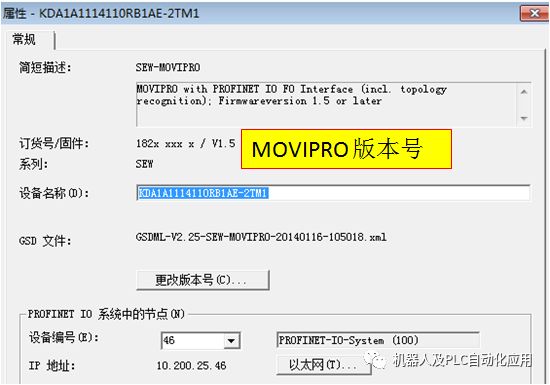
 生降位的电机控制-SEW-MOVIPRO
生降位的电机控制-SEW-MOVIPRO
升降滚床和转台的控制多使用MOVIPRO,多采用AMA0801控制模块.

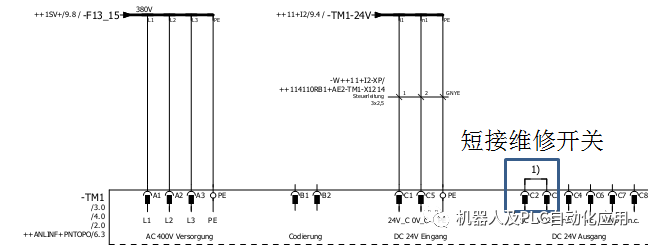
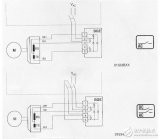
硬线图纸介绍:
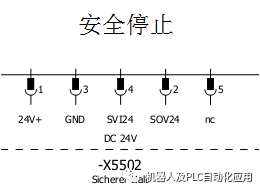
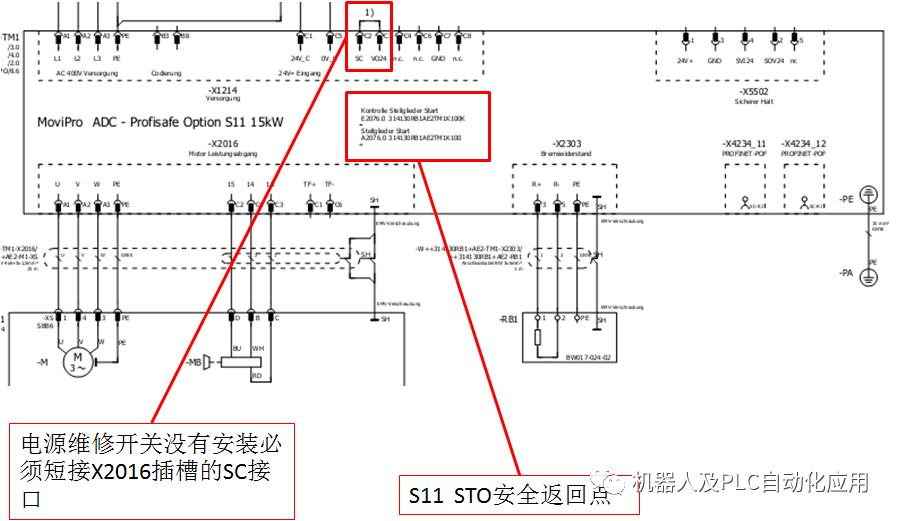
安全点的使用,E0.0STO安全使能,A0.0电源控制反馈
-----------
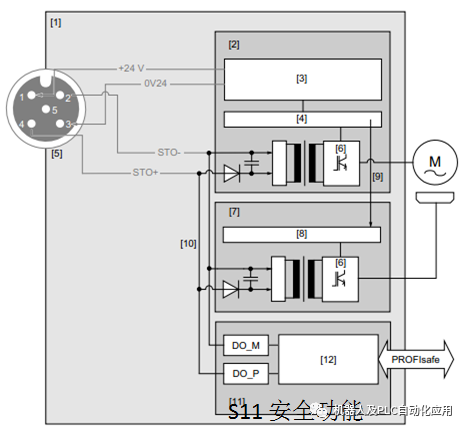
