 AN-1057:使用加速度计进行倾角检测
AN-1057:使用加速度计进行倾角检测
Christopher J. Fisher
确定系统倾斜或倾斜的一种常用方法是对陀螺仪的输出进行积分。虽然这种方法很简单,但随着积分周期的增加,与零偏置稳定性相关的误差会迅速加剧,即使在器件静止时也会导致明显的旋转。
在某些应用中,系统随时间推移的净加速度或力是重力,加速度计可用于测量倾斜或倾斜的静态角度。此类应用包括游戏、数码相机中的水平检测以及工业和医疗应用中的设备航向检测。
使用加速度计进行倾角感应的基本假设是,唯一的加速度刺激是与重力相关的加速度刺激。实际上,可以对信号输出进行信号处理,以去除输出信号中的高频成分,因此可以容忍一些交流加速度。
倾角传感使用重力矢量及其在加速度计轴上的投影来确定倾斜角度。由于重力是直流加速度,因此任何导致额外直流加速度的力都会损坏输出信号并导致计算错误。直流加速度的来源包括车辆以恒定速率加速的时间段和在加速度计上引起向心加速度的旋转装置。此外,通过重力旋转加速度计会导致明显的交流加速度,因为重力在感兴趣轴上的投影会发生变化。在计算倾角之前对加速度信号进行任何滤波都会影响输出稳定到新静态值的速度。
本应用笔记讨论了将加速度计输出转换为倾斜角的基本原理。本讨论包括如何计算单轴、双轴或三轴解决方案的理想倾角。此外,还包括一些有关校准的基本信息,以减少失调和灵敏度不匹配造成的误差。
倾斜/倾斜计算
单轴倾斜计算
在只需要在有限角度和分辨率略显粗糙的范围内进行倾角检测的应用中,可以使用单轴设备(或多轴设备的单轴)。
例如,在图 1 中,单个轴(本例中的 x 轴)通过重力旋转。由于此方法仅使用单个轴并且需要重力矢量,因此仅当设备的方向使x轴始终位于重力平面中时,计算的倾斜角度才是准确的。围绕其他轴的任何旋转都会减小 x 轴上的加速度大小,并导致计算的倾斜角出现误差。
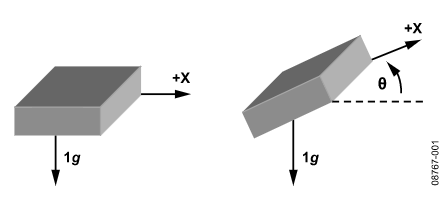
图1.用于倾斜传感的单轴。
参考基本三角函数,重力矢量在 x 轴上的投影产生的输出加速度等于加速度计 x 轴与地平线之间角度的正弦。地平线通常被视为与重力矢量正交的平面。对于重力的理想值为 1 g,输出加速度为

使用单轴解决方案时,请注意,倾角计算的灵敏度(即输入中某些变化的输出变化)随着地平线和 x 轴之间的角度增加而降低,当角度接近 ±0° 时接近 90。这可以从图2中看到,其中输出加速度(以g为单位)与倾斜角的关系图。接近±90°时,倾斜角度的较大变化会导致输出加速度的微小变化。
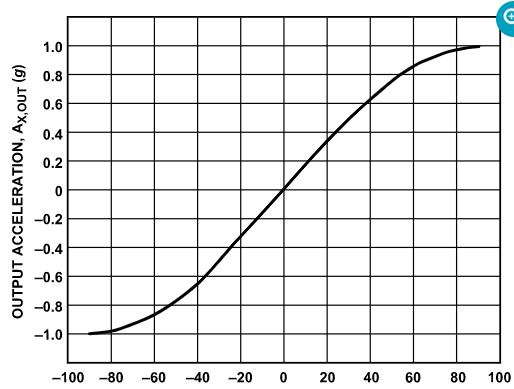
图2.单轴倾角检测的输出加速度与倾斜角度的关系。
由于倾角计算是以数字方式完成的,因此输出加速度表示为每最低有效位(LSB)或代码的恒定加速度,该加速度可从模数转换器(ADC)或直接从数字输出部分获得。由于输出分辨率是恒定加速度,因此以倾斜度为单位的分辨率是可变的,最佳分辨率接近 0°,最差分辨率为 ±90°。
图3和图4显示了1°和0.25°倾斜角步长的增量灵敏度。增量灵敏度是输出变化,以mg表示,每个倾斜角度步长,或

