 打造视觉导向的机器人和无人机全可编程soc
打造视觉导向的机器人和无人机全可编程soc
嵌入式视觉可划分为两个高级类别;感知环境和采取行动。视觉导向的机器人和无人机属于后面的采取行动类。
在民用领域,目前无人机是商业、医疗、农业、广播和执法应用中最热门的话题之一。对许多这样的应用,无人机可提供显著的优势。在广播和执法领域,无人机能够以低得多的成本提供之前需要直升机才能提供的能力。无人机还能执行预订服务,例如,即将推出的 Amazon Prime (亚马逊贵宾会员) 交货服务,或者如乌干达偏远地区的医疗产品交货服务。在农业应用中,无人机能使用高光谱成像来判断作物的健康状况。而这些应用, 只不过是目前已经在使用或正在考虑使用无人机技术的广泛应用的冰山一角。
农业无人机应用示例
§ 嵌入式视觉应用趋势
这些应用,综合起来体现着我们在嵌入式视觉总体环境中观察到的嵌入式视觉当前四大普遍趋势中的三大趋势:
1. 边缘 (edge)端通过机器学习获得的智能化– 智能化嵌入在无人机本身内部,需要从它的摄像头提取信息并根据该信息采取行动,达成自己的目标。
2. 开放式高级语言和框架– 在无人机中实现智能化需要高级框架和语言。这些中最常用的是开源多平台框架,比如嵌入式环境里的 OpenCV、OpenVX, 以及在机器学习环境里的 Tensor Flow 和 Caffe。
3. 多层次的安全性– 用于确保无人机不仅能够运行,且不能影响安全性和信息获取。这种方法要求在器件、系统和网络层面实现多层次的安全性。
第四个趋势是嵌入式视觉的普及化。虽然视觉导向的机器人和无人机还不像我们的手机一样普及——我们常在旅行中用手机来翻译标牌等用途,随着新用例被发掘出来,使用视觉导向的机器人和无人机的应用正处于快速发展中。
在架构层面无人机拥有一些关键的子系统,包括实时精准的马达控制系统、提供与无人机双向通信的软件无线电和精确的嵌入式视觉系统。视觉导向的机器人和无人机主要针对大部分电池供电的应用,因此设计高能效解决方案的能力极为重要。
高精度嵌入式视觉系统提供高帧率,其处理图像和根据图像采取行动的能力要远超过人眼。对许多应用来说,需要使用多个摄像头来形成立体多视觉,以完整掌握无人机周边环境。这也称为传感器融合。虽然许多应用使用多摄像头方法来观察环境,部分应用还会把设计用于观测电磁场频谱不同组成部分的摄像头结合起来使用,例如在超光谱或红外应用中的情况。在使用多个相同类型传感器的时候这一般称为同构,在使用不同传感器技术的时候称为异构。
在算法层面,这种高精度嵌入式视觉系统运行的算法有同步定位与地图构建(SLAM)和稠密光流(Dense Optical Flow),可以为平台提供增强型感知和避障系统。这些算法同时还与更传统的模式和对象识别算法互相结合。
稠密光流设计
视觉导向的机器人和无人机因此不仅需要强大的处理能力,还需要有能力进行功耗优化,提供面向未来且具有可扩展性的解决方案。
All Programmable ( 全可编程) Zynq SoC可针对您面临的问题提供独特的解决方案。Zynq提供的高性能逻辑与双核ARM A9处理器集成可打造出紧密集成的异构处理单元。该异构处理单元能够在处理器内或可编程逻辑内实现高效率的功能细分。
使用基于ARM的处理系统,可以在边缘开展极为复杂的实时视觉分析。在与可编程逻辑架构结合后,它提供实时检测对象然后使用处理器系统分类对象的能力。分类完成后,视觉导向机器人系统或无人机就能针对检测出的对象类采取适当的行动。
