 使用超高速闪存微控制器实现快速内存传输
使用超高速闪存微控制器实现快速内存传输
达拉斯半导体超高速闪存微控制器具有双数据指针,具有自动递增/递减和切换选择功能。本应用笔记将采用一个数据指针的原始8051架构与DS89C430和DS89C450的新架构及其更高的数据移动效率进行了比较。本文提供了大量代码示例,以帮助理解该超高速微控制器的双数据指针的使用。
概述
嵌入式系统设计人员和程序员一直在寻找巧妙的方法来突破其 8051 微控制器设计的性能极限。如果您的应用受到微控制器复制外部数据存储器缓冲器或读/写存储器映射外设的速率的限制,则可能会受益于使用更多片上硬件和更少软件的方案。本应用笔记介绍了使用定时器/计数器作为终止固定长度复制例程的方法。将这种方法与达拉斯的超高速 8051 架构及其数据指针增强功能结合使用,可以以超过 2MBps 的速率复制数据,比以相同时钟频率运行并配备单个数据指针的标准 20 内核快 8051 倍以上。
XDATA 复制例程 - 原始 8051
最初的8051架构仅包含一个数据指针(DPTR = DPH + DPL),但提供了两种间接访问外部数据存储器的不同方式。MOVX指令可以使用16位数据指针(例如,MOVX @DPTR,A)或8位工作寄存器(例如,MOVX @R0,A)来访问MOVX数据空间。请注意,后一条指令使用 8 位寄存器指针,因此要求在执行指令之前使用指针的最高有效地址字节写入端口 2。只有一个数据指针,在复制超过 256 字节的数据时管理源指针和目标指针需要大量使用工作寄存器进行临时存储。下面是使用单个数据指针复制数据时通常执行的代码示例。
; Original 8051 Copy - Single DPTR ; R6:R7 control copy length ; R4:R0 used for source/dest DPTR hi/lo temp storage loop: ; Cycle Count @ 12clks/cycle movx a,@dptr ; 2 inc dptr ; 2 xch a,r0 ; 1 xch a,dpl ; 1 xch a,r0 ; 1 xch a,r4 ; 1 xch a,dph ; 1 xch a,r4 ; 1 movx @dptr,a ; 2 inc dptr ; 2 xch a,r0 ; 1 xch a,dpl ; 1 xch a,r0 ; 1 xch a,r4 ; 1 xch a,dph ; 1 xch a,r4 ; 1 djnz r7,loop ; 2 => 22cycles * length djnz r6,loop ; 2 => 2cycles * (1 + (length/256))
XDATA 复制例程-超高速微控制器
超高速微控制器包含两个数据指针(DPTR = DPH + DPL;DPTR1 = DPH1 + DPL1),允许单独的源和目标数据指针。此外,它还实现了硬件控件,以在数据指针之间自动切换,并自动递增或递减活动数据指针,以响应某些与 DPTR 相关的指令。有关增强型双数据指针的完整详细信息,请参阅超高速微控制器用户指南。下面的代码演示了增强的双数据指针如何简化复制例程。自动切换活动数据指针的指令标有 [T],自动前进数据指针的指令标有 [+/-]。为了与原始8051架构进行比较,假设了标准的8051外部P2,P0存储器总线结构,从而给出了5个时钟周期的最小MOVX持续时间(1个时钟周期用于MOVX操作码提取,4个时钟周期用于数据存储器访问)。虽然页面模式 1 外部总线配置的周期计数未反映在下面的代码示例中,但应该注意的是,页面模式 1 确实提供了绝对的最小外部 MOVX 持续时间(3 个时钟周期 = MOVX 操作码提取的 1 个时钟周期 + 数据存储器访问的 2 个时钟周期)。
; Ultra High-Speed Micro Copy - Enhanced Dual DPTRs ; DPS.4 (AID) = 1; DPS.5 (TSL) = 1; ; R6:R7 control copy length loop: ; Cycle Count @ 1clk/cycle movx a,@dptr ; 5 [T][+/-] movx @dptr,a ; 5 [T][+/-] djnz r7,loop ; 5 => 15 cycles * length djnz r6,loop ; 5 => 5 cycles * (1 +(length/256))
XDATA 复制例程 - 使用计时器/计数器
若要使用计时器/计数器,应用程序必须在复制例程期间提供计时器/计数器及其关联的输入引脚。基本思想是使用片内计数器来跟踪和终止复制环路,而不是使用工作寄存器。/WR选通用作计数器的输入信号。图 1 显示了一个硬件配置示例。
图1.低电平有效WR选通计数的硬件图。
所有超高速微控制器定时器/计数器输入引脚(T0、T1、T2)都能够对相当于系统时钟频率四分之一的输入频率进行采样。这意味着要采样的输入信号必须具有最小高电平和低电平时间,每个周期为2个系统时钟周期。除了 1 周期或 2 周期寻呼模式 1 中最快的 MOVX 外,/WR 选通器还满足所有其他外部 MOVX 操作的此标准。在进入复制循环之前,16 位计数器加载适当的值 (216- #bytes复制),定时器/计数器中断被启用,并且增强的数据指针配置为最快速的复制。复制的最后一个字节会导致计数器翻转并生成计时器中断,从而允许将代码执行返回到主程序。