其中:
N 是当前角度。
P 是步长。
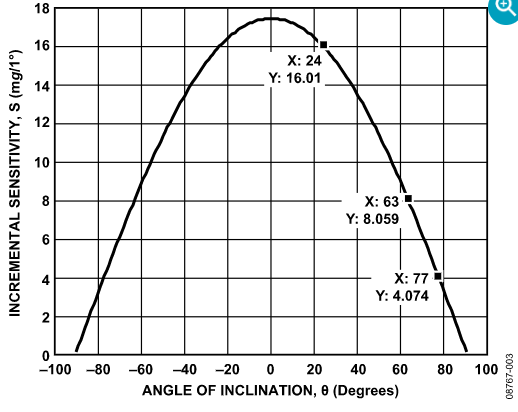
图3.1° 步长的增量倾斜灵敏度。
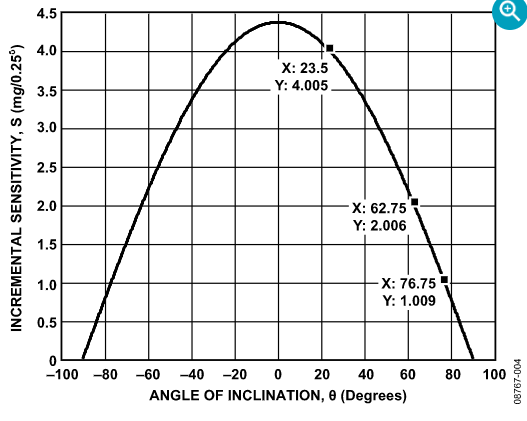
图4.0.25°步长的增量倾斜灵敏度。
这些曲线可用于在测量输出加速度时确定所需的最小分辨率,以满足整个应用范围内所需的倾斜分辨率。例如,设计的最大步长为 1°,对于 ±8° 的范围,至少需要 63 mg/LSB 的分辨率。同样,要在 ±0 范围内实现 25.63° 的最大步长,需要至少 2 mg/LSB 的分辨率。请注意,如果存在足够的抖动,则可以使用过采样来实现更好的分辨率。
由于加速度计的输出在重力旋转时遵循正弦关系,因此使用反正弦函数完成从加速度到角度的转换。
其中倾角 θ 以弧度为单位。
如果需要较窄的倾斜范围,可以使用线性近似代替反正弦函数。线性近似与小角度的正弦近似有关。

其中倾角 θ 以弧度为单位。
倾斜角的线性近似中可以包含一个额外的比例因子 k,如果允许误差增加,则允许增加近似的有效范围。
其中倾角 θ 以弧度为单位。
度数的转换是通过将公式 5 的结果乘以 (180/π) 来完成的。图 5 显示了使用正弦反函数和 k 等于 1 的线性近似之间的比较。随着倾角大小的增加,线性近似开始失效,计算的角度偏离实际角度。
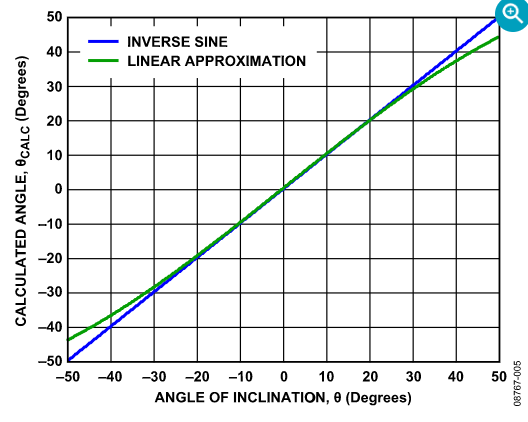
图5.用于倾角计算的正弦反函数和线性近似的比较.
由于计算的角度与实际倾斜角作图,因此线性近似值似乎在末端附近弯曲。这是因为线性近似值仅在与输出加速度相比时才是线性的,如图2所示,输出加速度的行为与实际倾斜角度的增加相似。但是,反正弦函数应产生与实际倾斜角一对一的输出,导致计算的角度在与实际倾斜角绘制时为直线。
例如,如果倾斜感测的所需分辨率为1°,则±0.5°的误差是可以接受的,因为它低于计算的舍入误差。如果绘制实际倾角与计算的倾角之间的误差,k等于1,如图6所示,则线性近似的有效范围仅为±20°。如果调整比例因子以使误差最大化,但保持在计算舍入限制内,则线性近似的有效范围将增加到大于 ±30°。
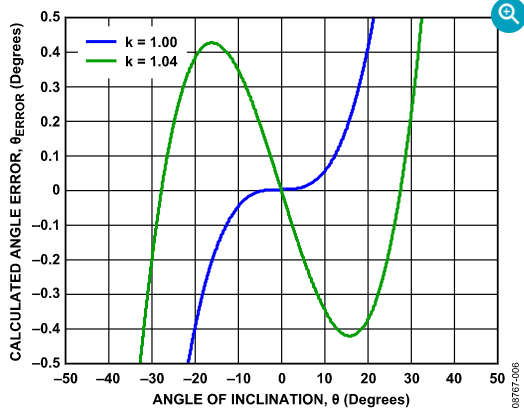
图6.计算不同比例因子的角度误差。
双轴倾斜计算
单轴倾角检测的一个限制是需要高分辨率ADC或数字输出来实现大范围的有效倾角,如图3和图4所示。另一个限制是单轴测量无法提供 360° 测量,因为在 N° 倾角处产生的加速度与在 180° − N° 倾角处产生的加速度相同。对于某些应用,这是可以接受的,但对于需要更高分辨率或能够区分完整360°弧的倾斜角度的应用,需要第二个轴(如图7所示)或第二个传感器。如果使用第二个传感器,则应使其方向应使第二个传感器的传感轴与第一个传感器的传感轴正交。
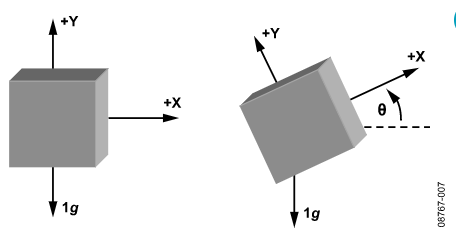
图7.用于倾斜传感的两个轴。
在确定倾斜角度时包括第二个轴有三个主要好处。以下各节将介绍这些好处。
恒定灵敏度
使用第二个轴的第一个主要好处是由于轴的正交性。与单轴解决方案一样,x 轴检测到的加速度与倾斜角的正弦成正比。由于正交性,y轴加速度与倾角的余弦成正比(见图8)。当一个轴的增量灵敏度降低时,例如当该轴上的加速度接近 +1 g 或 −1 g 时,另一个轴的增量灵敏度会增加。
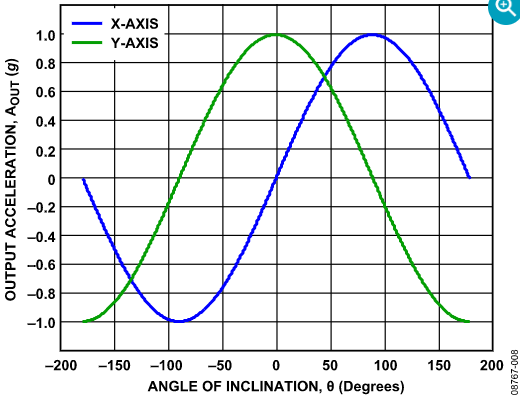
图8.双轴倾角检测的输出加速度与倾角的关系。
将测量的加速度转换为倾角的一种方法是计算 x 轴的反正弦和 y 轴的反余弦,类似于单轴解。但是,更简单、更有效的方法是使用两个值的比率,这将导致以下结果:

其中倾角 θ 以弧度为单位。
与单轴示例不同,使用两个轴的比率来确定倾斜角度使得确定增量灵敏度非常困难。相反,在给定所需的倾斜分辨率的情况下,确定所需的最小加速度计分辨率更有用。假设一个轴的增量灵敏度随着另一个轴的降低而增加,最终结果是有效的增量灵敏度大致恒定。这意味着选择具有足够分辨率的加速度计,以便在一个角度上实现所需的倾斜步长,对于所有角度来说都足够了。
为了确定加速度计的最低必要分辨率,检查公式6以确定分辨率限制在哪里。由于每个轴的输出依赖于倾斜角的正弦或余弦,并且每个函数的倾斜角度相同,因此最小可分角对应于最小可分加速度。
如图3和图4所示,正弦函数在0°附近的变化率最大,可以表明余弦函数在这一点上的变化率最小。因此,在 y 轴上的加速度变化之前,可以识别由于倾斜度变化而导致的 x 轴上的加速度变化。因此,系统接近 0° 的分辨率主要取决于 x 轴的分辨率。为了检测P°的倾角变化,加速度计必须能够检测到大约

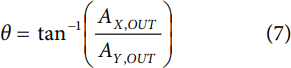
图 9 可用于确定所需倾斜步长所需的最小加速度计分辨率或最大加速度计比例因子。请注意,加速度计分辨率的提高与加速度计比例因子的降低以及检测输出加速度较小变化的能力相对应。因此,在选择具有适当分辨率的加速度计时,比例因子应小于图 9 中所示的预期倾斜步长限制。
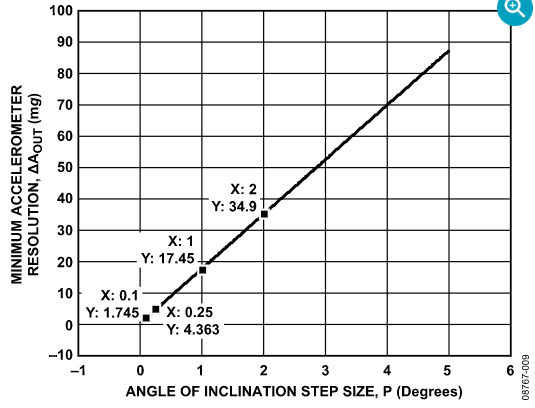
图9.所需倾角分辨率的最小加速度计分辨率减少了对平面对齐的依赖性。
减少对重力平面对齐的依赖
使用至少两个轴的第二个主要好处是,与单轴解决方案不同,单轴解决方案在x轴以外的任何轴上的倾斜都可能导致显着误差,使用第二个轴可以测量准确的值,即使存在第三个轴的倾斜度。这是因为有效增量灵敏度与感兴趣轴上的重力和方根 (RSS) 值成正比。
当重力完全包含在 xy 平面中时,在这些轴上检测到的加速度的 RSS 值理想情况下等于 1 g。如果在 xz 或 yz 平面中存在倾斜,则重力引起的总加速度会降低,这也降低了有效的增量灵敏度。这反过来又增加了给定加速度计分辨率的倾斜步长,但仍能提供准确的测量。倾角计算得出的角度对应于 xy 平面中的旋转。
如果系统足够倾斜,使得xy平面中由于重力引起的加速度非常小,则倾斜角步长将太粗而无法使用;因此,建议限制 XZ 或 YZ 平面中的倾斜度。
完整的 360° 倾斜感应
使用第二轴的第三个主要好处是能够区分每个象限并测量整个 360° 弧的角度。如图 10 所示,每个象限都有与 x 轴和 y 轴加速度相关的不同符号组合。
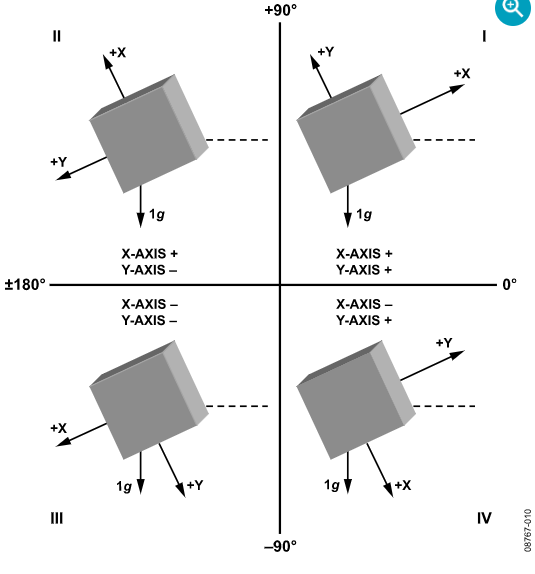
图 10.用于象限检测的倾斜角度和加速度符号。
反正切函数在象限 I 中返回一个值,如果操作数 A删除/一个Y,输出,是积极的;如果操作数为负数,则反切函数返回象限 IV 中的值。由于象限 II 中的操作数为负数,因此当角度位于该象限中时,应在计算结果中添加 180° 的值。由于象限 III 中的操作数为正数,因此当角度位于该象限中时,应从计算结果中减去 180° 的值。计算角度的正确象限可以通过检查每个轴上测量的加速度符号来确定。
三轴倾斜计算
当引入第三个轴时,可以在一个完整的球体中确定传感器的方向。矩形 (x, y, z) 到球形 (ρ, θ, φ) 转换的经典方法可用于将 xy 平面中的倾斜角度 θ 和从重力矢量 φ 的倾斜角度与每个轴上测量的加速度相关联,如下所示:

假设唯一测量的加速度是由重力引起的,公式10中操作数的分母可以用常数代替,理想情况下为1,因为当唯一的加速度是重力时,所有轴的RSS值都是恒定的。角度如图 11 所示,其中图 11c 仅显示 xy 平面中的 θ,图 11d 显示 φ 作为 z 轴和重力矢量之间的角度。
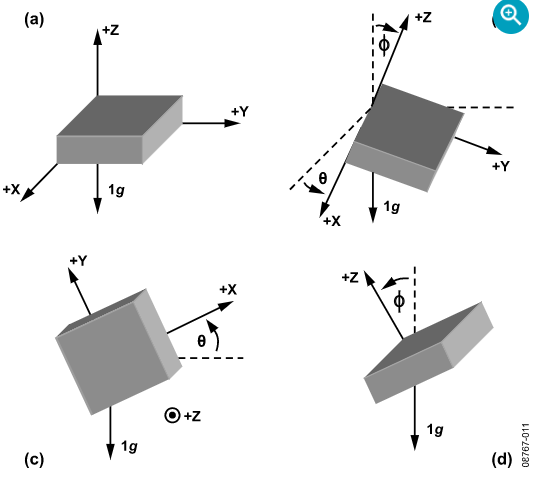
图 11.球面坐标系的角度。
由于三轴法方程与单轴和双轴方法方程相似,三轴解的分析与单轴和双轴方法组合的分析相同。θ的测量得益于两个正交轴的比值,所需的倾角分辨率需要最小加速度计分辨率,如公式8所示。
φ的测量对应于单轴解决方案的倾角测量,以及确定所需范围内特定倾角分辨率所需的最小加速度计分辨率的方法。不同之处在于,使用反余弦函数来确定φ,当φ为 90° 时会产生最大增量灵敏度,而在 0° 和 180° 时会产生最小增量灵敏度。
公式3中用余弦代替正弦,可以生成类似于图4和图2的曲线。需要注意的是,虽然θ的范围是−180°到+180°,但φ的范围只有0°到180°。φ的负角度会导致 θ 的角度变为负。
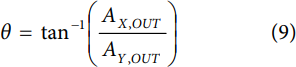
使用三个轴进行倾角检测的另一种方法是从参考位置单独确定加速度计每个轴的角度。参考位置被视为设备的典型方向,其中 x 轴和 y 轴位于地平线平面(0 g 场),z 轴与地平线正交(1 g 场)。如图 12 所示,其中 θ 表示地平线与加速度计 x 轴之间的角度,ψ表示地平线与加速度计 y 轴之间的角度,φ为重力矢量与 z 轴之间的角度。当在 x 轴和 y 轴上的初始位置为 0 以及 z 轴上的初始位置为 1 g 时,所有计算的角度均为 0°。
图 12.用于独立倾角传感的角度。
基本三角函数可用于显示可以使用公式11、公式12和公式13计算倾斜角度。
公式13中操作数的明显反转是由于初始位置为1 g场。如果需要将地平线作为 z 轴的参考,则可以反转操作数。正角表示加速度计的相应正轴指向地平线上方,而负角度表示轴指向地平线下方。
由于使用了反切函数和加速度比,因此双轴示例中提到的好处适用,即有效增量灵敏度是恒定的,并且可以精确测量单位球面周围所有点的角度。
失调和灵敏度失配误差校准
本应用笔记中的分析是在假设使用理想加速度计的情况下进行的。这对应于没有0 g偏移且具有完美灵敏度(模拟传感器表示为mV/g或数字传感器为LSB/g)的器件。尽管传感器经过修整,但这些设备本质上是机械的,这意味着系统组装后零件上的任何静态应力都可能影响偏移和灵敏度。这与工厂校准的限制相结合,可能会导致超出应用允许限制的误差。
失调误差的影响
为了演示误差有多大,首先想象一个具有完美灵敏度但在 x 轴上偏移为 50 mg 的 dua-laxis 解决方案。在 0° 时,x 轴读数为 50 m g,y 轴读数为 1 g。计算出的角度为 2.9°,导致误差为 2.9°。在±180°时,x轴将报告50 m g,而y轴将报告-1 g。这将导致计算的角度和误差为-2.9°。对于此示例,计算角度与实际角度之间的误差如图 13 所示。与系统所需的精度相比,失调引起的误差可能不仅很大,而且可能会发生变化,因此难以简单地校准误差角度。当包含多个轴的偏移时,这变得更加复杂。
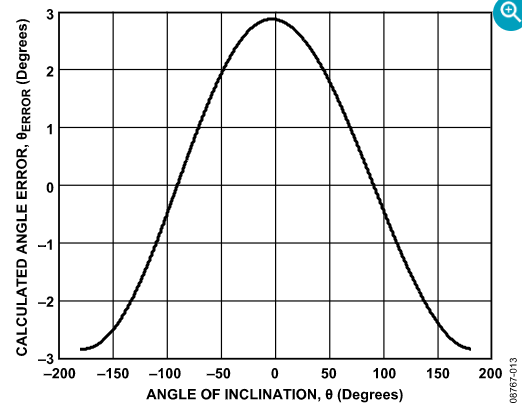
图 13.计算出加速度计偏移引起的角度误差。
灵敏度失配误差的影响
在双轴倾角检测应用中,加速度计灵敏度导致的主要误差成分是当目标轴之间存在灵敏度差异时(与单轴解决方案相反,在单轴解决方案中,实际灵敏度与预期灵敏度之间的任何偏差都会导致误差)。由于使用了x轴和y轴的比率,因此如果灵敏度相同,则大部分误差将被消除。
作为加速度计灵敏度不匹配影响的示例,假设使用具有完美偏移微调、y 轴完美灵敏度和 x 轴 +5% 灵敏度的双轴解决方案。这意味着在 1 g 字段中,y 轴报告 1 g,而 x 轴报告 1.05 g。图14显示了由于这种灵敏度不匹配而导致的计算角度误差。与偏移误差类似,加速度计灵敏度不匹配引起的误差在整个旋转范围内变化,因此在计算倾角后难以补偿误差。通过改变 y 轴灵敏度进一步偏斜失配会导致更大的误差。
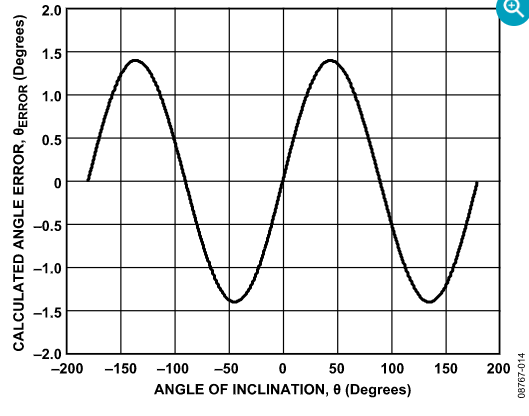
图 14.由于加速度计灵敏度不匹配而导致的角度误差计算。
基本校准技术
当失调和灵敏度不匹配引起的误差结合在一起时,误差可能会变得非常大,远远超出倾斜检测应用中的可接受限值。为了减少此误差,应校准偏移和灵敏度,并使用校准的输出加速度来计算倾斜角度。当包括偏移和灵敏度的影响时,加速度计输出如下:

其中:
AOOFF 是偏移误差,单位为 g。
增益是加速度计的增益,理想情况下为1。
AACTUAL 是作用在加速度计上的实际加速度和所需值,以 g 为单位。
一个简单的校准方法是假设增益为1并测量失调。然后,此校准将系统的精度限制为灵敏度的未校准误差。简单的校准方法可以通过将目标轴放入0 g场中并测量输出来完成,输出等于偏移。然后,在处理信号之前,应从加速度计的输出中减去该值。这通常被称为无转弯或单点校准,因为设备的典型方向将 x 轴和 y 轴置于 0 g 视场中。如果使用三轴设备,则 z 轴应至少包括一个转弯或第二个点。
更准确的校准方法是每个感兴趣的轴使用两个点(对于三轴设计,最多六个点)。当将轴放入 +1 g 和 −1 g 场时,测量输出如下:


其中偏移量 AOFF 以 g 为单位。
这两个点可用于确定失调和增益,如下所示:


其中 +1 g 和 −1 g 测量值 A+1g 和 A−1g 以 g 为单位。
这种类型的校准还有助于最大限度地减少跨轴灵敏度影响,因为在对目标轴进行测量时,正交轴处于0 g视场中。这些值的使用方法是:首先从加速度计测量中减去偏移,然后将结果除以增益。

其中 AOUT 和 AOFF 在 g 中。
公式15至公式19中AOF和增益的计算假设加速度值A+1g和A−1g以g为单位。如果使用以mg为单位的加速度,则公式17中AOF的计算保持不变,但公式18中的增益计算应除以1000,以考虑单位的变化。
审核编辑:郭婷
-
陀螺仪
+关注
关注
44文章
826浏览量
99606 -
adc
+关注
关注
99文章
6621浏览量
547963 -
加速度计
+关注
关注
6文章
710浏览量
46528
发布评论请先 登录
基于加速度计的倾角测量精度提高
2476-100加速度计
2460-010加速度计
2422H-400加速度计
2227-050加速度计模块
1410L-100加速度计
1527J-010加速度计
1521L-200加速度计


MEMS加速度计的概念,MEMS加速度计的原理

TwinCAT3 EtherCAT抓包 | 技术集结
在使用TwinCAT测试EtherCATEOE功能时,我们会发现正常是无法使用Wireshark去进行网络抓包抓取EtherCAT报文的,今天这篇文章就带大家来上手EtherCAT抓包方式。准备环境硬件环境:EtherKit开发板网线一根Type-CUSB线一根软件环境TwinCAT3RT-ThreadstudiowiresharkEtherCATEOE工程

EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用
机器视觉是基于软件与硬件的组合,通过光学装置和非接触式的传感器自动地接受一个真实物体的图像,并利用软件算法处理图像以获得所需信息或用于控制机器人运动的装置。机器视觉可以赋予机器人及自动化设备获取外界信息并认知处理的能力。机器视觉系统内包含光学成像系统,可以作为自动化设备的视觉器官实现信息的输入,并借助视觉控制器代替人脑实现信息的处理与输出。从而实现赋予自动化

