 基于Raspberry Pi的DIY无人机第3部分–FPV设置指南
基于Raspberry Pi的DIY无人机第3部分–FPV设置指南
这篇文章来源于DevicePlus.com英语网站的翻译稿。
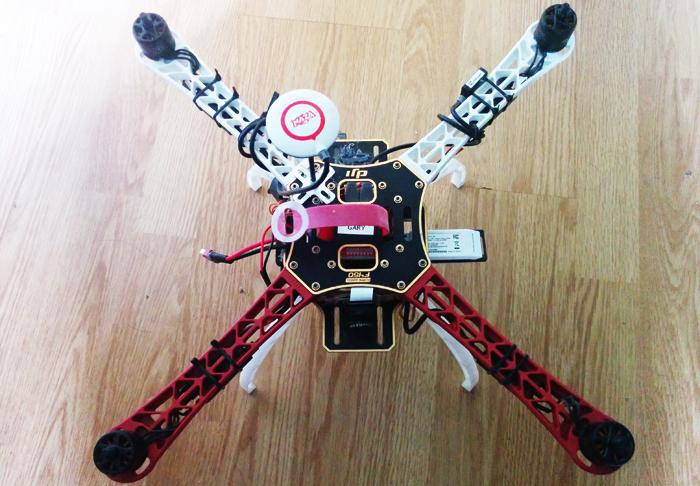
本文是我们Raspberry Pi四轴飞行器系列的最后一部分。有关本教程的其他部分,请参考《DIYRaspberry Pi无人机:机械构造–第1部分》 和 《DIYRaspberry Pi无人机第2部分-Naza-M Lite指南》。在本教程中,我们会指导您如何设置FPV。成功设置后,四轴飞行器的实时视频流通过Wifi从Raspberry Pi传输到移动设备上。本教程需要用到安卓手机,因此请准备一部可用的手机。我们还将为无人机安装螺旋桨,并在文章末尾提供一个飞行前检查清单,以确保飞行的安全成功。
飞行测试视频:
航拍视频(四轴飞行器拍摄):
硬件
第1部分组装的四轴飞行器
第1部分中的螺旋桨
安卓手机
MicroB USB 数据线
软件
Naza-M Lite Assistant (点击此处下载)
Github
工具
包含螺旋桨拧紧器的DJI Flamewheel 450套件
运行Windows系统的电脑
设置安卓手机完成 FPV
第1步:选择Raspberry Pi的FPV实现方式
无人机上Raspberry Pi的视频通过WiFi热点发送到Android手机。目前,我只总结了如何在Android手机上设置FPV视频流。承载WiFi热点的方式有三种:
手机和四轴飞行器都连至地面路由器
您可以使用发射功率较大的WiFi路由器,这意味着信号覆盖的范围更大。然而,该方案最大的缺点是,飞行时您得带着这个路由器,并且路由器还得需要单独电源,这又增加了飞行时必须携带的装备数量。
手机连至Raspberry Pi上承载的WiFi热点
该解决方案似乎很理想,因为它可以与任何观察设备一起工作,不管是否能够承载WiFi热点。然而,根据我的经验,这种方法的缺点是很难在WiFi无线网卡上启用接入点(Access Point)模式。
Raspberry Pi连至手机承载的WiFi热点
手机上的WiFi热点不需要WiFi路由器和额外的电源,确定WiFi热点变得非常容易。大多数安卓手机都可以在几分钟内创建一个WiFi热点。
第2步:在安卓手机上设置WiFi热点
示例中使用的是运行Android 6.0.1的Nexus 5手机。其实,系统是Android 2.2及以上版本的任何手机(现在的所有手机几乎都是)都应支持WiFi热点功能。
注:根据手机制造商的不同,下文显示的具体步骤菜单可能会有所不同。
要设置WiFi热点,请先打开设置应用程序。您应该会看到与下图类似的菜单。