为在边缘实现实时视觉分析,我们运用了机器学习提供的智能化技术。要执行这些算法,我们首先需要模型并提供大型培训数据集,使模型能够进行分析。在极高性能工作站上进行培训,得到的分类器被用于实现方案中。开展这类机器学习有多种不同的方法可供选择,例如,卷积神经网络、深度神经网络或递归神经网络。
当我们在边缘实现这些模型时,我们不需要与培训相同水平的性能。可以使用整数或浮点数学,两者都能方便地实现在All Programmable SoC中。
§全可编程SoC 面向嵌入式视觉的独特优势
SoC内的可编程逻辑架构本身具有可重编程性,这意味着该器件能支持任意连接。同时处理系统内的多路复用IO(MIO)提供通过多种常用协议(从 SPI、I2C 和串行到千兆以太网、CAN 和 USB)连接的能力,拥有极为灵活的从该设备输入/输出数据的方式。
Zynq同时接口和处理多个摄像头输入的实例
对使用的图像传感器来说,可编程逻辑架构还能够支持最适合于目前应用的特定传感器。与限制传感器接口和图像处理流水线的一些标准解决方案不同,这种高度的灵活性能够打造出面向未来的设计方案。目前它可以先实例化一个接口,然后随着新标准的出现,重新编程已经部署的系统以支持新标准。可编程逻辑的灵活性还体现在能从一个标准转换到另一个标准。
在同构和异构传感器融合方面,这个最大的 SoC 产品系列提供充足的可编程逻辑架构,能实现20个以上的视觉通道并让每一个通道并行运行。因为这些通道实现在可编程逻辑架构内,设计工程人员不受定义的图像处理路径制约,相反他们有能力为目前的应用实现所需的特定图像处理流水线。
就生成图像处理流水线而言,和普通的想法不同的是我们不必使用 HDL 重新生成一切。在标准 Vivado IP 库内提供了一些图像处理内核,使用 AXI Streaming 接口就能够连接。使用 AXI Streaming 接口便于把灵活、可扩展的图像处理流水线创建成标准接口,用在所有的 IP 模块上。这种标准化能缩短初始开发时间,便于随着产品规划图的延伸更容易地升级和复用。
当然许多图像处理算法相当复杂,需要先在 OpenCV 或 MATLAB 等应用中建模。OpenCV 能与 Vivado 高层次综合视频库结合,即 OpenCV 库的可综合版本,极为简便地为我们的流水线实现图像处理算法。随后这些算法能拉回到 Vivado 内的图像处理流水线中,缩短开发和验证时间。
另外,还可以实现基于 MathWorks MATLAB 流程的模型设计流程。它能够先在模型层面定义整个图像处理流水线,然后在定义底层的代码。不过大多数现代应用都必须考虑安全性,以防范对系统、系统数据的无授权改动或访问,或是防范恶意黑客攻击。开发安全设计必须从系统层面自上而下考虑。不过使用 All Programmable SoC 能提供一系列器件级和系统级安全功能,让实现工作变得简便易行。Zynq SoC 能够对导向与配置流程进行加密和认证。也可使用 Trust Zone 技术创建正交环境,限制软件借助管理程序访问底层硬件。同时,内置的 XADC 能用于监测器件电压和温度以及外部参数,提供防篡改方法。还有一些功能能实现在设计中,进一步增强安全性。
全可编程 SoC 能实现多个并行图像处理流水线以及同构/异构传感器融合,然后实时执行视觉分析和决策,而且提供对电池供电系统非常关键的极高效的单位功耗性能。借助内在的灵活性,All Programmable SoC 能提供真正的差异化因素,值得在设计中考虑使用,尤其是在需要考虑单位功耗像素数量的时候。
§单芯片全可编程SoC 实现的智能系统