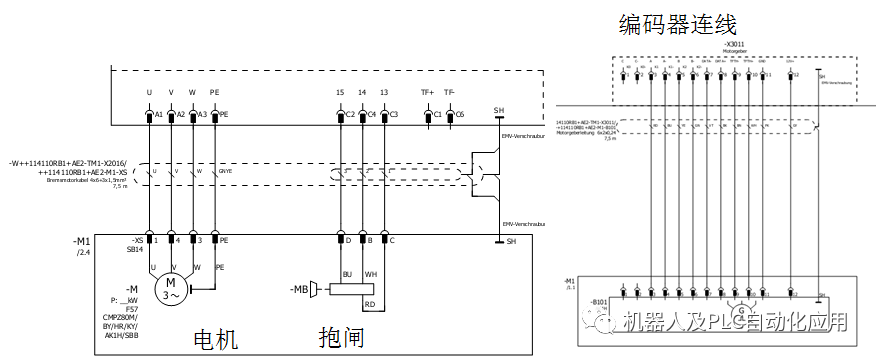
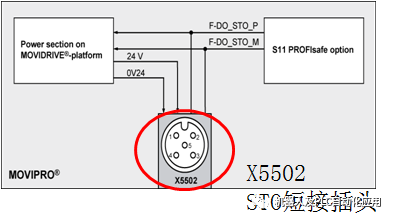
•X5520-STO安全点直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。
•S11安全模块单元直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。
•SEW变频器MOVIPRO的S11功能与X5520-STO安全点不能同时使用,也是直接控制电机是否得电,以及关闭电机抱闸的电。
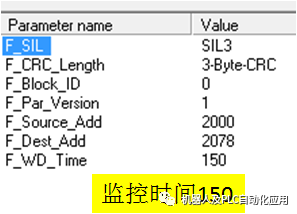
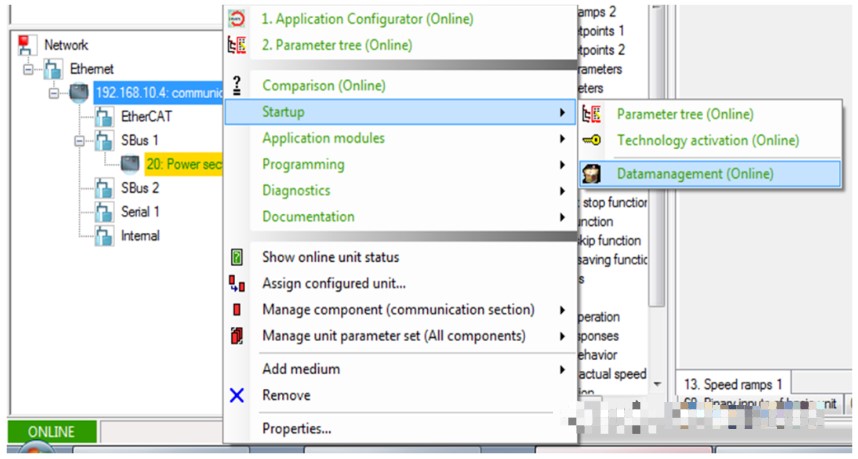
安全地址的设置:

安全地址长度2BYTE,后面2个字的长度没用。
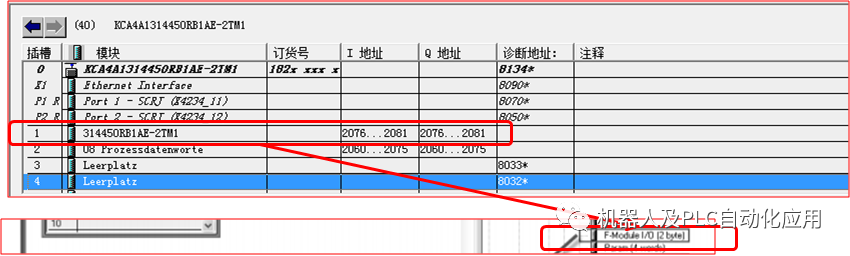

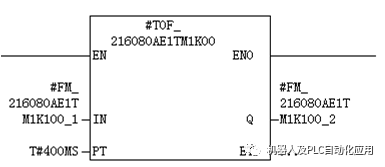
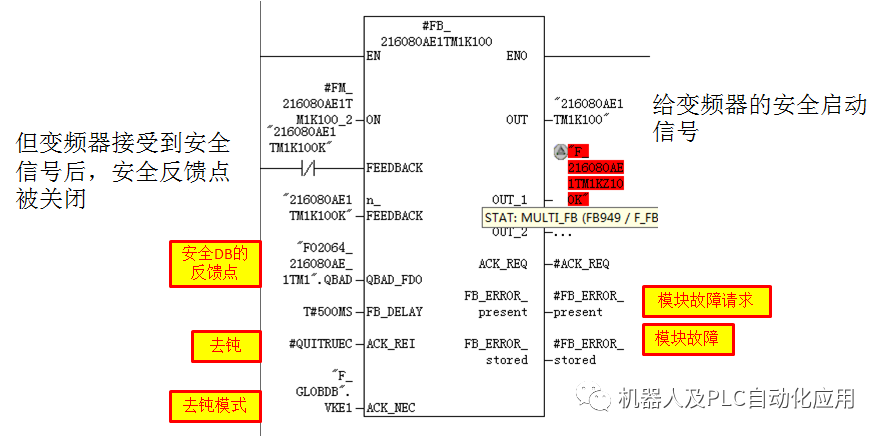
硬件组态部分:


延时关断启动变频器安全信号
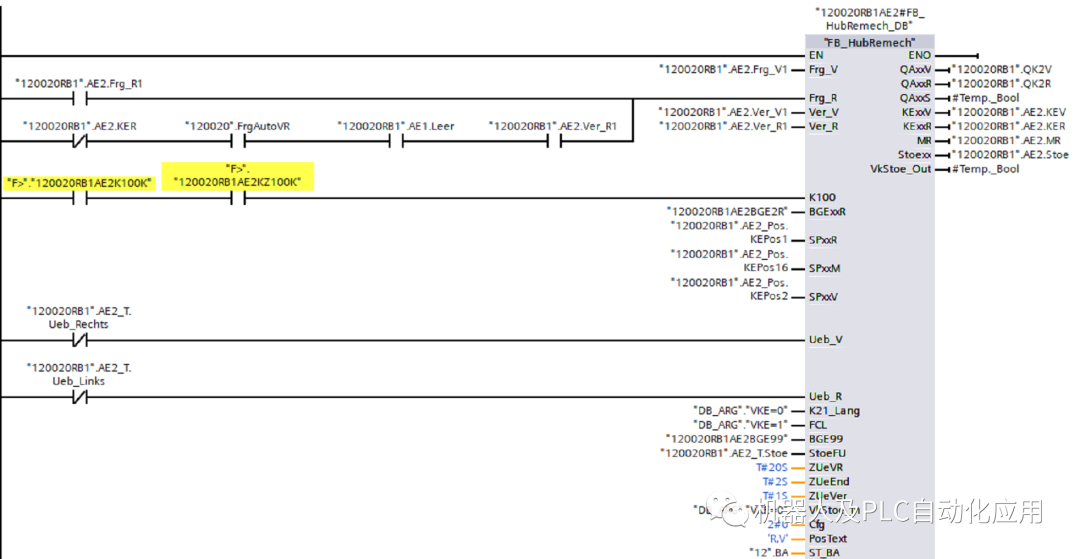
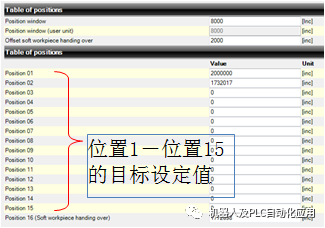
通过AMA0801的二进制设定)表格定位实现位置控制