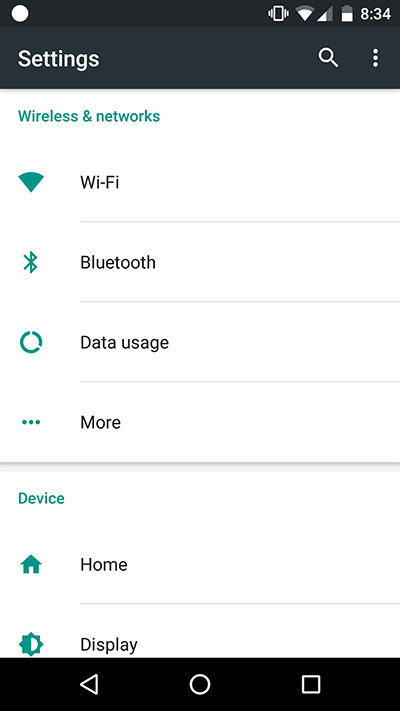
图1.安卓设置菜单
在Wireless & networks(无线和网络)菜单下,单击More(更多)选项。同样,您应该会看到与下图类似的菜单。
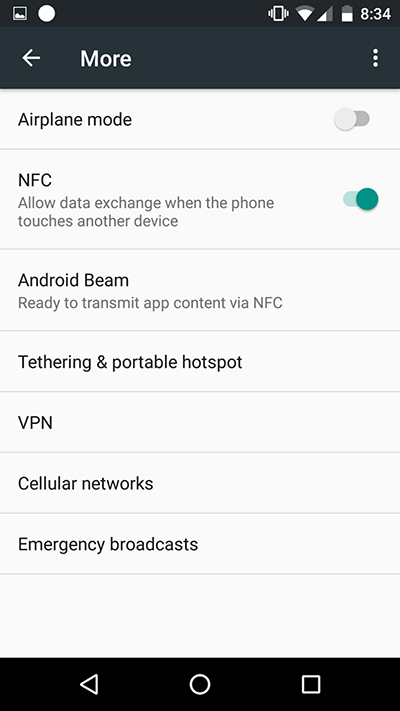
图2.网络设置
进入Tethering & portable hotspot(网络共享和便携式热点) 菜单,您会看到以下选项。在此菜单中,单击Setup Wi-Fi hotspot(设置Wi-Fi热点),开始配置WiFi热点。
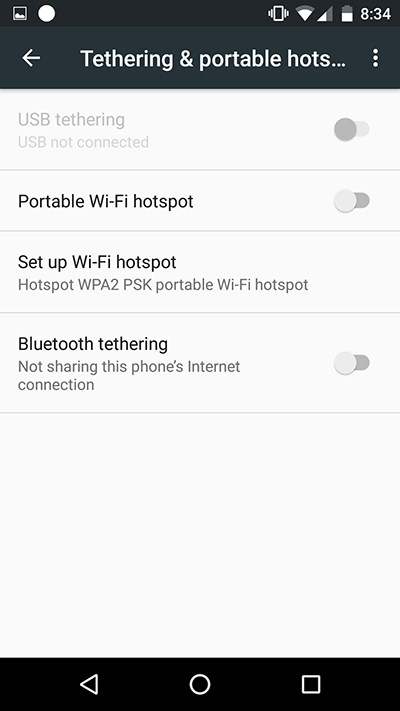
图3.热点菜单
现在,我们填写相应的字段来配置手机WiFi网络的名称、安全性和频段。名称请自行定义。
为了确保网络只让我们的无人机和自己访问,我们将安全性 设置为“WPA2 PSK”,将密码设置为“deviceplus”。
最后一个字段Select AP Band(选择AP频段)非常重要。该字段指定WiFi热点使用的频段。我们有两种选择:2.4 GHz频段和5 GHz频段。我们应使用5 GHz频段,这一点非常重要。这是因为我们的RC接收器(本系列教程第1部分安装的设备)用的就是2.4 GHz频段,如果在同一频段上同时运行热点和RC接收器会增加相互干扰的机率,从而使您失去对无人机的控制。
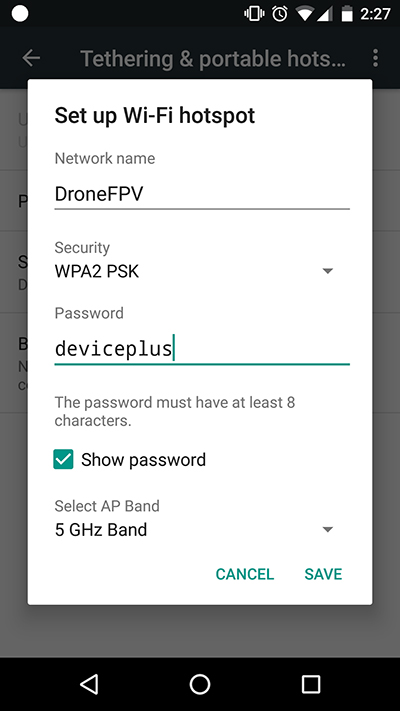
图4.WiFi热点配置
所有字段输入完成后,单击 SAVE,WiFi热点配置完成!现在,只要点击Portable Wi-Fi 热点右侧的滑块(请参见图2),就可以启用该热点。
第3步:安装Raspberry Pi Camera Viewer应用程序
我们还需要一个特殊的应用程序来从相机传入手机的视频流显示出来。本文中使用的应用程序是RaspberryPi Camera Viewer。请从以下网址(Google Play商店)下载该应用程序并将其安装到您的手机上:https://play.google.com/store/apps/details?id=pl.effisoft.rpicamviewer2。
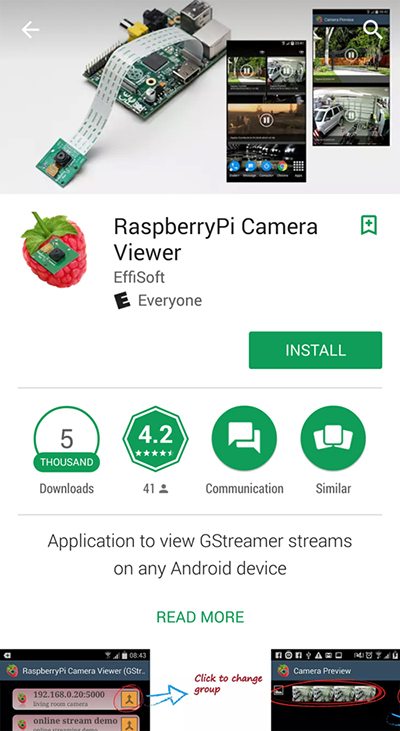
图5.Google Play上的RaspberryPi Camera Viewer
第4步:设置Raspberry Pi Camera Viewer应用程序
手机上安装Raspberry Pi Camera Viewer之后,就要设置该应用程序了。首次启动该应用程序后,您会看到一个近乎空白的界面,如下图所示。
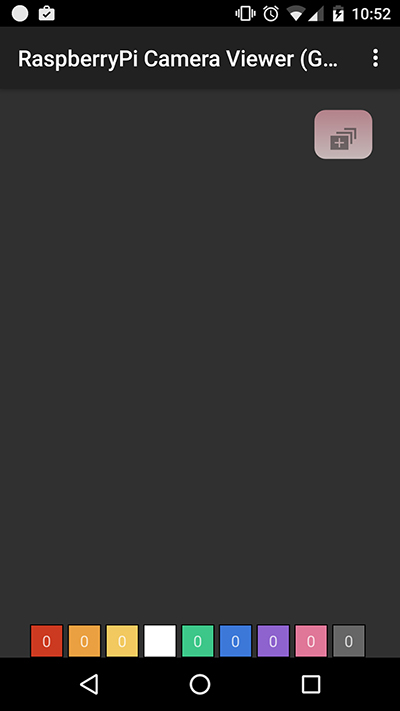