随着视觉导向机器人和无人机应用的快速发展,视觉导向的机器人和无人机本身也正在飞速发展。要开发出拥有理想单位功耗性能的高精度视觉系统,最好是使用全可编程SoC。全可编程 SoC 能实现大量并行处理链,在边缘完成传感器融合和实时分析,同时提供高能效、高灵活度和高安全性的系统。赛灵思全可编程 SoC可以在单个器件中实现处理系统与可编程逻辑的强大组合,支持硬件加速计算。
在这些应用中通常实现的算法有多种,最常见的三种是:
● 环视系统– 这些系统用于生成车辆周边环境的三维可视化,实现对环境的进一步了解。典型的环视系统使用球面摄像头。环视往往用于需要同步定位与地图构建(SLAM)和光流的应用中。
●全景摄像头– 这些摄像头为周边环境提供360度视野,用于监控应用和车辆可视化。
●异构传感器融合– 融合来自电磁频谱不同组成部分的图像,例如红外成像,以增强低光/夜视性能。
实现这些算法会带来几个必须解决的共同挑战,例如:透镜校正、消除透镜失真、视角转换、使用并行表面进行视频纹理填充。
结合电磁频谱中可视部分和红外部分的传感器融合实例
另一个是如何呈现最终图像。这就带来了多通道处理和多通道同步的难题,但这是保证所有摄像头都显示相同帧所需要的。当然多通道处理和同步问题并不只局限于视觉导向的的机器人和无人机应用,这是许多嵌入式视觉应用的通病。视觉导向的机器人和无人机也是检测和分类对象,实现自动和半自动操作所需要的。
§全可编程 SoC 提供的 IP
在工程项目中实现这些复杂的图像处理算法堪称一项壮举。它需要具有专家级技能水平的工程师正确地在 SoC 内实现算法。这些工程师能够针对目标架构开发和优化特定问题。取得这样的技能需要企业聘用一个长期工程师或分包工程师。除了需要取得专家级技能,由于需要全新开发这些功能,还会延长产品上市时间。
使用专业提供商开发的 IP,无需寻找专家级工程师,同时还能够缩短开发时间,从而加速产品上市进程。它还能够让开发企业集中精力实现产品增值,确保嵌入式视觉产品在市场上占据有力地位。
使用现有的、基于成熟技术的 IP 模块还降低了项目的总体风险。在项目上使用商用 IP 核,还能与辅助合同一起提供,让内核能无缝集成到您的应用中。有数个 IP 模块作为 Vivado Design Suite 标配提供,其它用于嵌入式解决方案的高级商用 IP 由多家第三方供应商提供。
其中一个这样的图像处理库组合就是 Xylon 在他们的 LogicBRICKS IP 库中提供的。该库专门为在 Vivado Design Suite 中使用进行了优化。一旦这些 IP 模块运用到 Vivado 设计中,它们就能够根据应用的要求加以定制。在 logicBRICKS IP 库内有数个对开发视觉导向的的机器人和无人机应用有重要意义的 IP 模块。
在嵌入式视觉应用中往往使用基于梯度方向直方图(HOG)分类器来检测和跟踪对象。HOG分类器使用属于机器学习一部分的支持向量机(SVM)。在 logicBRICK 库内有一个以 LogiHOG 形式提供的 HOG 分类器,能够检测多达四个不同的 SVM 分类器,从而并行检测多个对象。这些 SVM 经训练和更新后能适应天气和灯光等多种不同条件。
工作中的 LogiHOG 分类器
LogicBRICKS 库中有多种其他常用的 IP 核,可用于简化开发工作。另外还有几种图像信号处理流水线可供设计人员实现在自己的设计中。这些图像处理内核提供完整解决方案,支持创建高达 4K2K P60 的流水线。这些流水线在 SoC 内与摄像头界面接口,因此能够支持多种不同的摄像头技术。
开发流程遵循传统 SoC 开发,根据运行要求配置 SoC。LogicBRICKS 库中的 IP 核随后插入到可编程逻辑架构中,以构成具备所需功能的图像处理流水线。然后用运行在 ARM A9 内核上的应用软件提供的 API 调用按要求实时地精调算法。
