 探讨传感器在工业机器人中的应用
探讨传感器在工业机器人中的应用
在工业自动化领域,机器需要传感器提供必要的信息,以正确执行相关的操作。机器人已经开始应用大量的传感器以提高适应能力。绝大多数智能机器人的外部传感器,可以大致分为触觉传感器,接近传感器、力学传感器,以及视觉、滑觉、热觉等多种类型的传感器。例如有很多的协作机器人集成了力矩传感器和摄像机,以确保在操作中拥有更好的视角,同时保证工作区域的安全等。
用于避障的传感器
避障可以说是各种机器人最基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。
最典型的接触式测障传感器便是碰撞开关。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。
在机器人上的用法多数是将探测臂加长,扩大探测范围和灵敏度。当机器人撞到前面的障碍物,碰撞开关的信号端便可返回一个高电平,控制芯片由此可以知道小车面前存在着障碍物。
非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。我们最常用的便是发射和接收红外线的传感器。
红外测障传感器成本较低(当然比碰撞开关还是要高一点),电路简单,检测范围大。如果在电路中加上一个电位器,就可以随时调节传感器的检测范围。这种检测方式为非接触式,控制起来更加方便、灵活。但这种测障方式也有缺点,多个红外传感器之间容易互相干扰,因此在传感器的布局上需要多花心思,安装位置也要尽可能地避免红外信号的碰撞。
用于测距的传感器
机器人光知道哪个方向有障碍物并不够,还必须知道障碍物距离自己具体有多远,才好判断下一步的行动。这时我们就需要测距传感器。
测距传感器大多为非接触式的,目前在个人机器人制作领域用得比较多的是红外和超声波测距传感器两种。
提到红外测距传感器, 就不能不提夏普的GP2D12红外测距传感器。GP2D12几乎可以说是机器人爱好者的必备传感器,在我们平时常看到的一些个人机器人作品中,绝大多数都可以看到它的身影。
这种传感器的优点是体积小,测量准确,电源电压与输出信号都较常规,一般单片机系统都可直接使用,缺点是成本较高,购买途径较少。
超声波测距传感器也是一种很常见的测距传感器,依靠超声波的发射与反射接收中的时间差来判断距离,这和动物界的蝙蝠是一样的,算是仿生学的一项应用。
超声波测距传感器规格很多,测试距离也从远到近都有,价格相差也较大,一般机器人爱好者使用的是测量范围在几厘米到几米的。
超声波测距的优点在于测量范围较大且不使用光学信号,所以被测物体的颜色对于测量结果没有影响,但其成本较高。由于它依靠声速测距,所以对于一些影响声速的因素较敏感,比如温度、风速等,而且最大允许角度较小。
用于亮度判断的传感器。
很多朋友制作的机器人都需要判断环境光的亮度,这时就需要亮度传感器。最常用的便是光敏电阻。光敏电阻是一种随着照射在上面的可见光强度变化而阻值发生相应变化的电阻,可以根据其阻值的变化判断出光强。
光敏电阻的使用也非常简单,只要将它当作普通电阻接入电路,根据电流变化便可得出电阻值的变化,进而判断出光强的变化。对于机器人制作,光敏电阻是一种成本低廉、可靠性好、测量准确的元件。
用于测量速度的传感器
机器人自身的行走速度对于判断机器人运动状态和机器人所在位置非常重要,这里我们主要讨论一下对机器人小车运动速度的测量。
车型机器人依靠电机驱动轮子来运动,因此测量机器人小车的速度可以归结为测量驱动电机的转速。那么怎么测量电机的转速呢?测量电机转速有很多种方法,比较适合个人机器人爱好者的是采用光电编码器。光电编码器也有很多种,在个人机器人上比较常见的有两种,一种为反射式,一种为透射式。
反射式的基本结构是在电机的旋转轴上加一个圆形的黑白相间码盘,很多都是粘在轮子上的,离码盘很近的地方固定一个红外发射/接收一体模块,利用黑白色对红外线的吸收率不同来进行判断。红外线照射到黑色部分时,大部分被吸收,而无反射信号;红外线照射到白色部分时,大部分红外线被反射回来,而产生强烈的反射信号。当码盘随电机旋转时,红外接收端的输出信号便是一个由旋转速度决定频率的方波,进而我们便可知道此时电机的旋转速度。
透射式检测原理与反射式相似。唯一的不同是它没有图9中黑白相间的码盘,而是在光栅圆盘上开了一圈小孔,红外线或可见光的发射端与检测端分别位于光栅圆盘的两侧,同样利用光栅圆盘旋转后产生的脉冲信号来检测电机的旋转速度。
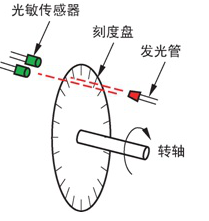
从本质上来说,两种传感器都属于光电传感器,这类传感器价格便宜、结构可靠、检测结果准确,不过对于安装位置要求较高。
检测电机转速,除了光电传感器之外,还有一些利用磁效应原理的传感器,汽车上经常使用这种传感器。
-
传感器
+关注
关注
2561文章
52359浏览量
762635 -
工业机器人
+关注
关注
91文章
3438浏览量
93666
原文标题:【Robot 学院】一文读懂传感器在工业机器人中的应用
文章出处:【微信号:robotn,微信公众号:产业大视野】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
爱普生XV7001BB角速度传感器在工业机器人领域的应用

