 CMUcam5 Pixy视觉相机传感器简介第二部分—创建球平衡梁
CMUcam5 Pixy视觉相机传感器简介第二部分—创建球平衡梁
这篇文章来源于DevicePlus.com英语网站的翻译稿。
点击此处跳转至本文第一部分 >
这是CMUcam5 Pixy简介的第二部分。如果您对PixyMon不太熟悉,请先回顾 CMUcam5 Pixy视觉相机传感器简介。在第一部分中,我介绍了Pixy的基础知识,解释了hello_world代码,并创建了一个简单的伺服驱动的应用程序。在本教程中,我将进一步探索Pixy的应用,创建一个球平衡梁。通过一个伺服来设置平衡梁的角度,使球停留在中间,当然,Pixy相机传感器会对球进行追踪。
硬件
Arduino Uno (您可以使用任何 Arduino)
CMUcam5 Pixy 相机
伺服电机 (S06NF)
木片和螺丝
数据线(用于相机USB MINI 以及Uno USB B)
用于伺服的5V外部电源(!警告!如果您将伺服连接到Arduino通过USB进行供电,您的Arduino将会被烧坏)
软件
Arduino IDE 1.6.9
PixyMon 软件 (https://cmucam.org/projects/cmucam5/wiki/Install_PixyMon_on_Windows_Vista_7_8)
PixyMon 用于 Arduino 的库(https://cmucam.org/projects/cmucam5/wiki/Latest_release)
Processing 3.1.1 (https://processing.org/download/?processing)
Processing的简单介绍

Processing是非常有用又灵活的一款软件。它主要用于视觉艺术和科技领域的视觉语言。这款软件具有100多个库,可支持各种项目。它的文档非常齐全,提供了许多使用指南,涵盖了从编程基础到可视化等各种主题。它能够支持所有操作系统(GNU/Linux, Mac OS X, 和 Windows)。该软件的设计几乎和Arduino IDE相同。
今天,我们将使用Processing,通过串行通信实现与Arduino之间的通信。
图1:Processing界面
项目概况
在此项目中,我将制作一个球平衡梁,一个用木头制成的“通道”将会像一杆秤那样使球保持平衡(图2)。平衡梁44cm宽,3cm高。我把它制造的像通道一样狭窄,使我们所追踪的球不会掉落出去。
我使用S06NF伺服电机来移动整个平衡梁,该电机由Arduino进行控制。之后我们会看一下在本教程后面部分的代码。现在,我已经将伺服放置在了距离平衡梁左端¼的位置。

图2:S06NF STD 伺服电机/ ©RobotShop inc.
伺服将上下移动平衡梁,同时,球也会沿着该路径移动。
图3:平衡梁上下移动
数码相机将会放置在平衡梁上。我将相机的视野范围设置为仅限于平衡梁。这样,相机就会只追踪球,不追踪任何其他物体了。
平衡梁结构
首先,我们需要一些用于构建平衡梁的材料。我将要使用的是一种简单的XXMM木材(20cm x 27cm)。我用圆锯来切割木材,但是您可以使用现有的任何类型的锯来完成切割,只要能够保障切割面平整、均匀即可。
图4:XXMM木材
请记住,只有使用正确的工具才能够制造出完美的平衡梁!我使用的是一把锤子、一把直尺、钉子、砂纸、热胶、一个钻头和一把锯子。

图5:工具
首先,我将制造一个通道,使球能够在其中左右移动。通道的侧面由四块木板组成(每个21cm x 3cm)。通道在高度方向的两端将由两块木板(4cm x 3cm)封接。底座的尺寸是42cm x 3cm x 1cm。
我使用15mm大帽钉来连接零部件。

图6:封闭通道
在通道中间建立倾斜点有很多种方法。我使用了一种非常简单的方法,因为成本最低且最容易实现。我用了一个长钉子,两个像轴承一样的小管子,先标记了通道的中心点,然后将这些小轴承热粘合到该中心点,再插入钉子。

