 针对温度控制过程而设计的FB58
针对温度控制过程而设计的FB58
功 能:FB58 “TCONT_CP“ 针对温度控制过程而设计(也可应用于其他控制过程),可实现连续调节及比例调节元件的两级调节。
输出类型:模拟量输出或PWM输出可选。
应用领域:特别适用于温度控制过程,可选 PI 或 PID 控制方式。适用于带自整定功能的回路。
特 点:具备温度信号转换的功能,带自整定功能,同时具备模拟量输出和PWM输出方式,两步控制方式,比例作用可弱化,控制带功能。
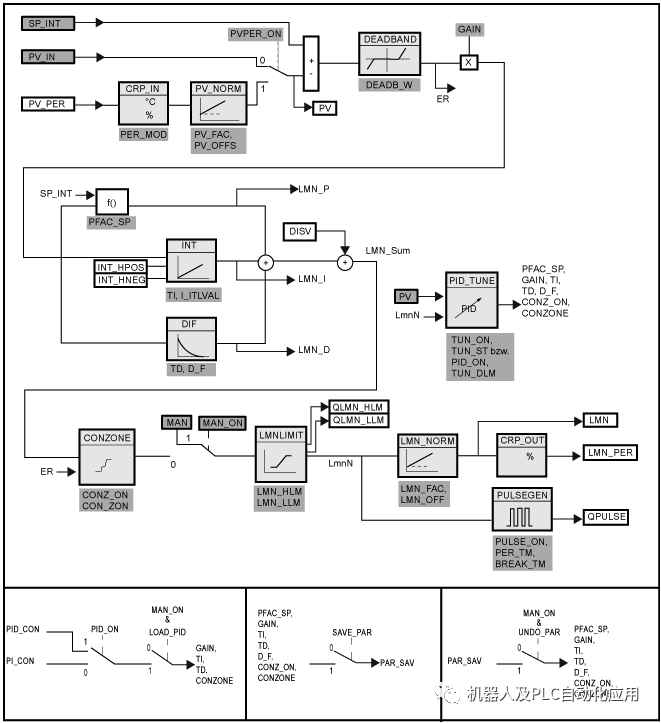
图1.FB58"TCONT_CP" 的方框图
主要参数
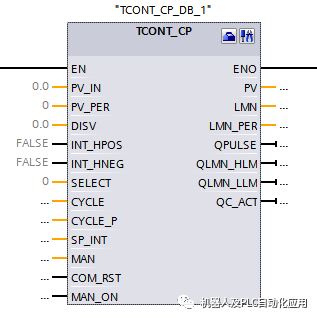
图2. FB58"TCONT_CP"程序块
注:以TIA Portal V13 SP1为例,该功能块在STEP 7中的管脚与其相同
表1. FB58"TCONT_CP" 的输入参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| PV_IN | IN | REAL | -100~100(%)或者 物理值 | 0.0 | 过程变量输入 | 必须与SP_INT单位一致 |
| PV_PER | IN | INT | 0 | 外设过程变量输入 | PIW xxx | |
| DISV | IN | REAL | -100~100(%) | 0.0 | 干扰变量 | |
| INT_HPOS | IN | BOOL | FLASE | 积分作用的输出可在正向保持 | 必须与SP_INT单位一致 | |
| INT_HNEG | IN | BOOL | FLASE | 积分作用的输出可在负向保持 | ||
| SELECT | IN | INT | 0 | 模式选择 |
如果脉冲整形器开启,则有几种方法可以调用 PID 算法和脉冲整形器: SELECT = 0:以快速循环中断优先级等级调用控制器,处理 PID 算法和脉冲整形器。 SELECT = 1:在 OB1 中调用控制器,仅处理 PID 算法。 SELECT = 2:以快速循环中断优先级等级调用控制器,仅处理脉冲整形器。 SELECT = 3:以慢速循环中断优先级等级调用控制器,仅处理 PID 算法。 |
表2. FB58"TCONT_CP" 的输入输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| CYCLE | IN/OUT | REAL | 0.1(s) | 采样时间 | ||
| CYCLE_P | IN/OUT | REAL | 0.02(s) | 脉冲整形器作用的采样时间 | ||
| SP_INT | IN/OUT | REAL | 0.0 | 设定值 | ||
| MAN | IN/OUT | REAL | 0.0 | 手动控制值 | ||
| COM_RST | IN/OUT | BOOL | 0.0 | 完全重启动 | 置位后自动复位 | |
| MAN_ON | IN/OUT | BOOL | TRUE | 手/自动切换按钮 |
MAN_ON: 0:自动 1:手动 |
表3. FB58"TCONT_CP"的输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| LMN | OUT | REAL | 0.0 | 调节值 | ||
| LMN_PER | OUT | INT | 0 | 外设调节值 | PQW xxx | |
| QLMN_HLM | OUT | BOOL | FALSE | 调节值上限报警 | ||
| QLMN_LLM | OUT | BOOL | FALSE | 调节值下限报警 | ||
| LMN_P | OUT | REAL | 0.0 | 比例分量 | ||
| LMN_I | OUT | REAL | 0.0 | 积分分量 | ||
| LMN_D | OUT | REAL | 0.0 | 微分分量 | ||
| PV | OUT | REAL | 0.0 | 当前值输出 | ||
| QPLUSE | OUT | BOOL | FLASE | 脉冲输出 | ||
| QC_ACT | OUT | BOOL | FLASE | 连续控制指示 | 此参数指示是否在下一次调用块时处理连续控制组件(仅当 SELECT 的值为 0 或为 1 时才相关) |
表4. FB58"TCONT_CP"的常用静态参数
| 参数 | 偏移量 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| DEAD_W | 44.0 | REAL | 0.0 | 死区 | ||