探讨 GaN FET 在人形机器人中的应用优势
伺服电动缸在人形机器人中的应用
位移传感器在机器人中的角色
变速齿轮在机器人中的使用
霍尔元件在扫地机器人中的应用
PID控制在机器人中的应用案例
FUTEK传感器在人形机器人中的应用
触觉传感器的发展,对机器人产业有什么影响?


NLP技术在机器人中的应用
工业机器人中视觉控制器的种类和作用
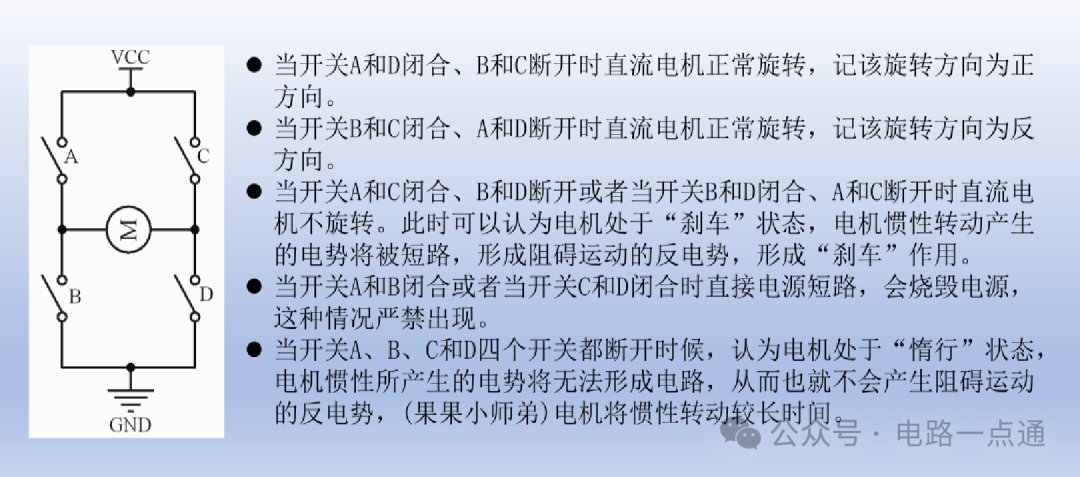
【H桥电机驱动电路原理】-学习笔记
工作原理电路分析这是一个由晶体管构成的H桥电机驱动电路,以下是对其各部分的介绍:核心器件晶体管:电路中使用了PNP型的SS8550(Q5、Q6)和NPN型的SS8050(Q9、Q10、Q13、Q14)。通过不同晶体管的导通与截止组合,实现电机两端电压极性的切换,进而控制电机正反转。比如,当Q5和Q10导通,Q6和Q9截止时,电流从MotorL+流入电机,从M
ATA-2041高压放大器在CFRP板分层缺陷的空耦超声原位测量中的应用
前言空气耦合超声波技术,作为一种高效且无损的检测方法,近年来在工业领域受到了广泛关注。其独特之处在于利用空气作为耦合介质,无需与被测物体直接接触,即可实现高精度的检测与成像。它能够检测在用CFRP板中的缺陷确保其应用安全,但传统的空气耦合超声方法通常依赖于线性缺陷指数在表征小尺寸缺陷方面无效。此外扫描步长完全限制了它们的成像空间分辨率,导致成像空间分辨率与检