图6.首次打开live streaming程序
开始根据我们的需求设置该应用程序,请单击右上角附近的(+)按钮。通过此按钮我们可以创建一个新的配置文件。单击该按钮,系统会弹出一个通道编辑菜单。

图7.默认的通道编辑接口
我们需要更改许多选项。首先,请勾选Enable advanced mode旁边的复选框以访问更多设置。然后将名称更改为QuadcopterFPV或类似的描述性名称。现在,我们必须进行最重要的一个设置——通道描述。通道描述的作用是告诉应用程序如何对传入的视频流进行解码(如果您想了解更多信息,请参阅GStreamerPipeline)。
请将包含以下内容的字段:
tcpclientsrc host=0.0.0.0 port=5000 ! gdpdepay ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false
替换为:
udpsrc port=9000 ! gdpdepay ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false
这两个通道描述之间的唯一区别是我们的新通道描述用的是UDP而不是TCP。我们使用UDP是因为其视频延迟较少,且视频流可以更好地处理丢帧或信息丢失状况。
我们必须配置的最后一个选项是Enable application extra features。请勾选该选项旁边的复选框。这能够让我们在飞行过程中对视频画面截图,这很有用。
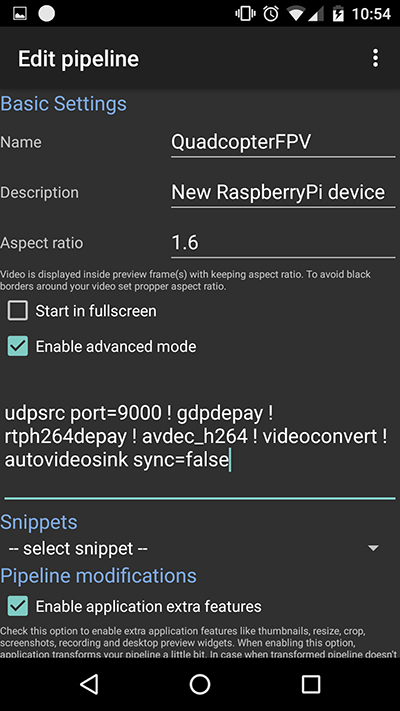
图8.最终设置
调整所有设置后,滚动至应用程序底部,然后单击SAVE按钮即可保存所有更改。在接下来的步骤中,我们将设置Raspberry Pi链接至热点,用于摄像头以及传输视频等功能。
为FPV设置Raspberry Pi
为了简化Raspberry Pi的配置,我创建了一个Raspbian镜像,可以轻松为FPV安装Raspberry Pi。您可以在此处下载我自定义的最新版Raspbian镜像:https://github.com/brenton311/drone-files/releases/download/v0.1/image.zip。
要安装此镜像,您必须解先提取zip文件,然后按照Raspberry Pi上最新的操作系统说明进行操作:https://www.raspberrypi.org/documentation/installation/installing-images/。
安装完成后,装上电池,Raspberry Pi就会将视频流传输到手机上(Raspberry Pi大约需要40秒钟才能完成启动,因此视频不会立即显示在屏幕上)。
试飞/如何飞行无人机