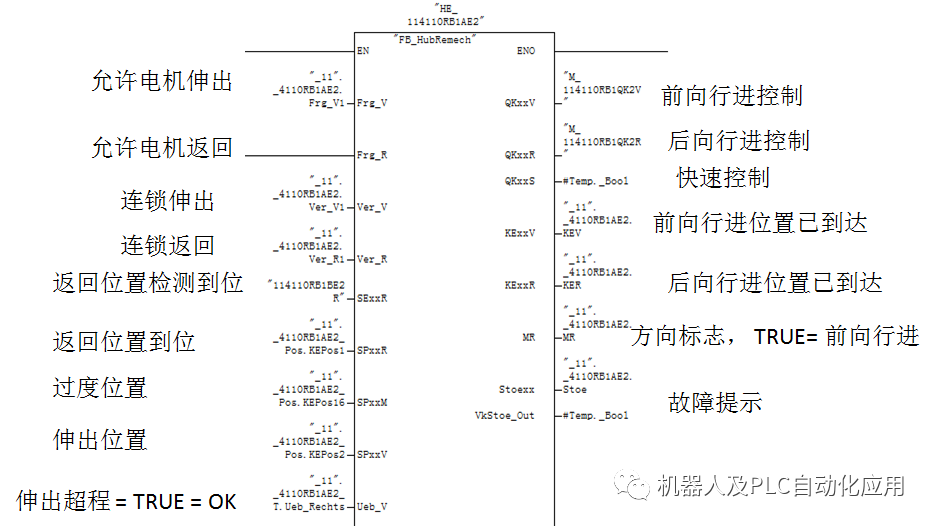
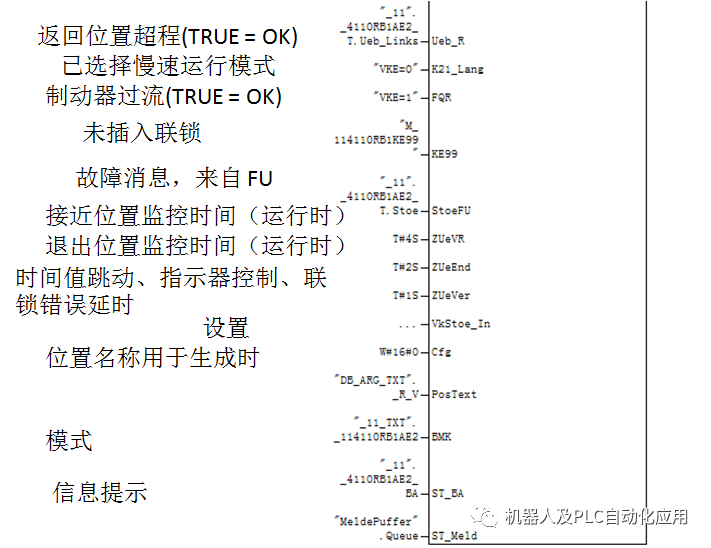
视以下错误类型:
启用故障:如果同时挂起多个启用(仅在“自动”模式下),则显示错误消息。
故障,结束位置指示灯控制:如果同时有多个结束位置挂起,则显示错误消息。时间延迟“ZUeVer”已到位。
结束位置退出而没有控制:如果结束位置退出时没有挂起启用信号,则会生成错误消息。时间延迟“ZUeVer”已到位。
结束位置未退出:如果结束位置在挂起控制的情况下未退出,则会生成错误消息。时间延迟“ZUeEnd”已到位。
时间监控,向前移动:如果在“ZUeVR”监控时间内未到达位置,则会生成错误消息。
时间监控,向后移动:如果在“ZUeVR”监控时间内未到达位置,则会生成错误消息。
联锁故障:如果在没有相应联锁条件挂起的情况下,块上的启用挂起,则会生成错误消息。时间延迟“TVer”已到位。
故障,到达前端位置:如果输入为FALSE,则会生成错误消息。然后,驱动器只能在激活E7桥接的情况下沿相反方向缩回。
故障,末端位置向后到达:如果输入为FALSE,则会生成错误消息。然后,驱动器只能在激活E7桥接的情况下沿相反方向缩回。
电机保护故障:如果输入为FALSE,则会生成错误消息。
电机温度故障:如果输入为FALSE,则会生成错误消息。
联锁故障:如果插入联锁,则会生成错误消息(输入为FALSE)。
表格定位模式是位置已经在AMA0801里编好,通过位置号直接调用
输出控制:
处于“自动”模式期间,如果没有未决故障且相应联锁条件已经满足,则触发这些输出。