许多应用使用的是高动态范围摄像头。动态范围代表的是传感器捕获拥有宽范照度强度的图像的能力,一般使用 dB 或比率来表达。这意味着同一幅图像中可以同时有高照度区域和黑暗区域。通过增强图像的照度和图像局部区域的亮度,logiHDR 内核提供与这些摄像头接口并从图像中提取最大细节的能力。
§借助 SDSoC 开发工具推动加速系统设计
在使用免费或商用 IP 实现大部分图像处理流水线后,要让应用功能完整,还有需要实现的其余功能。使用 SoC 就能在处理器中或是在可编程逻辑中完成这一步。使用 SDSoC 开发工具,我们能无缝地在这两者间移植功能,加快首先用高级语言开发的应用的设计速度。
要发挥 SDSoC 的功能,我们可以使用 IP 核定义一个包含底层图像处理流水线的新平台。SDSoC 随后就能够使用可用的逻辑和互联资源加速设计。在 SDSoC 内有多个库可供设计人员开发能在可编程逻辑内加速的应用。具体到图像处理,主要有两个支持 HLS 的库:
●HLS_video– 该库提供嵌入式视觉功能和数据结构。这些元素可综合在一起。
●HLS_OpenCV– 该库提供预先编译的 OpenCV 功能,以及与 IP 模块接口所需的专门支持功能。该库目的是供测试台使用,因此不可综合。
许多算法将使用 OpenCV 等开源图像处理框架开发。因此,在使用 SDSoC 开发以加速为目的的系统时,设计人员希望使用熟悉的框架。这就是 HLS_OpenCV 库配合 SDSoC 开发工具发挥作用的地方。它提供与加速功能接口所需的功能。
OpenCV 组元中最基本的是 cv::mat 类,用于定义以 X 轴和 Y 轴表示的图像大小以及像素信息。例如每个像素内的位数、有符号还是无符号、多少个通道构成一个像素。这个类是我们使用 OpenCV 时如何存储和操作图像的基础。
在 HLS 库中有一个类似的结构,即 hls::mat。鉴于 HLS 流是创建图像处理流水线的标准接口,该库还提供一些让我们能把 hls::mat 类转化为 HLS 流或把 HLS 流转化为 hls::mat 类的功能。cv::mat 类和 hls::mat 类之间的主要区别在于 hls::mat 类被定义为适用可编程逻辑架构的像素流,这与属于内存映射的 cv::mat 类不同。流实现和内存映射实现之间的这种差别意味着我们使用 hls::mat 类时不必随即访问像素。
这样就能够使用处理器内的双 ARM A9 内核完成应用的初步开发,确保算法的功能。在需要该功能时,可编程逻辑中的算法就能被加速。设计人员可使用追踪和 AXI 性能监测等 SDSoC 功能优化加速性能。
视觉导向的的机器人和无人机技术在开发嵌入式视觉算法的过程中面临一系列的难题,但这些算法可帮助视觉导向的的机器人和无人机了解所处环境并根据得到的信息做出决策。为协助这些图像处理系统的开发工作,设计人员可使用 IP 核提供的功能,并运用 SDSoC 等系统级开发工具,生成所需的最终硬件加速功能。
-
无人机
+关注
关注
230文章
10662浏览量
184981 -
智能系统
+关注
关注
2文章
403浏览量
73044 -
嵌入式视觉
+关注
关注
8文章
118浏览量
59433
发布评论请先 登录
海思方案提供商,4K运动相机,无人机,机器人,图传
海思方案提供商 4K运动相机,无人机,机器人,图传
【LattePanda试用申请】基于LabVIEW的无人机视觉系统
新一代磁性位置传感器助力无人机、轻工业、医疗以及太空机器人应用有哪些?