第1步:学习每个控制杆和开关的用途

图9.发射器上标记出的相关联的控制杆
油门(控制杆1:垂直轴)
油门控制电机的速度。油门越大,电机旋转越快;油门越低,电机旋转越慢。通常,油门从零加到一半时,四轴飞行器会悬停在空中(不向上或向下移动)。油门低于50%时,飞行器会下降;油门高于50%时,飞行器会上升。
方向舵/偏航杆(控制杆1:水平轴)
方向舵杆控制四轴飞行器在偏航轴中旋转的速率。当方向舵杆在中心时,四轴飞行器不会旋转。方向舵杆向右,四轴飞行器将顺时针旋转;方向舵杆向左,四轴飞行器将逆时针旋转。
升降舵/俯仰杆(控制杆2:垂直轴)
升降舵杆控制四轴飞行器沿俯仰轴偏转的角度。将升降舵杆推离自己,无人机会向前倾斜;将升降舵杆拉近自己,无人机会向后倾斜。
副翼/旋转杆(控制杆2:水平轴)
副翼杆控制四轴飞行器沿旋转轴偏转的角度。副翼杆向右,无人机会向右倾斜;副翼杆向左,无人机会向左倾斜。当升降舵杆和副翼杆都归于中心时,四轴飞行器保持水平。
方向锁(控制杆3)
这个三向开关可以在三种方向锁定模式之间切换(关闭、航向锁定和返航点锁定),我们在之前的NAZA配置步骤中已经讨论过了。
飞行模式开关(控制杆4)
这个三向开关可设定飞行模式。我们为能够在三种飞行模式中切换而配置NAZA:GPS ATTI, ATTI, and FAILSAFE(GPS姿态、姿态和故障保护)。我们已经在NAZA 配置步骤中讨论了每种飞行模式的功能。
第2步:创建一份飞行前检查清单
飞行四轴飞行器时,会发生许多意外。为了防止出现低级错误,我建议您制作一个飞行前检查清单。驾驶四轴飞行器前,我要检查以下项目:
确保螺旋桨已拧紧且安装方向正确
确保电池已经充满电
检查无人机是否存在任何物在·损坏(比如机身开裂、导线未连等)
确保发射器的电池电压符合要求
确保您所处的区域能够合法、安全地驾驶四轴飞行器
请务必彻底了解您的四轴飞行器、其飞行特性、控制方式以及出现问题时的处理方法
等待NAZA LED显示绿色,再起飞四轴飞行器。
第3步:学习基本飞行技巧
请始终让将四轴飞行器的前端指向远离您的位置(如果需要,请使用方向锁定):如果未启用方向锁定,那么所有旋转和俯仰命令都会以四轴飞行器的指向方向而定。无法分辨四轴飞行器的指向可能会导致坠毁,因为您的命令将不会按照您认为的执行。
油门加到50%时悬停:理想情况下,四轴飞行器的推力重量比为2:1,因此油门加到约50%时会悬停。如果您发现四轴飞行器悬停时的油门数值显著偏高(比如大于70%),那么可能是四轴飞行器太重了——请尝试减少负载或使用功率更大的电机。
切勿过度反应:四轴飞行器上的控件都很灵敏,而且四轴飞行器可以飞的很快。如果未按预期方向飞行,请缓慢而安全地小幅调整旋转杆及俯仰杆。
第4步:请始终安全地驾驶四轴飞行器[重要!]