新品 | 26+6TOPS强悍算力!飞凌嵌入式FCU3501嵌入式控制单元发布
飞凌嵌入式FCU3501嵌入式控制单元基于瑞芯微RK3588处理器开发设计,4xCortex-A76+4xCortex-A55架构,A76主频高达2.4GHz,A55核主频高达1.8GHz,支持8K编解码,NPU算力6TOPS,支持算力卡拓展,可以插装Hailo-8 26TOPS M.2算力卡。
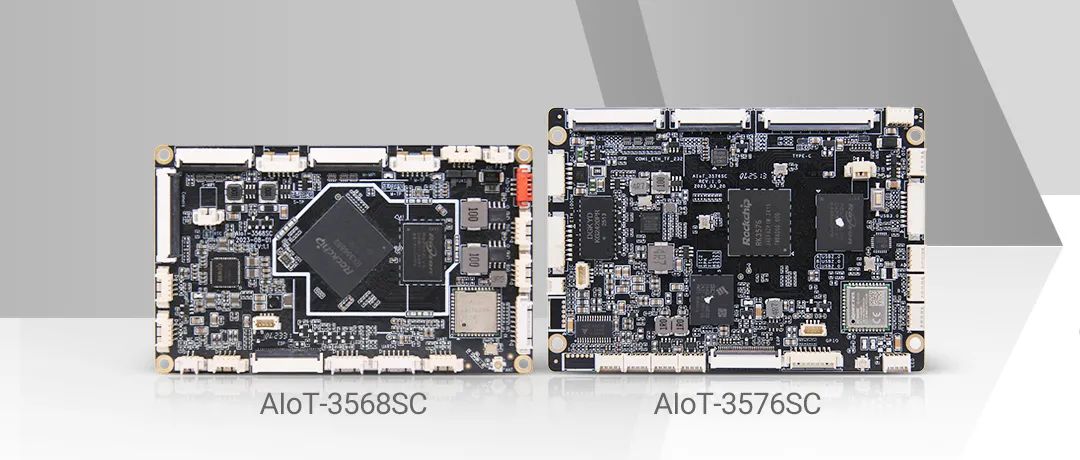
接口核心板必选 | 视美泰AIoT-3568SC 、 AIoT-3576SC:小身材大能量,轻松应对多场景设备扩展需求!
在智能硬件领域,「适配」是绕不开的关键词。无论是小屏设备的”寸土寸金”,还是模具开发的巨额成本,亦或是多产品线兼容的复杂需求,开发者总在寻找一款能「以不变应万变」的核心解决方案。视美泰旗下的AIoT-3568SC与AIoT-3576SC接口核心板系列,可以说是专为高灵活适配场景而生!无需为设备尺寸、模具限制或产品线差异妥协,一块核心板,即可释放无限可能。为什
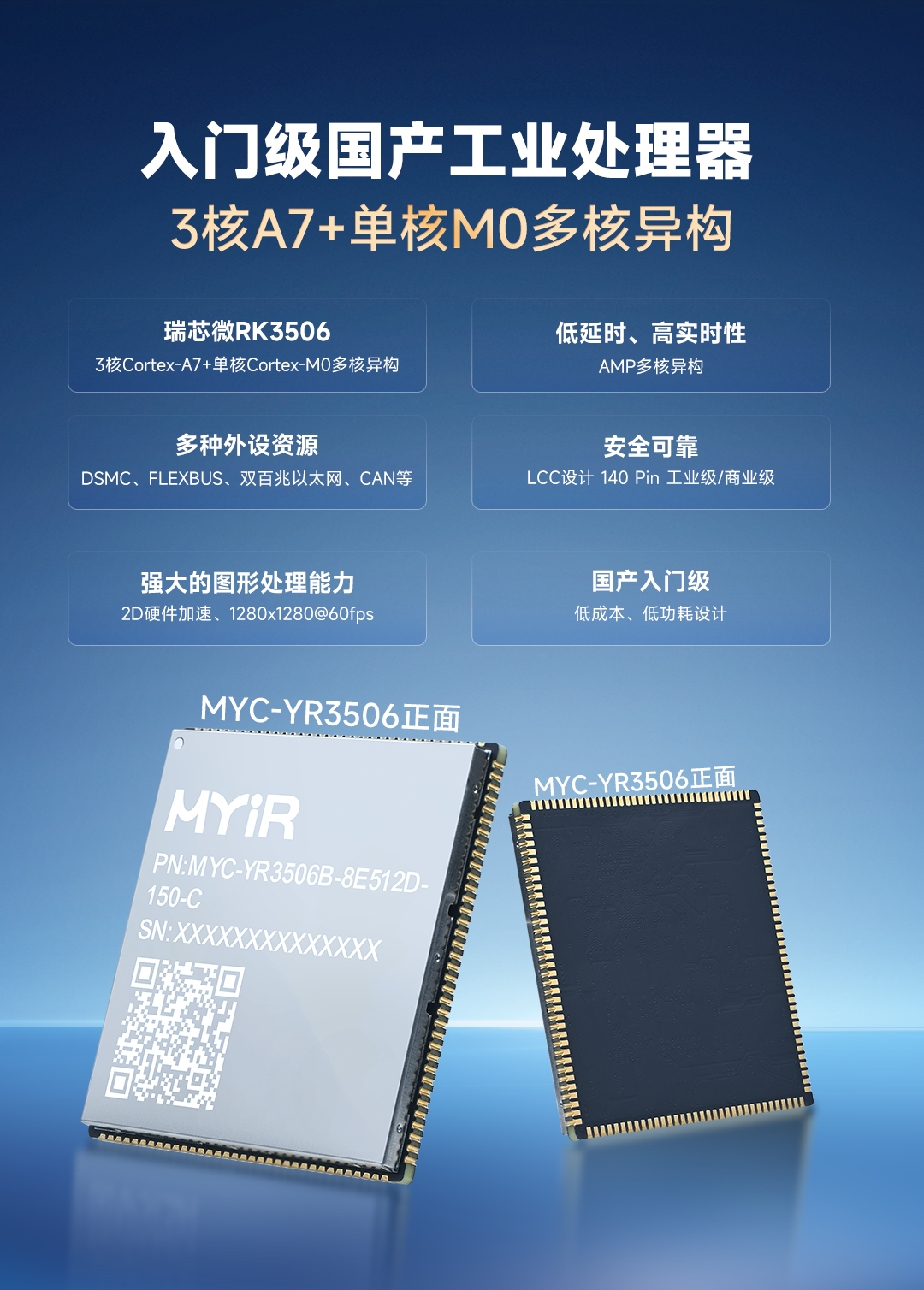
3核A7+单核M0多核异构,米尔全新低功耗RK3506核心板发布