TwinCAT3 EtherCAT抓包 | 技术集结
在使用TwinCAT测试EtherCATEOE功能时,我们会发现正常是无法使用Wireshark去进行网络抓包抓取EtherCAT报文的,今天这篇文章就带大家来上手EtherCAT抓包方式。准备环境硬件环境:EtherKit开发板网线一根Type-CUSB线一根软件环境TwinCAT3RT-ThreadstudiowiresharkEtherCATEOE工程

EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用
机器视觉是基于软件与硬件的组合,通过光学装置和非接触式的传感器自动地接受一个真实物体的图像,并利用软件算法处理图像以获得所需信息或用于控制机器人运动的装置。机器视觉可以赋予机器人及自动化设备获取外界信息并认知处理的能力。机器视觉系统内包含光学成像系统,可以作为自动化设备的视觉器官实现信息的输入,并借助视觉控制器代替人脑实现信息的处理与输出。从而实现赋予自动化

新品 | 26+6TOPS强悍算力!飞凌嵌入式FCU3501嵌入式控制单元发布
飞凌嵌入式FCU3501嵌入式控制单元基于瑞芯微RK3588处理器开发设计,4xCortex-A76+4xCortex-A55架构,A76主频高达2.4GHz,A55核主频高达1.8GHz,支持8K编解码,NPU算力6TOPS,支持算力卡拓展,可以插装Hailo-8 26TOPS M.2算力卡。
接口核心板必选 | 视美泰AIoT-3568SC 、 AIoT-3576SC:小身材大能量,轻松应对多场景设备扩展需求!
在智能硬件领域,「适配」是绕不开的关键词。无论是小屏设备的”寸土寸金”,还是模具开发的巨额成本,亦或是多产品线兼容的复杂需求,开发者总在寻找一款能「以不变应万变」的核心解决方案。视美泰旗下的AIoT-3568SC与AIoT-3576SC接口核心板系列,可以说是专为高灵活适配场景而生!无需为设备尺寸、模具限制或产品线差异妥协,一块核心板,即可释放无限可能。为什
3核A7+单核M0多核异构,米尔全新低功耗RK3506核心板发布
近日,米尔电子发布MYC-YR3506核心板和开发板,基于国产新一代入门级工业处理器瑞芯微RK3506,这款芯片采用三核Cortex-A7+单核Cortex-M0多核异构设计,不仅拥有丰富的工业接口、低功耗设计,还具备低延时和高实时性的特点。核心板提供RK3506B/RK3506J、商业级/工业级、512MB/256MBLPDDR3L、8GBeMMC/256
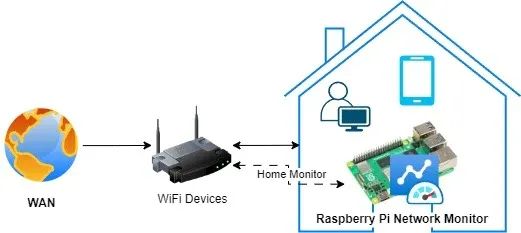
搭建树莓派网络监控系统:顶级工具与技术终极指南!
树莓派网络监控系统是一种经济高效且功能多样的解决方案,可用于监控网络性能、流量及整体运行状况。借助树莓派,我们可以搭建一个网络监控系统,实时洞察网络活动,从而帮助识别问题、优化性能并确保网络安全。安装树莓派网络监控系统有诸多益处。树莓派具备以太网接口,还内置了Wi-Fi功能,拥有足够的计算能力和内存,能够在Linux或Windows系统上运行。因此,那些为L