请始终遵守您所在地区与无人机(无人航拍机)相关的所有适用法律!DevicePlus和本系列文章的作者对由于组装或使用此无人机造成的人员或财产损失不承担任何责任。无人机可能会非常危险!请合法、安全地操作您的无人机。
如果您是新手,请做好无人机坠毁的心理准备。
切勿过度消耗电池电量。
请在远离人员、汽车或其他建筑物的空旷区域(田野、大型公园)飞行。
请勿在机场附近飞行(请咨询适用法律,以了解机场的禁飞半径)
切勿让四轴飞行器脱离视线范围或在夜间飞行
第5步:电池充电
尝试为电池充电之前,请参阅本系列第1部分中有关电池规格和正确保养的重要信息:《DIYRaspberry Pi无人机:机械构造–第1部分》。您也可以点击此处查看有关LiPo电池的指南。
配置和使用LiPo电池充电器的确切步骤因每个充电器而异,但是通常必须:
确保将充电器设置为LiPo模式(许多充电器支持多种化学成分的电池)
将电池电压设置为3S(如果使用其他电池请做相应更改)
将电池容量设置为3300mAh(如果使用其他电池请做相应更改)
充电电流可以保持默认值(通常为1C)
将电池引线按照正确极性连至充电器
将电池的平衡导线连至平衡充电器
给电池充电时,请远离任何易燃材料(建议在室外充电)
充电时请监控电池,以确保其不会膨胀、冒烟或剧烈发热。如果发现有任何这种迹象,请立即停止充电并将电池移至远离易燃材料的室外。
第6步:安装螺旋桨
与四轴飞行器的顺时针电机和逆时针电机一样,螺旋桨也有顺时针和逆时针之分。每个顺时针电机必须于顺时针螺旋桨配对,而逆时针电机必须与逆时针螺旋桨配对。电机的方向可以通过查看电机侧面的箭头来确定。螺旋桨的方向可以通过查看螺旋桨中间的颜色来确定。中间是黑色的螺旋桨与顺时针电机配对,中间是银色的螺旋桨与逆时针电机配对。

图10.逆时针螺旋桨(上)和顺时针螺旋桨(下)
要将螺旋桨安装在电机上,只需将螺旋桨中心的底部(您会看到一个螺纹孔)装在电机轴上。然后,用螺旋桨拧紧器固定电机,并沿与旋转方向相反的方向旋转螺旋桨,直到感觉到明显的阻力。此时,请用两根手指将螺旋桨固定在中心位置并防止其旋转,然后用螺旋桨拧紧器旋转电机,锁紧螺旋桨。
第7步:从万向节上取下Xiaomi Yi相机
作为飞行新手,您坠毁四轴飞行器的几率很大。四轴飞行器坠毁时可能会损坏组件。这就是为什么我建议拆下万向节和相机的原因——为了防止坠机时损坏昂贵的组件。
要从万向节上拆下相机,请松开将相机固定在万向节上的两颗螺丝,然后将相机滑出支架,并取下相机。

图11.安装在万向节中的XiaomiYi相机(请注意两个螺丝的位置)
第8步:从框架上卸下万向节
要从框架上卸下万向节,请从将其固定到框架上的四个螺栓上拆下螺母。同时,请确保万向节不会掉落:一只手握住万向节,另一只手松开螺栓。卸下四个螺母后,万向节就可简单地滑出框架。
第9步:校准指南针
校准指南针是一个可选步骤,该步骤可以让四轴飞行器在GPS模式下更稳定。
请参考下面的分步校准指南[在GPS模式下]。
校准程序 – DJI Wiki
开启发射器,然后打开自动驾驶系统!