【疯壳·无人机教程2】开源编队无人机-硬件资源简介
搭载KaihongOS的工业平板、机器人、无人机等产品通过3.2版本兼容性测评,持续繁荣OpenHarmony生态
可编程SoC(SoPC),什么是可编程SoC(SoPC)
视觉导向的机器人和无人机可编程SoC设计
IDC最新预测:全球半年度机器人和无人机支出指南
2019年中国将成全球机器人和无人机最大市场
IDC:今年机器人和无人机支出达到1287亿美元


飞凌嵌入式携手中移物联,谱写全国产化方案新生态
4月22日,飞凌嵌入式“2025嵌入式及边缘AI技术论坛”在深圳成功举办。中移物联网有限公司(以下简称“中移物联”)携OneOS操作系统与飞凌嵌入式共同推出的工业级核心板亮相会议展区,操作系统产品部高级专家严镭受邀作《OneOS工业操作系统——助力国产化智能制造》主题演讲。
ATA-2022B高压放大器在螺栓松动检测中的应用
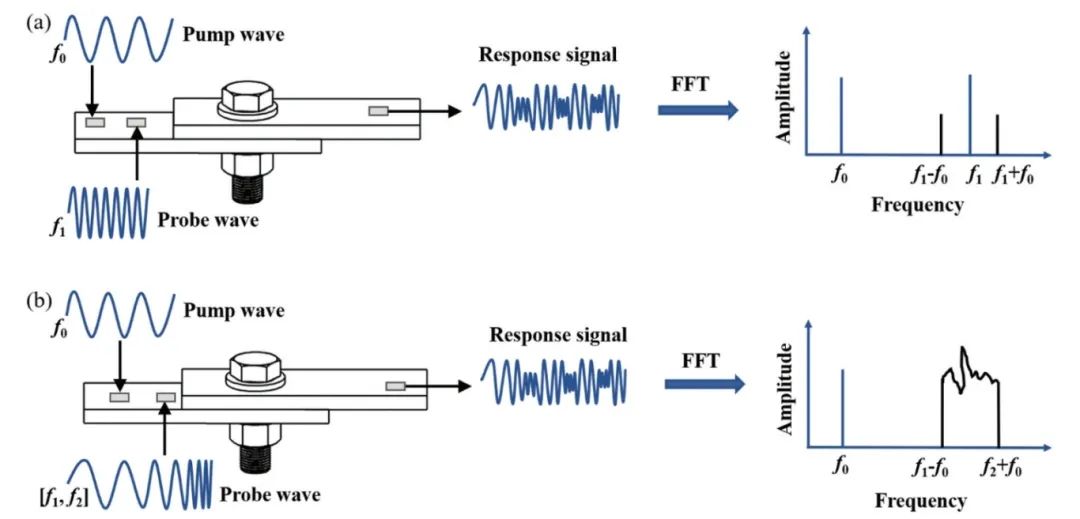
实验名称:ATA-2022B高压放大器在螺栓松动检测中的应用实验方向:超声检测实验设备:ATA-2022B高压放大器、函数信号发生器,压电陶瓷片,数据采集卡,示波器,PC等实验内容:本研究基于振动声调制的螺栓松动检测方法,其中低频泵浦波采用单频信号,而高频探测波采用扫频信号,利用泵浦波和探测波在接触面的振动声调制响应对螺栓的松动程度进行检测。通过螺栓松动检测
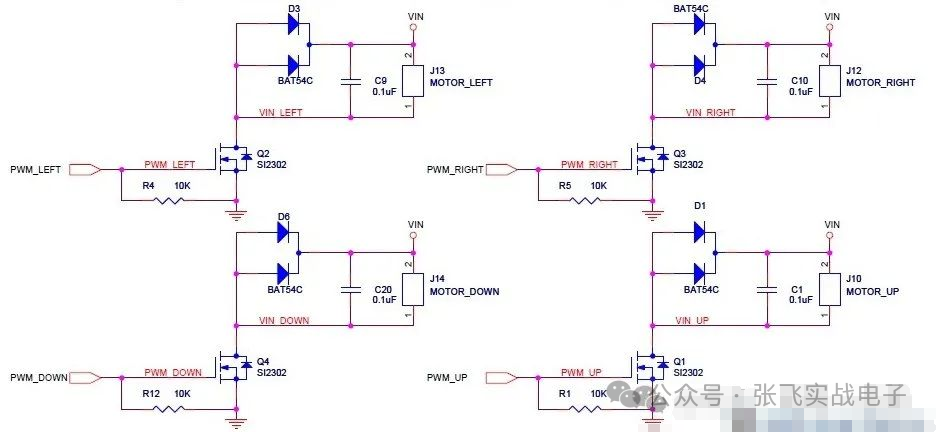
MOS管驱动电路——电机干扰与防护处理
此电路分主电路(完成功能)和保护功能电路。MOS管驱动相关知识:1、跟双极性晶体管相比,一般认为使MOS管导通不需要电流,只要GS电压(Vbe类似)高于一定的值,就可以了。MOS管和晶体管向比较c,b,e—–>d(漏),g(栅),s(源)。2、NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V或10V就可以

压敏(MOV)在电机上的应用剖析
一前言有刷直流电机是一种较为常见的直流电机。它的主要特点包括:1.结构相对简单,由定子、转子、电刷和换向器等组成;2.通过电刷与换向器的接触来实现电流的换向,从而使电枢绕组中的电流方向周期性改变,保证电机持续运转;3.具有调速性能较好等优点,可以通过改变电压等方式较为方便地调节转速。有刷直流电机在许多领域都有应用,比如一些电动工具、玩具、小型机械等。但它也存