| I_ITLVAL | 48.0 | REAL | -100~100(%) | 0.0 | 积分初始值 | |
| LMN_HLM | 52.0 | REAL | FALSE | 输出值上限 | ||
| LMN_LLM | 56.0 | REAL | FALSE | 输出值下限 | ||
| PER_TM | 76.0 | REAL | 0.0 | 周期时间 | 脉冲调制的周期时间 | |
| P_B_TM | 80.0 | REAL | 0.0 | 最小脉冲/中断时间 | 防止阀门频繁开关 | |
| TUN_DLMN | 84.0 | REAL | -100~100(%) | 0.0 | 阶跃值 | 控制器调节的过程激发是由 TUN_DLMN 中的输出值阶跃变化引起的。 |
| PER_MODE | 88.0 | INT | 0 | 输入值模式选择 |
可使用此开关输入 I/O 模块的类型。然后,在 PV 输出中对输入 PV_PER 中的过程值进行如下标定: PER_MODE = 0:热电偶;PT100/NI100;标准 PV_PER * 0.1 单位:°C,°F PER_MODE = 1:PT100/NI100;气候型 PV_PER * 0.01 单位:°C,°F PER_MODE = 2:电流/电压 PV_PER * 100/27648 单位:% |
|
| PVPER_ON | 90.0 | BOOL | FLASE | 当前值选择外设 |
PVPER_ON: 0:当前值选择PV_IN 1:当前值选择PV_PER |
|
| I_ITL_ON | 90.1 | BOOL | FLASE | 积分设定值 |
I_ITL_ON: 0:积分作用值由偏差计算 1:积分作用值为I_ITVAL |
|
| PULSE_ON | 90.2 | BOOL | FLASE | 激活脉冲功能 | ||
| ER | 92.0 | REAL | 0.0 | 偏差 | ER=SP_INT-PV_IN | |
| LMN_P | 96.0 | REAL | 0.0 | 比例分量 | ||
| LMN_I | 100.0 | REAL | 0.0 | 积分分量 | ||
| LMN_D | 104.0 | REAL | 0.0 | 微分分量 | ||
| PHASE | 108.0 | INT | 0 | 自整定阶段 |
在输出 PHASE 中指示控制器调节的当前阶段。 PHASE = 0:无调节模式;自动模式或手动模式 PHASE = 1:启动调节准备就绪;检查参数、等待激发、测量采样时间 PHASE = 2:实际调节:使用常量输出值搜索拐点。在背景数据块中输入采样时间。 PHASE = 3:计算过程参数。在进行调节之前保存有效的控制器参数。 PHASE = 4:控制器设计 PHASE = 5:根据新的调节变量跟踪控制器 PHASE = 7:验证过程类型 |
|
| STATUS_H | 110.0 | INT | 0 | 整定状态字 | ||
| STATUS_D | 112.0 | INT | 0 | 被控对象类型 | 一阶、二阶等被控对象 | |
| PI_CON | 116.0 | STRUCT | PI 控制器 | |||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| PID_CON | 124.0 | STRUCT | PID 控制器 | |||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +8.0 | REAL | (s) | 0.0 | 微分参数 | |
| PAR_SAVE | 136.0 | STRUCT | PID 参数存储 | |||
| PFAC_SP | +0.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | +4.0 | REAL | 0.0 | 比例参数 | ||
| TI | +8.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +12.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | +16.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | +20.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | +24.0 | BOOL | FLASE | 控制带使能 | ||
| PFAC_SP | 162.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | 166.0 | REAL | 0.0 | 比例参数 | ||