处于“ 手动” 模式期间,如果没有未决故障且所需动作按钮和相应联锁条件处于活跃状态,则触发
这些输出。出现“末位位置已到达” 故障后,只能采用活跃的 E7桥接功能让驱动装置反向回退至
已经激活的过行程位置。
如果已经满足“ 手动” 或“ 自动” 控制条件,驱动装置将一直运行,直至收到停止消息或者到达末位
位置。设置停止消息时,必须让驱动装置停止运动时可以激活 "In_Pos" 凸轮。
驱动装置若因故障或其它原因而停止运动,则该驱动装置当且仅当全部行进条件都恢复后再慢
速行进至目标位置。
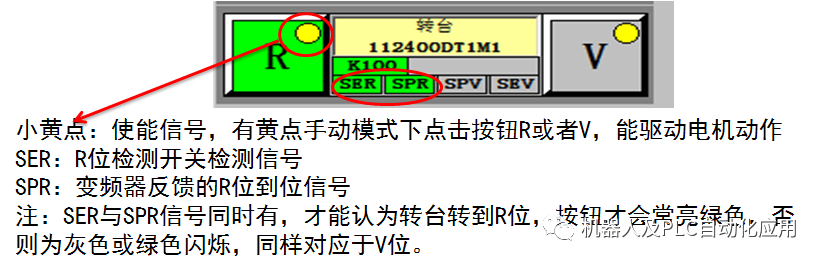
WINCC 操作按钮的连锁信号
dwVisuWerte1.X24 := Ver_RAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
返回连锁显示条件:返回连锁条件,手动工作模式,自动工作模式
dwVisuWerte1.X25 := Ver_VAND (ST_BA.K25_FrHand OR ST_BA.K26_FrAuto);
伸出连锁显示条件:伸出连锁条件,手动工作模式,自动工作模式
审核编辑 :李倩
-
电机控制
+关注
关注
3561文章
1938浏览量
270798 -
变频器
+关注
关注
253文章
6766浏览量
148132 -
安全模块
+关注
关注
0文章
13浏览量
6718
原文标题:生降位的电机控制-SEW-MOVIPRO
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
如何将SEW变频器数据保存到存储卡里呢
回收SEW编码器
徐州回收SEW编码器公司
SEW电机结构及技术参数