图7:用于构建倾斜点的钉子和管子
为了设置倾斜点,我们还需要为钉子制作支架。我用了两块8cm x 2cm的木板,如图8所示。我还制作了一个小平台,可以将所有东西放置在一起,尺寸为12cm x 4.5cm。
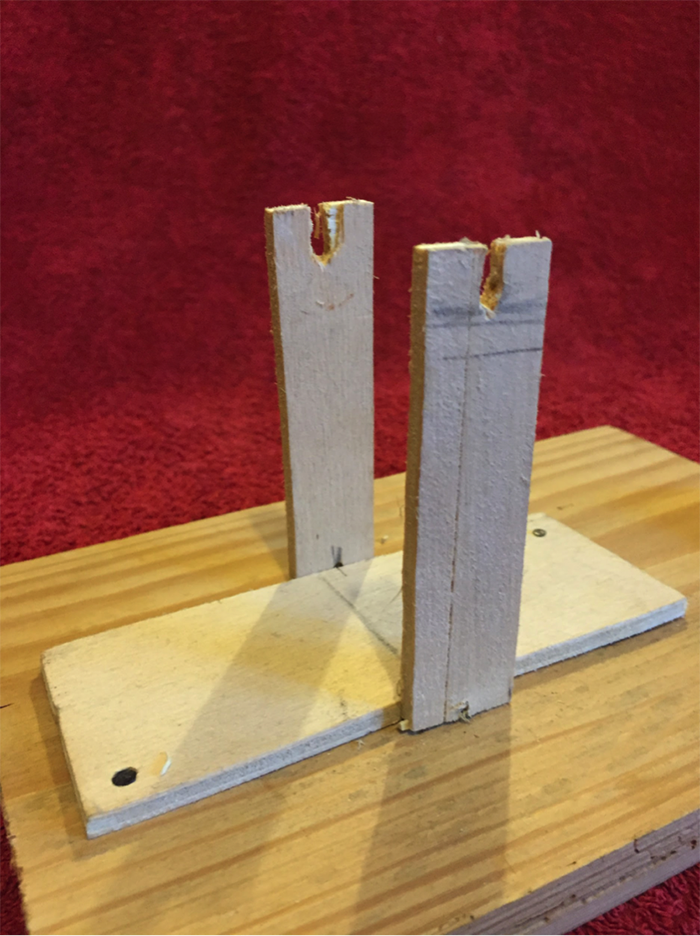
图8:倾斜点支架
我使用了一小块木材来安装伺服并将其架起。