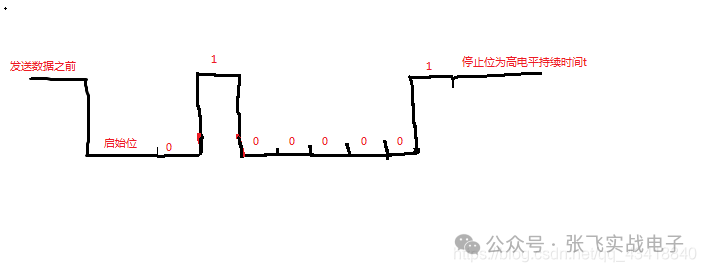
硬件原理图学习笔记
这一个星期认真学习了硬件原理图的知识,做了一些笔记,方便以后查找。硬件原理图分为三类1.管脚类(gpio)和门电路类输入输出引脚,上拉电阻,三极管与门,或门,非门上拉电阻:正向标志作用,给悬空的引脚一个确定的状态三极管:反向三极管(gpio输出高电平,NP两端导通,被控制端导通,电压为0)->NPN正向三极管(gpio输出低电平,PN两端导通,被控制端导通,

TurMass™ vs LoRa:无线通讯模块的革命性突破
TurMass™凭借其高传输速率、强大并发能力、双向传输、超强抗干扰能力、超远传输距离、全国产技术、灵活组网方案以及便捷开发等八大优势,在无线通讯领域展现出强大的竞争力。

RZT2H CR52双核BOOT流程和例程代码分析
RZT2H是多核处理器,启动时,需要一个“主核”先启动,然后主核根据规则,加载和启动其他内核。本文以T2H内部的CR52双核为例,说明T2H多核启动流程。

干簧继电器在RF信号衰减中的应用与优势
在电子测试领域,RF(射频)评估是不可或缺的一部分。无论是研发阶段的性能测试,还是生产环节的质量检测,RF测试设备都扮演着关键角色。然而,要实现精准的RF评估,测试设备需要一种特殊的电路——衰减电路。这些电路的作用是调整RF信号的强度,以便测试设备能够准确地评估RF组件和RF电路的各个方面。衰减器的挑战衰减器的核心功能是校准RF信号的强度。为了实现这一点,衰

ElfBoard嵌入式教育科普|ADC接口全面解析
当代信息技术体系中,嵌入式系统接口作为数据交互的核心基础设施,构成了设备互联的神经中枢。基于标准化通信协议与接口规范的技术架构,实现了异构设备间的高效数据交换与智能化协同作业。本文选取模数转换接口ADC作为技术解析切入点,通过系统阐释其工作机理、性能特征及重要参数,为嵌入式学习者爱好者构建全维度接口技术认知框架。
深入理解C语言:C语言循环控制
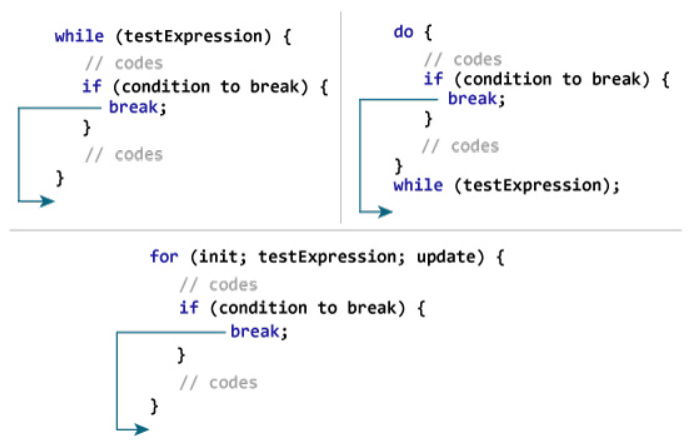