SEW-MOVIPRO启动应用程序配置程序设置步骤
SEW-movifit变频器的VR控制应用分析

浅谈SEW伺服电机的基础知识

SEW-MOVIPRO启动应用程序配置程序

MOVIPRO:电机初始化Starting up the motor encoder
走进SEW电机智能工厂!
半导体芯片需要做哪些测试
首先我们需要了解芯片制造环节做⼀款芯片最基本的环节是设计->流片->封装->测试,芯片成本构成⼀般为人力成本20%,流片40%,封装35%,测试5%(对于先进工艺,流片成本可能超过60%)。测试其实是芯片各个环节中最“便宜”的一步,在这个每家公司都喊着“CostDown”的激烈市场中,人力成本逐年攀升,晶圆厂和封装厂都在乙方市场中“叱咤风云”,唯独只有测试显

解决方案 | 芯佰微赋能示波器:高速ADC、USB控制器和RS232芯片——高性能示波器的秘密武器!
示波器解决方案总述:示波器是电子技术领域中不可或缺的精密测量仪器,通过直观的波形显示,将电信号随时间的变化转化为可视化图形,使复杂的电子现象变得清晰易懂。无论是在科研探索、工业检测还是通信领域,示波器都发挥着不可替代的作用,帮助工程师和技术人员深入剖析电信号的细节,精准定位问题所在,为创新与发展提供坚实的技术支撑。一、技术瓶颈亟待突破性能指标受限:受模拟前端
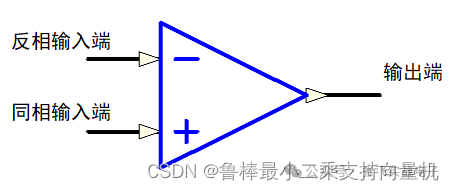
硬件设计基础----运算放大器
1什么是运算放大器运算放大器(运放)用于调节和放大模拟信号,运放是一个内含多级放大电路的集成器件,如图所示:左图为同相位,Vn端接地或稳定的电平,Vp端电平上升,则输出端Vo电平上升,Vp端电平下降,则输出端Vo电平下降;右图为反相位,Vp端接地或稳定的电平,Vn端电平上升,则输出端Vo电平下降,Vn端电平下降,则输出端Vo电平上升2运算放大器的性质理想运算