图9:安装在木板上的伺服
在本教程中我使用的是Arduino UNO,但是您也可以使用其他具有SPI连接器的Arduino来连接到Pixy相机。
连接所有部件
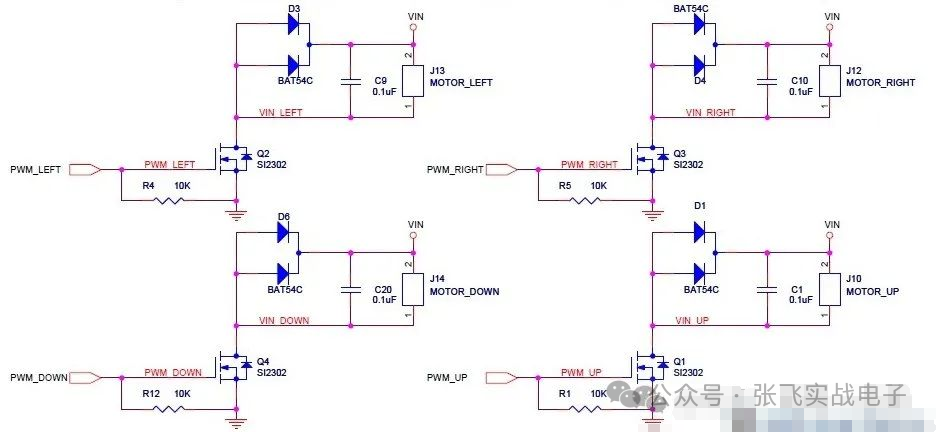
一旦构建完成,下一步就是将Pixy相机连接到Arduino,然后再连接到伺服。原理图与 CMUcam5 Pixy视觉相机传感器简介中的相同。我仍然使用外部5V电源为伺服供电。
!警告!不要忘记连接接地端。如果没有将电源、伺服和Arduino接地端相连接,伺服将会失控!
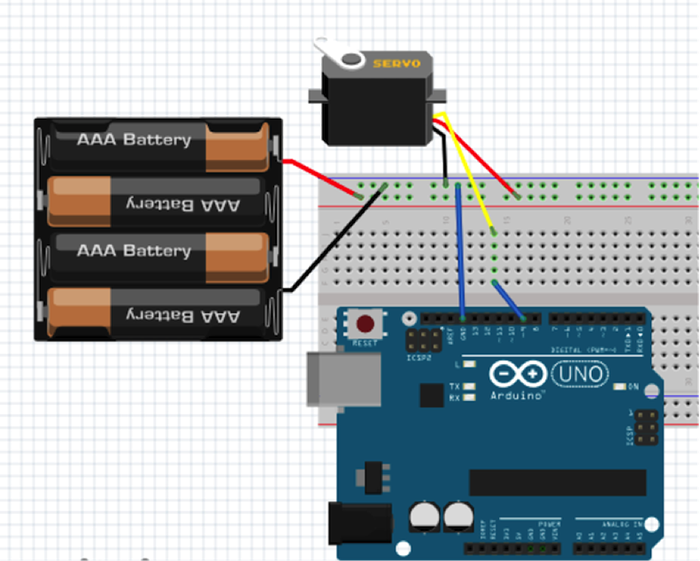
图10:接线图
接下来,我需要在平衡梁结构上方的某个位置设置Pixy,以便它可以随时检测到球的位置。调整设置使其仅可以对球进行检测。请参考第一部分进行设置。