在C语言编程中,循环结构是至关重要的,它可以让程序重复执行特定的代码块,从而提高编程效率。然而,为了避免程序进入无限循环,C语言提供了多种循环控制语句,如break、continue和goto,用于改变程序的执行流程,使代码更加灵活和可控。本文将详细介绍这些语句的作用及其应用场景,并通过示例代码进行说明。Part.1break语句C语言中break语句有两种

第 21 届(顺德)家电电源与智能控制技术研讨会圆满落幕--其利天下斩获颇丰
2025年4月25日,其利天下应大比特之邀出席第21届(顺德)家电电源与智能控制技术研讨会,已圆满落幕。一、演讲回顾我司研发总监冯建武先生在研讨会上发表了主题为《重新定义风扇驱动:一套算法兼容百种电机的有效磁链观测器方案》的演讲,介绍了我司研发自适应技术算法(简称),该方案搭载有效磁链观测器,适配百种电机类型,结合FOC算法可实现免调参稳定启动、低速静音控制

来自资深工程师对ELF 2开发板的产品测评
来自资深工程师对ELF 2开发板的使用测评

飞凌嵌入式2025嵌入式及边缘AI技术论坛圆满结束
飞凌嵌入式「2025嵌入式及边缘AI技术论坛」在深圳深铁皇冠假日酒店盛大举行,此次活动邀请到了200余位嵌入式技术领域的技术专家、企业代表和工程师用户,共享嵌入式及边缘AI技术的盛宴!
常用运放电路总结记录
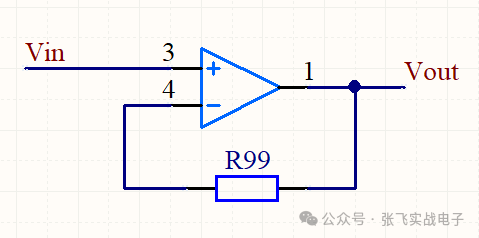
一、电压跟随器电压跟随器,电路图如下:电路分析:(本文所有的运放电路分析,V+表示运放同向输入端的电压,V-表示反向输入端的电压。)1.1电压跟随器反馈电阻需不需要?在上面的电压跟随器示例中,我画上了一个反馈电阻R99,大家在学习的运放的时候,可能很多地方也会提一下这个反馈电阻,很多地方会说可加可不加,效果一样。电阻需不需要加:但是本文这里个人建议使用电压跟
运放-运算放大器经典应用电路大全-应用电路大全-20种经典电路
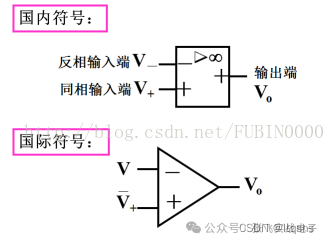
20种运放典型电路总结,电路图+公式1、运放的符号表示2、集成运算放大器的技术指标(1)开环差模电压放大倍数(开环增益)大Ao(Ad)=Vo/(V±V-)=107-1012倍;(2)共模抑制比高KCMRR=100db以上;(3)输入电阻大ri>1MW,有的可达100MW以上;(4)输出电阻小ro=几W-几十W3、集成运放分析方法(V+=V-虚短,ib-=ib





 工商网监
工商网监
评论