近日,米尔电子发布MYC-YR3506核心板和开发板,基于国产新一代入门级工业处理器瑞芯微RK3506,这款芯片采用三核Cortex-A7+单核Cortex-M0多核异构设计,不仅拥有丰富的工业接口、低功耗设计,还具备低延时和高实时性的特点。核心板提供RK3506B/RK3506J、商业级/工业级、512MB/256MBLPDDR3L、8GBeMMC/256
搭建树莓派网络监控系统:顶级工具与技术终极指南!
树莓派网络监控系统是一种经济高效且功能多样的解决方案,可用于监控网络性能、流量及整体运行状况。借助树莓派,我们可以搭建一个网络监控系统,实时洞察网络活动,从而帮助识别问题、优化性能并确保网络安全。安装树莓派网络监控系统有诸多益处。树莓派具备以太网接口,还内置了Wi-Fi功能,拥有足够的计算能力和内存,能够在Linux或Windows系统上运行。因此,那些为L

STM32驱动SD NAND(贴片式SD卡)全测试:GSR手环生物数据存储的擦写寿命与速度实测
在智能皮电手环及数据存储技术不断迭代的当下,主控 MCU STM32H750 与存储 SD NAND MKDV4GIL-AST 的强强联合,正引领行业进入全新发展阶段。二者凭借低功耗、高速读写与卓越稳定性的深度融合,以及高容量低成本的突出优势,成为大规模生产场景下极具竞争力的数据存储解决方案。