使用定时器/计数器方法的好处
使用计时器/计数器的主要好处是提高了性能,同时允许更宽容的 xdata 访问时间。已经注意到,最快的复制循环执行时间是通过将外部总线结构配置为寻呼模式 1(端口 2 = 多路复用地址 MSB/LSB 和端口 0 = 数据)来实现的。尽管页面模式 1 提供了终极性能,但它也需要最快的 xdata 访问时间 (tRLDV < 中联).计时器/计数器方法提供几乎相同的性能,同时使最大 xdata 访问时间几乎翻倍。
此外,预计并非所有超高速微控制器设计都将使用新的总线结构。一些系统设计人员可能希望保留传统的8051总线接口,甚至可能将超高速微控制器放入现有插座中。在这些情况下,计数器端接复制环路提供了高性能折衷方案。
由于定时器/计数器端接复制环路依赖于内部 16 位定时器硬件来计算外部读/写事件的数量,因此不需要单独的 DJNZ 指令来跟踪 16 位环路控制变量。这允许应用程序对大于 256 字节的数据长度执行高速同步传输。
表1比较了原始8051架构的复制环路与三种可能的超高速微控制器配置。计数器终止的复制循环已突出显示。下表是计时器/计数器终止副本的示例代码清单。代码中突出显示了复制循环,以便与前两个示例进行比较。
| 微控制器选项 | 持续时间(毫秒)(1kbyte xdata copy-loop, sysclk=25MHz) | 快速的 XDATA 访问时间 (tRLDV)3 | 同步传输? | 使用的特殊功能 |
| 超高速微控制器1 | 0.441 | < 1 x tCLCL | 不 | 页面模式 1 总线结构 |
| 超高速微控制器1 | 0.480 | < 2 x tCLC | 是的 | 定时器/计数器和定时器输入引脚 |
| 超高速微控制器1 | 0.601 | < 2 x tCLC | 不 | - |
| 标准 80512 | 10.568 | < 5 x tCLC | 不 | - |
|
1机器周期 = 1 x t中联;增强型双数据指针,具有自动 Inc/Dec、自动切换功能 2机器周期 = 12 x t中联;单个数据指针 3参考单个器件数据表的精确数据RLDV最大值。 |
||||
计数器终止复制方法(代码示例)
;------------------------------------------------------------ ; Demonstrate use of Timer/Counter 1 to terminate copy loop ; Use P3.6 (Active-Low WR) as an input to Timer/Counter 1 (P3.5) ; In this example: ; 1) Source, dest, and length defined as constants. ; 2) Code saves only DPTR0 state under the assumption that a ; single DPTR is normally used and that the second (DPTR1) ; is enabled only for certain routines (such as this one). ; 3) Code disables all other interrupts during the copy. ; 4) External non-overlapping xdata to xdata transfer ;------------------------------------------------------------ $include(420.def) ; include file w/SFRs source equ 0100h ; source xdata address dest equ 0200h ; dest xdata address length equ 256d ; #bytes to copy ;------------------------------------------------------------ org 0h ljmp 0100h ;------------------------------------------------------------ ;Timer/Counter 1 interrupt ;------------------------------------------------------------ org 1bh clr tr1 ; disable timer/counter 1 pop acc ; pop 'ajmp' loop addr pop acc ; from the stack pop dps ; return pre-transfer pop dph ; DPTR state pop dpl pop ie ; return interrupt config pop eie reti ; back to instruction ; after "xmemcpy_.." call ;------------------------------------------------------------ ; Main ;------------------------------------------------------------ org 0100h orl tmod, #50h ; 16-bit counter anl ckcon, #0F8h ; fast 2-cycle MOVX call xmemcpy_count ; call xdata copy code sjmp $ ;------------------------------------------------------------ ; 1) Save interrupt enable registers, make only T/C#1 enabled ; 2) Save DPTR0 ; 3) Timer/Counter 1 loaded with (2^16-#bytes to copy) ; 4) Configure source/destination pointers ; 5) Execute copy loop ; - last write rolls the Counter ; - Timer/Counter 1 Interrupt breaks the loop ;------------------------------------------------------------ xmemcpy_count: push eie push ie mov eie, #00h ; disable other ints mov ie, #88h ; EA=1, ET1=1 push dpl ;save DPTR state push dph push dps mov th1, #high(-length) ; copy length mov tl1, #low(-length) setb tr1 ; enable Timer1 orl dps, #30h ; SEL=0,TSL=1, AID=1 mov dptr, #source ; DPTR0 = source addr mov dptr, #dest ; DTPR1 = dest addr transfer: movx a, @dptr ;[5] read from @DPTR0 movx @dptr, a ;[5] write to @DPTR1 ajmp transfer ;[2] in loop etil int ; ---- ; [12] total end
使用内部 XRAM 实现更高的传输速率
使用定时器/计数器提高执行效率的基本原理不仅适用于外部数据复制例程,还可用于外部数据读取或写入内部数据存储器。例如,如果应用要求从外部存储器(或从并行外设)读取或写入不超过1024字节,则可以使用DS1C89/430的内部450kB数据存储器进一步提高传输速率。
由于内部MOVX操作只需要2个周期,因此读/写传输环路(到目前为止一直是讨论的主题)可以减少到9个周期,有效传输速率为3.67MBps(@33MHz),并且仅占用4B的代码空间(下面的代码)。请记住,两个MOVX操作之一,无论是读取还是写入,都必须在外部存储器上执行,以便/RD或/WR选通递递增加定时器/计数器,最终终止传输环路。下面的第一个代码示例给出了对应于外部 MOVX 写入的周期计数,第二个示例显示了外部 MOVX 读取。另请注意,当计数/RD信号时,计数器应初始化为[216- (#bytes复制 +1)],以便在循环中断之前进行最终的字节写入。
loop: ; Ultra High-Speed Microcontroller User's Guide Cycle Count / Byte Count movx a,@dptr ; 2 (internal MOVX) / 1 movx @dptr,a ; 5 (external MOVX) / 1 ajmp loop ; 2 / 2 ; 9 cycles / 4 bytes -- OR -- loop: ; Ultra High-Speed Microcontroller User's Guide Cycle Count / Byte Count movx a,@dptr ; 5 (external MOVX) / 1 movx @dptr,a ; 2 (internal MOVX) / 1 ajmp loop ; 2 / 2 ; 9 cycles / 4 bytes
审核编辑:郭婷
-
微控制器
+关注
关注
48文章
7869浏览量
153442 -
计数器
+关注
关注
32文章
2283浏览量
95882 -
定时器
+关注
关注
23文章
3273浏览量
116851
发布评论请先 登录
MAX32555 Cortex-M3闪存微控制器英文数据手册
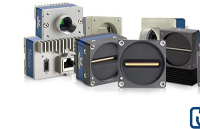
超高速工业相机的应用
FPGA 与微控制器优缺点比较
RM42L432 16/32位RISC闪存微控制器数据表

TMS570LS1115 16位和32位RISC闪存微控制器数据表
TMS570LS1114 16位和32位RISC闪存微控制器数据表
超高速直线模组究竟有多快?飞创直线模组最快速度是多少?