2快速将控制模式从手动模式切换到GPSATTI,然后再切换回手动模式,来回6至10次,LED指示灯将持续亮黄灯。
3水平放置四轴飞行器,围绕重力线旋转机器(大约360度),直到LED变为恒定绿色,然后进行下一步。
图12.水平放置四轴飞行器 / ©DJI Wik
保持四轴飞行器垂直,围绕重力线(大约360度)旋转(机头朝下),直到LED熄灭,这表示校准完成。
图13.保持四轴飞行器垂直 / ©DJI Wiki
校准成功后,自动退出校准模式。如果LED持续快速闪烁红色,那么表明校准失败。切换一次控制模式开关,取消校准,然后从步骤2重新开始。
注:您无需在精确的水平或垂直表面上旋转多旋翼飞行器,但水平和垂直校准之间至少要保持45°的差异。
重新校准的条件:
飞行区域发生变化。
多旋翼机械设置发生变化时:
a) GPS/指南针模块重新定位。
b) 添加/移除/重新放置了电子设备(主控制器、伺服器、电池等)。
c) 多旋翼的机械结构发生变化。
如果飞行方向似乎正在发生变化(比如多旋翼飞行器无法“直线飞行”)。
当多旋翼飞行器旋转时,LED经常指示异常闪烁。(如果这种情况偶尔发生是正常的)。
第10步:准备好进行第一次飞行
我们将通过四轴飞行器的首飞来测试四轴飞行器的每个组件是否正常工作,并让您熟悉四轴飞行器的各个控制部件。飞行之前,请确保:
将无人机放置在距离您至少10米的大空地上
务必遵守上述所有安全预防措施
按照飞行前检查清单实施检查
将四轴飞行器的前端远离您
放入电池
第11步:四轴飞行器的首飞
对于第一次飞行,请控制好四轴飞行器(发射器底角的两个控制杆尽可能地保持在中心位置),然后缓慢加大油门,直到飞行器起飞。小心控制(切勿快速移动)四轴飞行器的油门,直到设备高度达到约10英尺。当四轴飞行器达到10英尺高度时,将油门归位到中点。
请缓慢地前后或左右移动四轴飞行器,从而熟悉升降舵和副翼的控制。随着飞行技能的提高,您会意识到四轴飞行器的所有运动都是由升降舵、副翼和偏航命令控制的。
几分钟后,您可以使用副翼和升降舵操纵杆将四轴飞行器引导至您要着陆的位置。然后慢慢减小油门,直到四轴飞行器停在地面上。四轴飞行器下降时,您可能需要稍微调整下升降舵和副翼操纵杆,以便让四轴飞行器着陆在预定的位置。
第12步:学习更多的飞行技术
本教程到此结束,以后的飞行技术您需要自己学习了。本文的目的是向您展示如何配置无人机,使其准备就绪进行飞行,而不是教您如何飞行无人机。如果您想要深入学习四轴飞行器的飞行技能,我建议您参考这里的优秀指南。

Brenton Sutherland
Brenton目前就读于滑铁卢大学软件工程专业,拥有多年C++和Python编程经验,并且开发过多个Raspberry Pi和Arduino项目。
审核编辑黄宇
-
无人机
+关注
关注
230文章
10665浏览量
185091 -
Raspberry Pi
+关注
关注
2文章
616浏览量
22812
发布评论请先 登录
无人机类型之植保无人机,带你了解什么是植保无人机?