图11:Pixy视觉
现在,让我们来看一些代码。为了检测伺服是否工作正常,我修改了中间、最右边和最左边的角度,使其适合于我的结构。
#include uint8_t leveled = 110; //middle positon for s1 to keep the board leveled uint8_t far_right = 180; //far left positon for s1 to keep the board leveled uint8_t far_left = 0; //far right positon for s1 to keep the board levele Servo s; void setup(){ s.write(leveled); delay(2000); s.write(far_right); delay(2000); s.write(far_left); delay(2000); } void loop(){ }
当然,您可以根据自己的喜好来调整变量。
之前,我介绍了一个名叫Processing的软件。我将使用它通过串行通信来实现与Arduino的通信。
Arduino 代码
简单的串行通信:
#include
#include
char val; // Data received from the serial port
int ledPin = 13; // Set the pin to digital I/O 13
void setup() {
pinMode(ledPin, OUTPUT); // Set pin as OUTPUT
Serial.begin(9600); // Start serial communication at 9600 bps
}
void loop() {
if (Serial.available())
{ // If data is available to read,
val = Serial.read(); // read it and store it in val
}
if (val == '1')
{ // If 1 was received
digitalWrite(ledPin, HIGH); // turn the LED on
} else {
digitalWrite(ledPin, LOW); // otherwise turn it off
}
delay(10); // Wait 10 milliseconds for next reading
}
Processing 代码
import processing.serial.*;
Serial myPort; // Create object from Serial class
void setup()
{
size(200,200); //make our canvas 200 x 200 pixels big
String portName = Serial.list()[0]; //change the 0 to a 1 or 2 etc. to match your port
myPort = new Serial(this, portName, 9600);
}
void draw() {
if (mousePressed == true)
{ //if we clicked in the window
myPort.write('1'); //send a 1
println("1");
} else
{ //otherwise
myPort.write('0'); //send a 0
}
}
改代码创建了一个200×200像素的窗口并初始化串行端口。draw()空函数用于检查是否在窗口上按下了鼠标(如果按下写入1,没有按下则写入0)。
现在,我们来测试代码。点击运行,然后尝试点击窗口中任意位置,这时您的LED灯应发生闪烁,这就表示着一切工作正常!
图12:Processing 和 Arduino代码的基本测试
使用Processing编程
我获取了伺服的相关值,并在Processing中对其进行了处理,所以产生了一个类似于下图所示的图片。
图13:示例图片
请用以下代码创建图像:
import processing.serial.*; Serial myPort; // The serial port int xPos = 1; // horizontal position of the graph float inByte = 0; void setup () { // set the window size: size(400, 300); // List all the available serial ports // if using Processing 2.1 or later, use Serial.printArray() println(Serial.list()); // I know that the first port in the serial list on my mac // is always my Arduino, so I open Serial.list()[0]. // Open whatever port is the one you're using. myPort = new Serial(this, Serial.list()[0], 9600); // don't generate a serialEvent() unless you get a newline character: myPort.bufferUntil('n'); // set inital background: background(0); } void draw () { // draw the line: stroke(127, 34, 255); line(xPos, height, xPos, height - inByte); // at the edge of the screen, go back to the beginning: if (xPos >= width) { xPos = 0; background(0); } else { // increment the horizontal position: xPos++; } } void serialEvent (Serial myPort) { // get the ASCII string: String inString = myPort.readStringUntil('n'); if (inString != null) { // trim off any whitespace: inString = trim(inString); // convert to an int and map to the screen height: inByte = float(inString); println(inByte); inByte = map(inByte, 0, 1023, 0, height); } }
Arduino 代码:
#include
#include
#include
#include
//37 164 288
uint8_t leveled = 110; //middle positon for s1 to keep the board leveled
uint8_t far_right = 180; //far left positon for s1 to keep the board leveled
uint8_t far_left = 0; //far right positon for s1 to keep the board levele
int current_pos = leveled;
int percentage,var,_percen;
Servo s;
Pixy pixy;
void test_board(){
while(Serial.read() != 'b');
Serial.write("Starting test");
s.write(leveled);
delay(2000);
s.write(far_right);
delay(2000);
s.write(far_left);
delay(2000);
Serial.write("Finished test, press any key to continue");
while(Serial.read() != 'c');
s.write(current_pos);
Serial.write("Continued");
}
void setup() {
Serial.begin(9600);
s.attach(9);
pixy.init();
while (!Serial);
//test_board();
s.write(current_pos);
}
void _servo(unsigned char side,int var){
//by the % we get how "hard" we need to wip :D
var = var - 90;
if(side == 'L'){
//Serial.write("LEFT");
//90 180
_percen = 90 + var;
s.write(_percen);
}else{
//Serial.write("RIGHT");
//0 90
_percen = 90 - var;
s.write(_percen);
}
}
void loop() {
static int i = 0;
int j;
uint16_t blocks;
char buf[32];
// grab blocks!
blocks = pixy.getBlocks();
// If there are detect blocks, print them!
if (blocks)
{
i++;
// do this (print) every 50 frames because printing every
// frame would bog down the Arduino
if (i%1 ==0)
{
//sprintf(buf, "Detected %d:n", blocks);
//Serial.print(buf);
for (j=0; j= 0){
// Serial.write("LEFT");
var = percentage / 0.4;
_servo('L',var);
}else if(percentage >= 60 && percentage <= 110){
//Serial.write("RIGHT");
var = (percentage - 60) / 0.5;
_servo('R',var);
}else{
//Serial.write("MIDDLE");
}
}
}
}
}
代码释义
我将x的位置从Pixy转换为0-100%,并由此了解球的具体位置。通过获取球的位置,我可以调整伺服转速。如果球的位置<=10%,伺服会转得更快来维持平衡;如果在~40%附近,伺服会以很低的转速来维持平衡。想要一直保持平衡是比较棘手的,我们可以改进算法以使其更加精确。
以下是一些有益于提升的建议:
• 尝试多种算法
• 有多种类型的数学算法可以进行计算。我至少尝试了两到三种,但是最后决定选择该算法。我建议您自己来编写算法,以更好地掌握这种平衡的方法。
• 更好的硬件
• 对于本项目来说,没有什么材料可称得上是完美的,木材就更差得远了。如果我拥有及时可用的资源,那我会选择用金属来建造它,这样整个项目将会更加稳定和精确。
• 变得更快
• 我们如何做到使其更快地恢复平衡?我在这里使用了一个简单的伺服。我们可以将其替换为UART或者AX-12之类的伺服,它们会强大、快速得多。速度也与算法有关。同样,我建议您尝试不同的算法,以找到适用于您的目的的算法。
有许多项目使用类似的概念来对平衡某物体。除了Pixy,您还可以将OpenCV与任何网络相机一起使用来检测目标和颜色。除了Processing,还有Max/MSP版本5。您可以使用距离传感器、压力传感器等。因此,有多种方式可以帮助您对该项目进行提升,使其更加坚固、稳定和更快。
审核编辑黄宇
-
传感器
+关注
关注
2561文章
52311浏览量
762372 -
Arduino
+关注
关注
188文章
6485浏览量
189835
发布评论请先 登录
python入门圣经-高清电子书(建议下载)
松下MPS媒体制作平台 第十一篇:深入探索自动跟踪插件(第二部分)