STM32驱动SD NAND(贴片式SD卡)全测试:GSR手环生物数据存储的擦写寿命与速度实测
在智能皮电手环及数据存储技术不断迭代的当下,主控 MCU STM32H750 与存储 SD NAND MKDV4GIL-AST 的强强联合,正引领行业进入全新发展阶段。二者凭借低功耗、高速读写与卓越稳定性的深度融合,以及高容量低成本的突出优势,成为大规模生产场景下极具竞争力的数据存储解决方案。

芯对话 | CBM16AD125Q这款ADC如何让我的性能翻倍?
综述在当今数字化时代,模数转换器(ADC)作为连接模拟世界与数字系统的关键桥梁,其技术发展对众多行业有着深远影响。从通信领域追求更高的数据传输速率与质量,到医疗影像领域渴望更精准的疾病诊断,再到工业控制领域需要适应复杂恶劣环境的稳定信号处理,ADC的性能提升成为推动这些行业进步的重要因素。行业现状分析在通信行业,5G乃至未来6G的发展,对基站信号处理提出了极
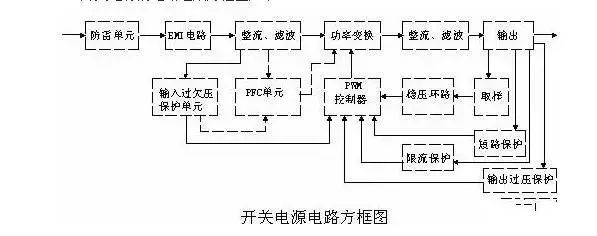
史上最全面解析:开关电源各功能电路
01开关电源的电路组成开关电源的主要电路是由输入电磁干扰滤波器(EMI)、整流滤波电路、功率变换电路、PWM控制器电路、输出整流滤波电路组成。辅助电路有输入过欠压保护电路、输出过欠压保护电路、输出过流保护电路、输出短路保护电路等。开关电源的电路组成方框图如下:02输入电路的原理及常见电路1AC输入整流滤波电路原理①防雷电路:当有雷击,产生高压经电网导入电源时
有几种电平转换电路,适用于不同的场景
一.起因一般在消费电路的元器件之间,不同的器件IO的电压是不同的,常规的有5V,3.3V,1.8V等。当器件的IO电压一样的时候,比如都是5V,都是3.3V,那么其之间可以直接通讯,比如拉中断,I2Cdata/clk脚双方直接通讯等。当器件的IO电压不一样的时候,就需要进行电平转换,不然无法实现高低电平的变化。二.电平转换电路常见的有几种电平转换电路,适用于

瑞萨RA8系列教程 | 基于 RASC 生成 Keil 工程
对于不习惯用 e2 studio 进行开发的同学,可以借助 RASC 生成 Keil 工程,然后在 Keil 环境下愉快的完成开发任务。

共赴之约 | 第二十七届中国北京国际科技产业博览会圆满落幕
作为第二十七届北京科博会的参展方,芯佰微有幸与800余家全球科技同仁共赴「科技引领创享未来」之约!文章来源:北京贸促5月11日下午,第二十七届中国北京国际科技产业博览会圆满落幕。本届北京科博会主题为“科技引领创享未来”,由北京市人民政府主办,北京市贸促会,北京市科委、中关村管委会,北京市经济和信息化局,北京市知识产权局和北辰集团共同承办。5万平方米的展览云集

道生物联与巍泰技术联合发布 RTK 无线定位系统:TurMass™ 技术与厘米级高精度定位的深度融合
道生物联与巍泰技术联合推出全新一代 RTK 无线定位系统——WTS-100(V3.0 RTK)。该系统以巍泰技术自主研发的 RTK(实时动态载波相位差分)高精度定位技术为核心,深度融合道生物联国产新兴窄带高并发 TurMass™ 无线通信技术,为室外大规模定位场景提供厘米级高精度、广覆盖、高并发、低功耗、低成本的一站式解决方案,助力行业智能化升级。





 工商网监
工商网监
评论