ElfBoard技术贴|如何调整eMMC存储分区
ELF 2开发板基于瑞芯微RK3588高性能处理器设计,拥有四核ARM Cortex-A76与四核ARM Cortex-A55的CPU架构,主频高达2.4GHz,内置6TOPS算力的NPU,这一设计让它能够轻松驾驭多种深度学习框架,高效处理各类复杂的AI任务。
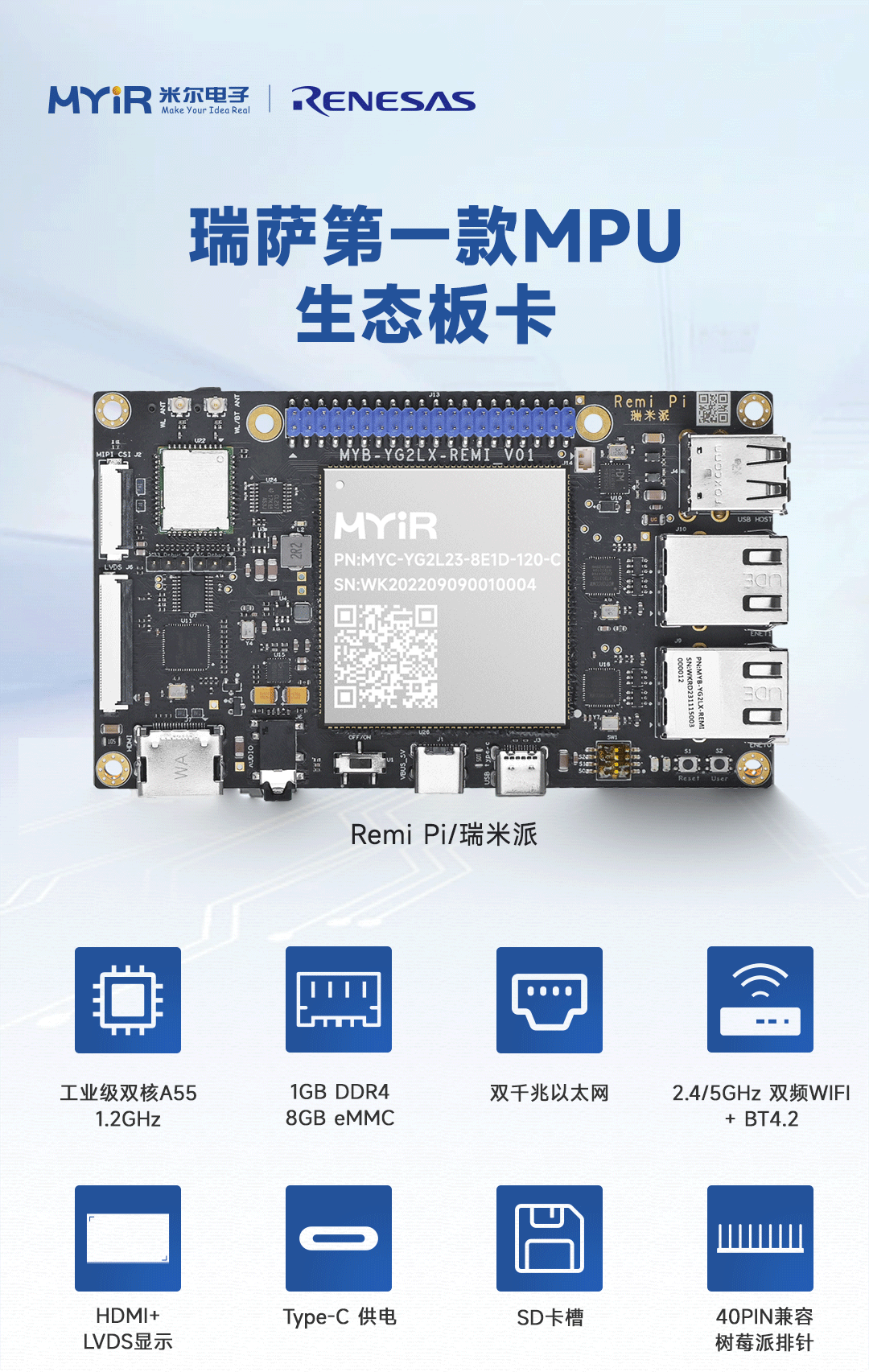
米尔基于MYD-YG2LX系统启动时间优化应用笔记
1.概述MYD-YG2LX采用瑞萨RZ/G2L作为核心处理器,该处理器搭载双核Cortex-A55@1.2GHz+Cortex-M33@200MHz处理器,其内部集成高性能3D加速引擎Mail-G31GPU(500MHz)和视频处理单元(支持H.264硬件编解码),16位的DDR4-1600/DDR3L-1333内存控制器、千兆以太网控制器、USB、CAN、
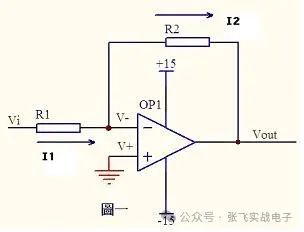
运放技术——基本电路分析
虚短和虚断的概念由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80dB以上。而运放的输出电压是有限的,一般在10V~14V。因此运放的差模输入电压不足1mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。“虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称

飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
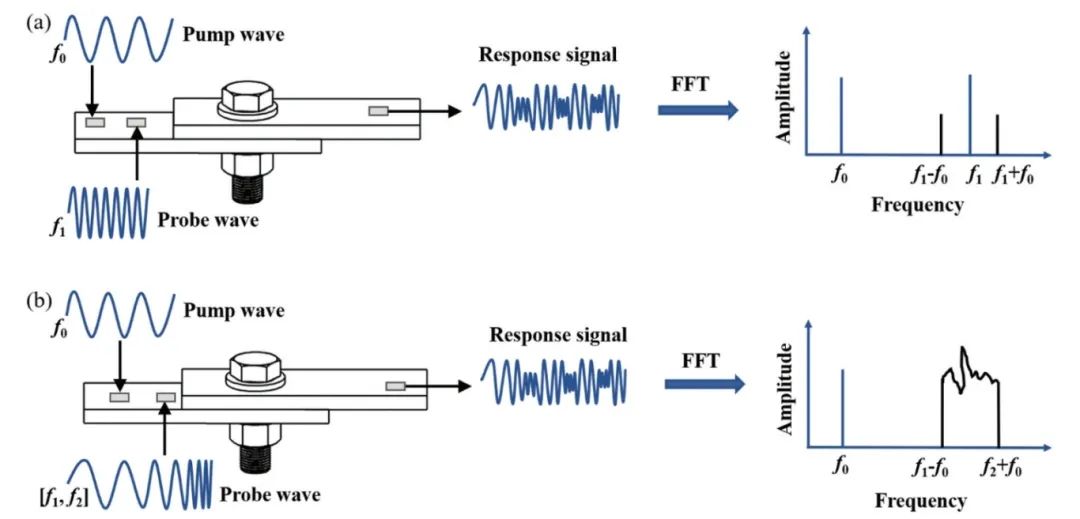
ATA-2022B高压放大器在螺栓松动检测中的应用
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
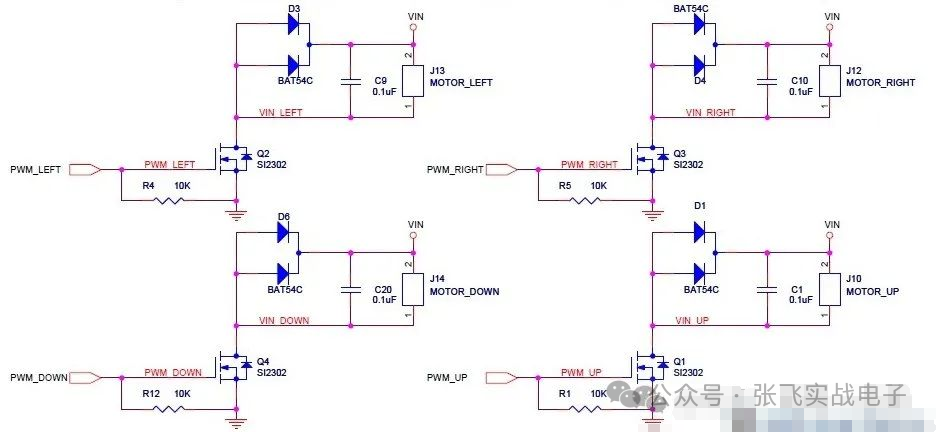
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
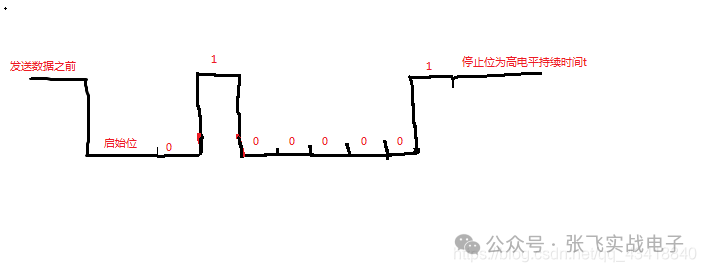
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。

干簧继电器在RF信号衰减中的应用与优势
在电子测试领域,RF(射频)评估是不可或缺的一部分。无论是研发阶段的性能测试,还是生产环节的质量检测,RF测试设备都扮演着关键角色。然而,要实现精准的RF评估,测试设备需要一种特殊的电路——衰减电路。这些电路的作用是调整RF信号的强度,以便测试设备能够准确地评估RF组件和RF电路的各个方面。衰减器的挑战衰减器的核心功能是校准RF信号的强度。为了实现这一点,衰

ElfBoard嵌入式教育科普|ADC接口全面解析
当代信息技术体系中,嵌入式系统接口作为数据交互的核心基础设施,构成了设备互联的神经中枢。基于标准化通信协议与接口规范的技术架构,实现了异构设备间的高效数据交换与智能化协同作业。本文选取模数转换接口ADC作为技术解析切入点,通过系统阐释其工作机理、性能特征及重要参数,为嵌入式学习者爱好者构建全维度接口技术认知框架。





 工商网监
工商网监
评论