超高速电机的气隙为什么较大?
如何通过Miniwiggler V3将labview程序闪存到微控制器?
为什么无法通过modus ide恢复和闪存微控制器?

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
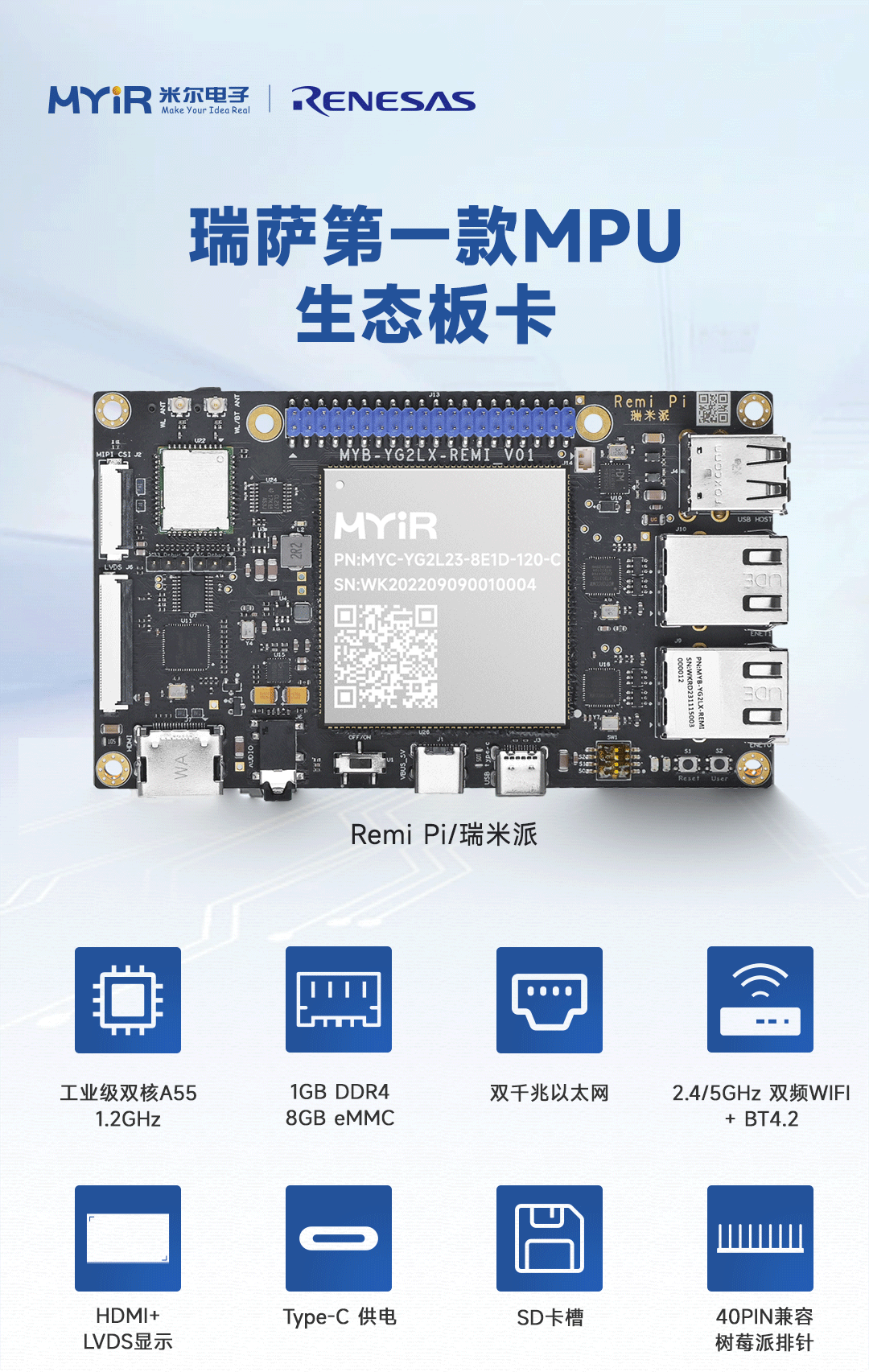
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
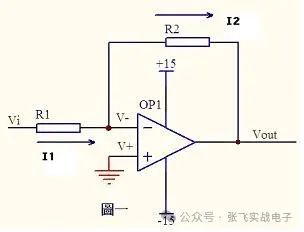
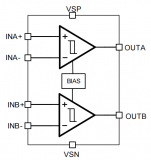
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
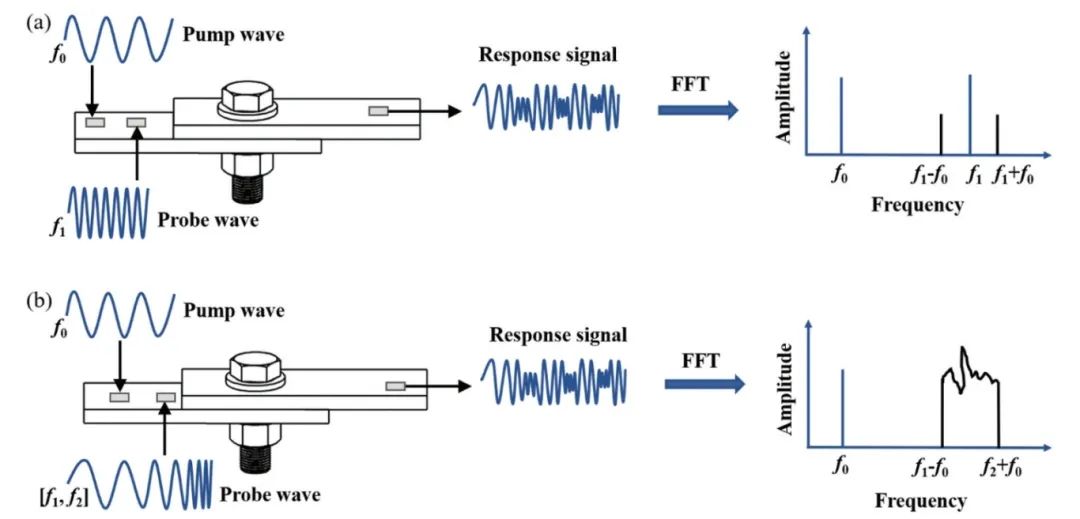
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
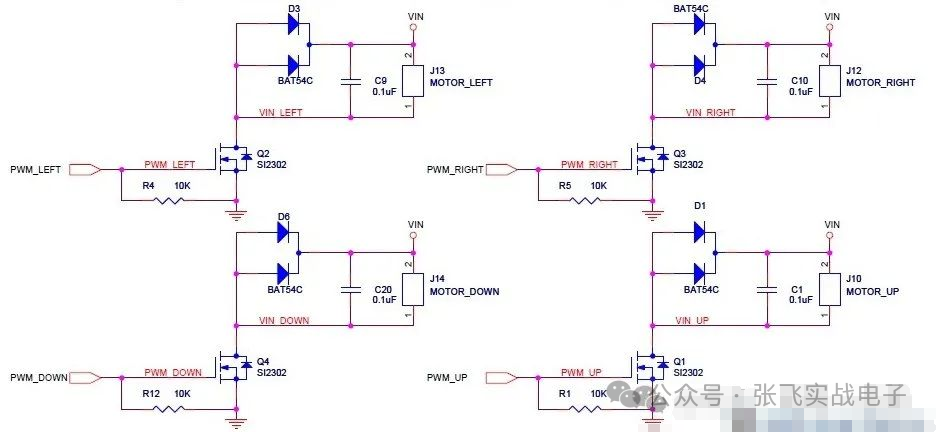