芯对话 | CBM16AD125Q这款ADC如何让我的性能翻倍?
综述在当今数字化时代,模数转换器(ADC)作为连接模拟世界与数字系统的关键桥梁,其技术发展对众多行业有着深远影响。从通信领域追求更高的数据传输速率与质量,到医疗影像领域渴望更精准的疾病诊断,再到工业控制领域需要适应复杂恶劣环境的稳定信号处理,ADC的性能提升成为推动这些行业进步的重要因素。行业现状分析在通信行业,5G乃至未来6G的发展,对基站信号处理提出了极
史上最全面解析:开关电源各功能电路
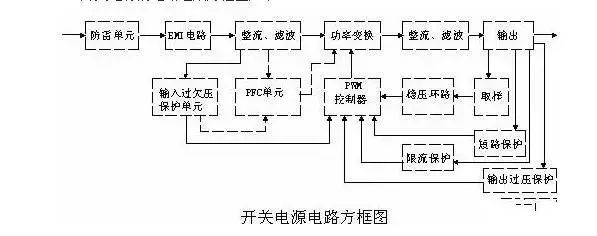
01开关电源的电路组成开关电源的主要电路是由输入电磁干扰滤波器(EMI)、整流滤波电路、功率变换电路、PWM控制器电路、输出整流滤波电路组成。辅助电路有输入过欠压保护电路、输出过欠压保护电路、输出过流保护电路、输出短路保护电路等。开关电源的电路组成方框图如下:02输入电路的原理及常见电路1AC输入整流滤波电路原理①防雷电路:当有雷击,产生高压经电网导入电源时
有几种电平转换电路,适用于不同的场景
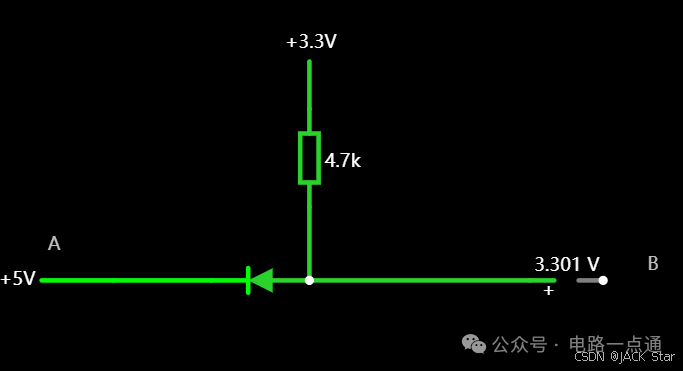
一.起因一般在消费电路的元器件之间,不同的器件IO的电压是不同的,常规的有5V,3.3V,1.8V等。当器件的IO电压一样的时候,比如都是5V,都是3.3V,那么其之间可以直接通讯,比如拉中断,I2Cdata/clk脚双方直接通讯等。当器件的IO电压不一样的时候,就需要进行电平转换,不然无法实现高低电平的变化。二.电平转换电路常见的有几种电平转换电路,适用于

瑞萨RA8系列教程 | 基于 RASC 生成 Keil 工程
对于不习惯用 e2 studio 进行开发的同学,可以借助 RASC 生成 Keil 工程,然后在 Keil 环境下愉快的完成开发任务。

共赴之约 | 第二十七届中国北京国际科技产业博览会圆满落幕
作为第二十七届北京科博会的参展方,芯佰微有幸与800余家全球科技同仁共赴「科技引领创享未来」之约!文章来源:北京贸促5月11日下午,第二十七届中国北京国际科技产业博览会圆满落幕。本届北京科博会主题为“科技引领创享未来”,由北京市人民政府主办,北京市贸促会,北京市科委、中关村管委会,北京市经济和信息化局,北京市知识产权局和北辰集团共同承办。5万平方米的展览云集

道生物联与巍泰技术联合发布 RTK 无线定位系统:TurMass™ 技术与厘米级高精度定位的深度融合
道生物联与巍泰技术联合推出全新一代 RTK 无线定位系统——WTS-100(V3.0 RTK)。该系统以巍泰技术自主研发的 RTK(实时动态载波相位差分)高精度定位技术为核心,深度融合道生物联国产新兴窄带高并发 TurMass™ 无线通信技术,为室外大规模定位场景提供厘米级高精度、广覆盖、高并发、低功耗、低成本的一站式解决方案,助力行业智能化升级。

智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
电源入口处防反接电路-汽车电子硬件电路设计
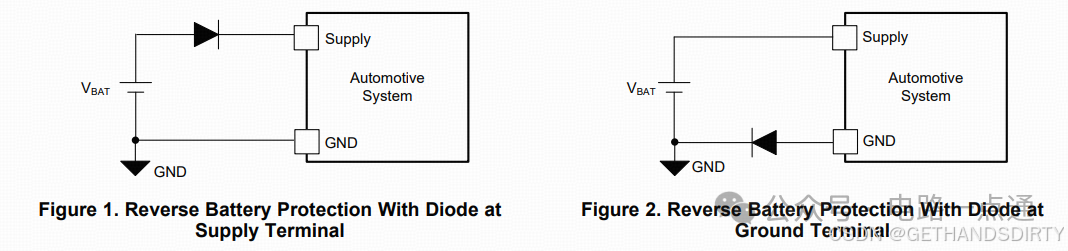
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极





 工商网监
工商网监
评论