I2C接口的DAC8571输出不正常是什么原因?
Sony偏振传感器加持 Blackfly S工业相机突破视觉成像反光难题

视觉AI之旅:一起探索 FiftyOne ——第二部分 入门指南

松下MPS媒体制作平台第七篇:视频混合器插件(第二部分)

安森美机器视觉系统解决方案
Air780EP硬件设计原理解析(第二部分)

0.4mm层叠封装(PoP)封装的PCB组装指南,第二部分

精密制造的革新:光谱共焦传感器与工业视觉相机的融合
求助,opa695的datesheet问题求解
使用rt_thread_mdelay函数后出现hardfault的原因?

瑞萨RA8系列教程 | 基于 RASC 生成 Keil 工程
对于不习惯用 e2 studio 进行开发的同学,可以借助 RASC 生成 Keil 工程,然后在 Keil 环境下愉快的完成开发任务。

共赴之约 | 第二十七届中国北京国际科技产业博览会圆满落幕
作为第二十七届北京科博会的参展方,芯佰微有幸与800余家全球科技同仁共赴「科技引领创享未来」之约!文章来源:北京贸促5月11日下午,第二十七届中国北京国际科技产业博览会圆满落幕。本届北京科博会主题为“科技引领创享未来”,由北京市人民政府主办,北京市贸促会,北京市科委、中关村管委会,北京市经济和信息化局,北京市知识产权局和北辰集团共同承办。5万平方米的展览云集

道生物联与巍泰技术联合发布 RTK 无线定位系统:TurMass™ 技术与厘米级高精度定位的深度融合
道生物联与巍泰技术联合推出全新一代 RTK 无线定位系统——WTS-100(V3.0 RTK)。该系统以巍泰技术自主研发的 RTK(实时动态载波相位差分)高精度定位技术为核心,深度融合道生物联国产新兴窄带高并发 TurMass™ 无线通信技术,为室外大规模定位场景提供厘米级高精度、广覆盖、高并发、低功耗、低成本的一站式解决方案,助力行业智能化升级。