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
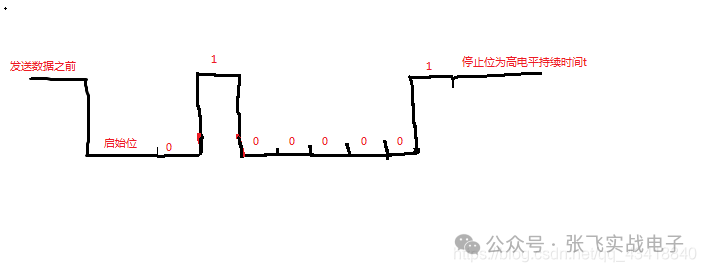
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。

干簧继电器在RF信号衰减中的应用与优势
在电子测试领域,RF(射频)评估是不可或缺的一部分。无论是研发阶段的性能测试,还是生产环节的质量检测,RF测试设备都扮演着关键角色。然而,要实现精准的RF评估,测试设备需要一种特殊的电路——衰减电路。这些电路的作用是调整RF信号的强度,以便测试设备能够准确地评估RF组件和RF电路的各个方面。衰减器的挑战衰减器的核心功能是校准RF信号的强度。为了实现这一点,衰

ElfBoard嵌入式教育科普|ADC接口全面解析
当代信息技术体系中,嵌入式系统接口作为数据交互的核心基础设施,构成了设备互联的神经中枢。基于标准化通信协议与接口规范的技术架构,实现了异构设备间的高效数据交换与智能化协同作业。本文选取模数转换接口ADC作为技术解析切入点,通过系统阐释其工作机理、性能特征及重要参数,为嵌入式学习者爱好者构建全维度接口技术认知框架。