| TI | 170.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | 174.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | 178.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | 182.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | 186.0 | BOOL | FLASE | 控制带使能 | ||
| TUN_ON | 186.1 | BOOL | FLASE | 启动自整定 | ||
| TUN_ST | 186.2 | BOOL | FLASE | 激活激励 | 如果在控制器调节期间操作点的设定值保持恒定,则 TUN_ST=1 将激活输出值阶跃变化(变化量为 TUN_DLMN)。 | |
| UNDO_PAR | 186.3 | BOOL | FLASE | 加载参数 | 从数据结构 PAR_SAVE 加载控制器参数 PFAC_SP、GAIN、TI、TD、D_FCONZ_ON 和 CON_ZONE (仅在手动模式下有效)。 | |
| SAVE_PAR | 186.4 | BOOL | FLASE | 保存参数 | 在数据结构 PAR_SAVE 中保存控制器参数 PFAC_SP、GAIN、TI、TD、D_F、CONZ_ON 和 CON_ZONE。 | |
| LOAD_PID | 186.5 | BOOL | FLASE | 加载参数 | 根据 PID_ON,从数据结构 PI_CON 或 PID_CON 加载控制器参数 GAIN、TI,TD(仅在手动模式下有效) | |
| PID_ON | 186.6 | BOOL | FLASE | 模式选择 |
在输入 PID_ON 中,可以指定已调整的控制器作为 PI 控制器还是作为 PID 控制器运行。 PID 控制器:PID_ON = TRUE PI 控制器:PID_ON = FALSE 但是,对于某些过程类型,尽管 PID_ON = TRUE,仍然只能设计 PI 控制器。 |
|
手/自动选择(MAN_ON)
表5.MAN_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| MAN_ON | 0 | 自动控制:PID经过程序块计算输出 |
| MAN_ON | 1 | 手动控制:直接由MAN控制输出 |
当前值PV_IN与PV_PER的选择
表6.PVPER_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| PVPER_ON | 0 | PV_IN有效 |
| PVPER_ON | 1 | PV_PER有效 |
注:无论当前值选择哪个管脚,SP_INT必须与其量纲相同
当选择PV_IN作为反馈值时, FB58"TCONT_CP"与FB41"CONT_C"的用法一样
PVPER_ON=1时,PER_MODE模式选择
表7.PID参数设定
| 参数 | 描述 | 公式 |
|---|---|---|
| PER_MODE=0 | 热电偶或热电阻标准型 | PV_PER*0.1 |
| PER_MODE=1 | 热电阻气候型 | PV_PER*0.01 |
| PER_MODE=2 | 电流/电压转换 | PV_PER * 100/27648 |
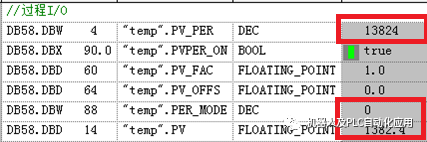
图3. PER_MODE=0
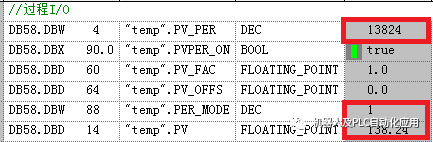
图4. PER_MODE=1
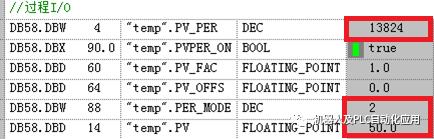
图5. PER_MODE=2
审核编辑:刘清
-
温度控制
+关注
关注
7文章
290浏览量
37020 -
PWM
+关注
关注
116文章
5320浏览量
217468 -
PID
+关注
关注
37文章
1479浏览量
86998 -
PID控制
+关注
关注
10文章
461浏览量
40897 -
信号转换
+关注
关注
0文章
60浏览量
15319
原文标题:FB58(TCONT_CP)针对温度控制过程而设计(也可应用于其他控制过程)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
针对过程控制应用的温度变送器架构
TEC28V15A温度控制器,专为高效驱动TEC而设计
基于实时控制的多路温度监测系统The Multi-Chann
啤酒酵母扩培过程中温度控制系统的设计
PLC程序FB100模式控制整体分析