超声波传感可用于无人机应用的原因
【开源项目】使用 Blues Swan 3.0 制作的的 DIY 无人机
大疆正式发布全新产品DJI FPV无人机
大疆发布沉浸式飞行无人机DJI FPV
基于Raspberry Pi的4G无人机
一款用Raspberry Pi和传感器制作的可穿戴式小型健康管理设备!第四部分•剧终篇
用Raspberry Pi和传感器制作“可自动营造舒适空间的装置” 第四部分•剧终篇
通过Twython在Raspberry Pi上发推文!(第2部分)
使用Crystal Signal Pi第3部分:使用Raspberry Pi创建警示灯解决方案—创建工具

使用Raspberry Pi 3自制智能相框和日历—第二部分
DIYRaspberry Pi无人机第二部分–Naza-M Lite指南
DIY Raspberry Pi 无人机:机械构造–第一部分

基于Raspberry Pi和通用Windows平台(UWP)的无人机


智能家居中的清凉“智”选,310V无刷吊扇驱动方案--其利天下
炎炎夏日,如何营造出清凉、舒适且节能的室内环境成为了大众关注的焦点。吊扇作为一种经典的家用电器,以其大风量、长寿命、低能耗等优势,依然是众多家庭的首选。而随着智能控制技术与无刷电机技术的不断进步,吊扇正朝着智能化、高效化、低噪化的方向发展。那么接下来小编将结合目前市面上的指标,详细为大家讲解其利天下有限公司推出的无刷吊扇驱动方案。▲其利天下无刷吊扇驱动方案一
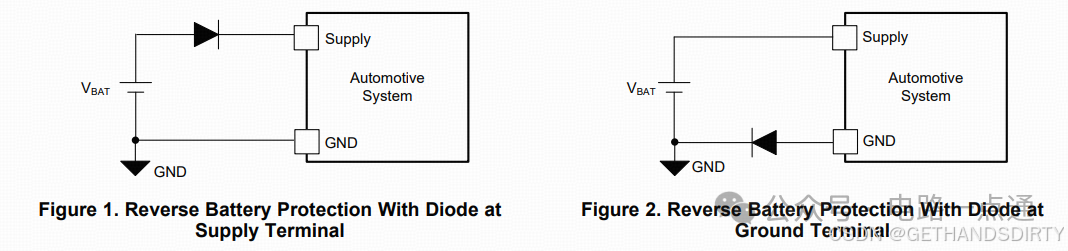
电源入口处防反接电路-汽车电子硬件电路设计
一、为什么要设计防反接电路电源入口处接线及线束制作一般人为操作,有正极和负极接反的可能性,可能会损坏电源和负载电路;汽车电子产品电性能测试标准ISO16750-2的4.7节包含了电压极性反接测试,汽车电子产品须通过该项测试。二、防反接电路设计1.基础版:二极管串联二极管是最简单的防反接电路,因为电源有电源路径(即正极)和返回路径(即负极,GND),那么用二极
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
硬件设计基础----运算放大器
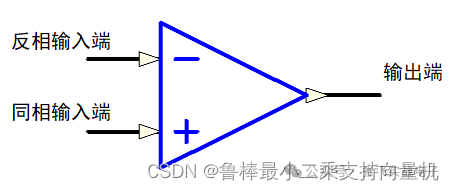
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
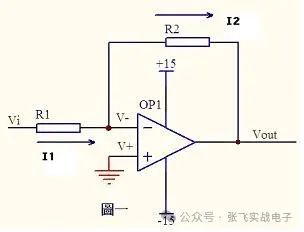
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
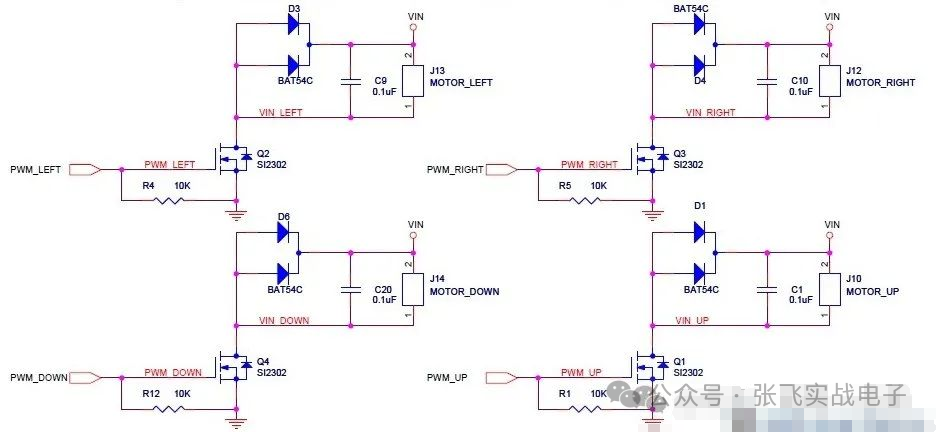
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。





 工商网监
工商网监
评论