深入理解C语言:C语言循环控制
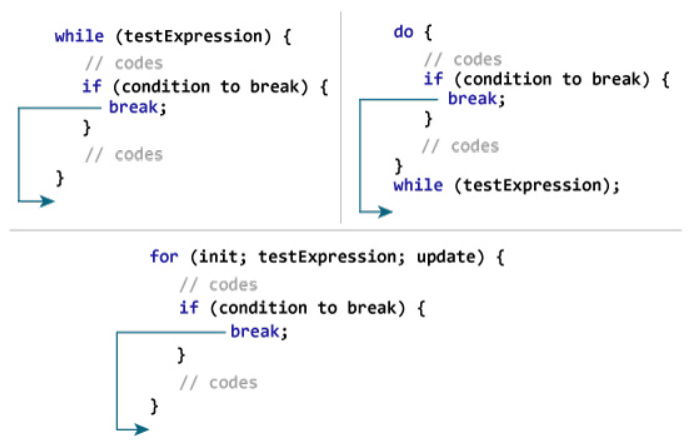
在C语言编程中,循环结构是至关重要的,它可以让程序重复执行特定的代码块,从而提高编程效率。然而,为了避免程序进入无限循环,C语言提供了多种循环控制语句,如break、continue和goto,用于改变程序的执行流程,使代码更加灵活和可控。本文将详细介绍这些语句的作用及其应用场景,并通过示例代码进行说明。Part.1break语句C语言中break语句有两种

第 21 届(顺德)家电电源与智能控制技术研讨会圆满落幕--其利天下斩获颇丰
2025年4月25日,其利天下应大比特之邀出席第21届(顺德)家电电源与智能控制技术研讨会,已圆满落幕。一、演讲回顾我司研发总监冯建武先生在研讨会上发表了主题为《重新定义风扇驱动:一套算法兼容百种电机的有效磁链观测器方案》的演讲,介绍了我司研发自适应技术算法(简称),该方案搭载有效磁链观测器,适配百种电机类型,结合FOC算法可实现免调参稳定启动、低速静音控制

来自资深工程师对ELF 2开发板的产品测评
来自资深工程师对ELF 2开发板的使用测评





 工商网监
工商网监
评论