智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
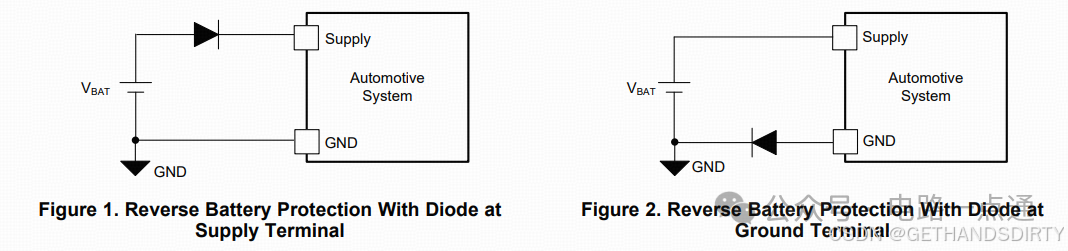
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
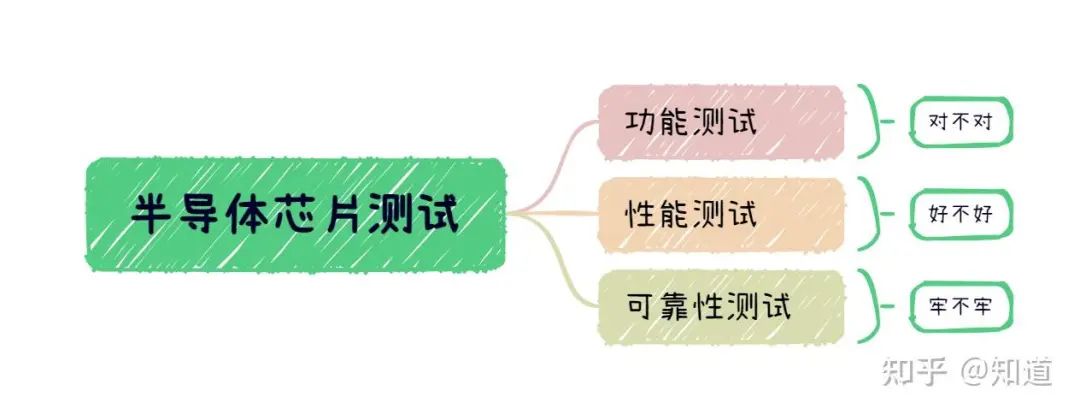
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
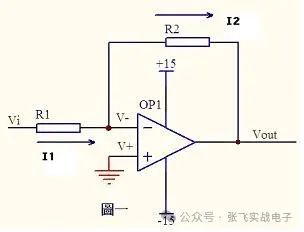
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
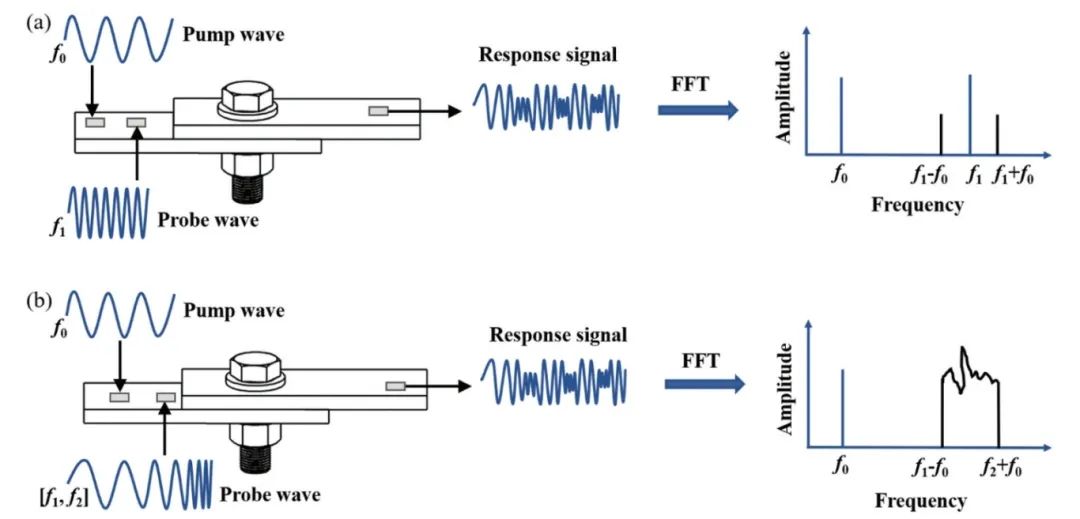
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存





 工商网监
工商网监
评论