针对温度控制而设计的FB58(TCONT_CP)简析
MELSEC iQ L温度调节模块FB参考手册

MELSEC iQ R编程手册(过程控制FB/指令篇)
MELSEC iQ R PID控制用FB库参考手册
FB58脉冲的自整定参数的保存与重载
VASS滚床输送控制FB453

西门子PID控制算法-FB块封装


飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。

干簧继电器在RF信号衰减中的应用与优势
在电子测试领域,RF(射频)评估是不可或缺的一部分。无论是研发阶段的性能测试,还是生产环节的质量检测,RF测试设备都扮演着关键角色。然而,要实现精准的RF评估,测试设备需要一种特殊的电路——衰减电路。这些电路的作用是调整RF信号的强度,以便测试设备能够准确地评估RF组件和RF电路的各个方面。衰减器的挑战衰减器的核心功能是校准RF信号的强度。为了实现这一点,衰

ElfBoard嵌入式教育科普|ADC接口全面解析
当代信息技术体系中,嵌入式系统接口作为数据交互的核心基础设施,构成了设备互联的神经中枢。基于标准化通信协议与接口规范的技术架构,实现了异构设备间的高效数据交换与智能化协同作业。本文选取模数转换接口ADC作为技术解析切入点,通过系统阐释其工作机理、性能特征及重要参数,为嵌入式学习者爱好者构建全维度接口技术认知框架。
深入理解C语言:C语言循环控制
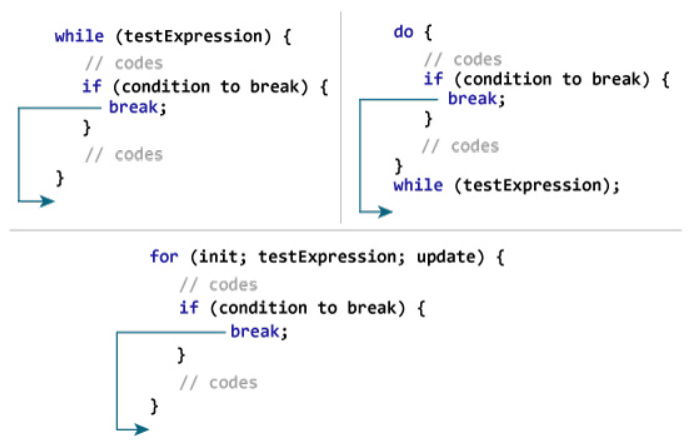
在C语言编程中,循环结构是至关重要的,它可以让程序重复执行特定的代码块,从而提高编程效率。然而,为了避免程序进入无限循环,C语言提供了多种循环控制语句,如break、continue和goto,用于改变程序的执行流程,使代码更加灵活和可控。本文将详细介绍这些语句的作用及其应用场景,并通过示例代码进行说明。Part.1break语句C语言中break语句有两种

第 21 届(顺德)家电电源与智能控制技术研讨会圆满落幕--其利天下斩获颇丰
2025年4月25日,其利天下应大比特之邀出席第21届(顺德)家电电源与智能控制技术研讨会,已圆满落幕。一、演讲回顾我司研发总监冯建武先生在研讨会上发表了主题为《重新定义风扇驱动:一套算法兼容百种电机的有效磁链观测器方案》的演讲,介绍了我司研发自适应技术算法(简称),该方案搭载有效磁链观测器,适配百种电机类型,结合FOC算法可实现免调参稳定启动、低速静音控制

来自资深工程师对ELF 2开发板的产品测评
来自资深工程师对ELF 2开发板的使用测评

飞凌嵌入式2025嵌入式及边缘AI技术论坛圆满结束
飞凌嵌入式「2025嵌入式及边缘AI技术论坛」在深圳深铁皇冠假日酒店盛大举行,此次活动邀请到了200余位嵌入式技术领域的技术专家、企业代表和工程师用户,共享嵌入式及边缘AI技术的盛宴!
常用运放电路总结记录
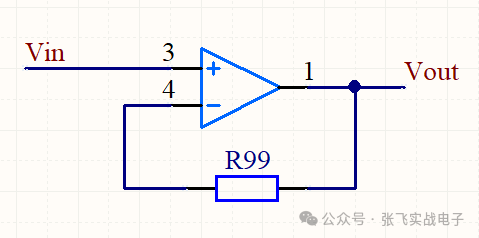
一、电压跟随器电压跟随器,电路图如下:电路分析:(本文所有的运放电路分析,V+表示运放同向输入端的电压,V-表示反向输入端的电压。)1.1电压跟随器反馈电阻需不需要?在上面的电压跟随器示例中,我画上了一个反馈电阻R99,大家在学习的运放的时候,可能很多地方也会提一下这个反馈电阻,很多地方会说可加可不加,效果一样。电阻需不需要加:但是本文这里个人建议使用电压跟
运放-运算放大器经典应用电路大全-应用电路大全-20种经典电路
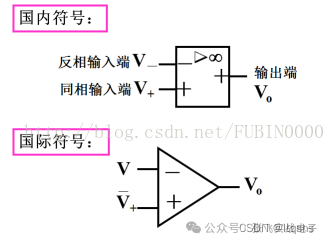
20种运放典型电路总结,电路图+公式1、运放的符号表示2、集成运算放大器的技术指标(1)开环差模电压放大倍数(开环增益)大Ao(Ad)=Vo/(V±V-)=107-1012倍;(2)共模抑制比高KCMRR=100db以上;(3)输入电阻大ri>1MW,有的可达100MW以上;(4)输出电阻小ro=几W-几十W3、集成运放分析方法(V+=V-虚短,ib-=ib





 工商网监
工商网监
评论