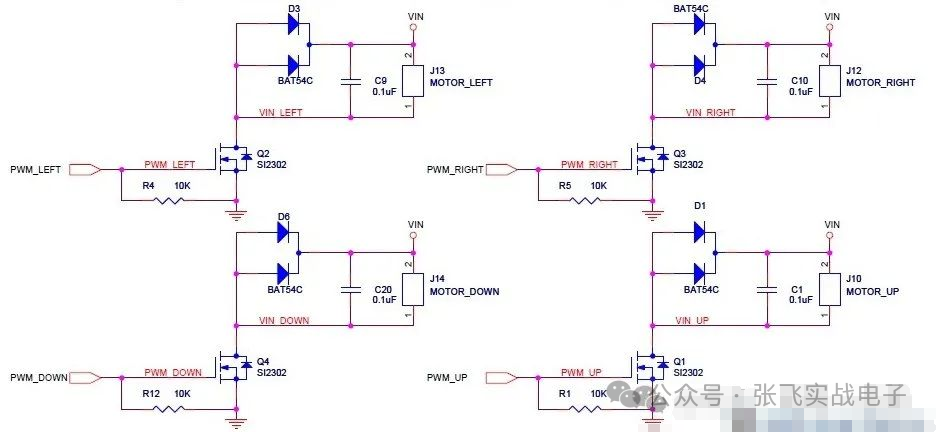
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存





 工商网监
工商网监
评论