 电子发烧友App
电子发烧友App


记录空气中的 GPS 讯号
建立 GPS 波形时,其独特又日趋普遍的方式,即是直接从空气中撷取之。在此测试中,我们使用向量讯号分析器 (如 NI PXI 5661) 记录讯号,再透过向量讯号产生器 (如 NI PXIe-5672) 产生已记录的讯号。由于在记录 GPS 讯号时,亦可撷取实际的讯号减损 (Impairments),因此在播放讯号时,可进一步了解接收器于布署环境中的作业情形。
只要透过极为直接的方式,即可撷取空气中的 GPS 讯号。在 RF 记录系统中,我们将适合的天线与放大器,搭配使用 PXI 向量讯号分析器与硬盘,以撷取最多可达数个小时的连续数据。举例来说,1 组 2 TB 的 RAID 磁盘阵列,即可记录最多 25 个小时的 GPS 波形。由于此篇技术文件将不会讨论串流的特殊技术,因此若需要相关范例程序代码,请至:ni.com/streaming/rf. 透过下列段落,即可了解应如何针对 RF 记录与播放系统,设定合适的 RF 前端。
不同类型的无线通信讯号,均需要不同的带宽、中央频率,与增益。以 GPS 讯号来说,基本系统需求是以 1.57542 GHz 的中央频率,记录 2.046 MHz 的 RF 带宽。依此带宽需求,至少必须达到 2.5 MS/s (1.25 x 2 MHz) 取样率。注意:此处的 1.25 乘数,是根据 PXI-5661 数字降转换器 (DDC) 于降频 (Decimation) 阶段的下降 (Roll-off) 滤波器所得出。
在下方说明的测试作业中,我们使用 5 MS/s (20 MB/s) 取样率以撷取完整的带宽。由于标准 PXI 控制器硬盘即可达到 20 MB/s 或更高的数据流量,因此不需使用外接的 RAID亦可将 GPS 讯号串流至磁盘。然而,基于 2 个理由,我们仍建议使用外接硬盘。首先,外接硬盘可提升整体的数据储存量,并记录多组波形。其次,外接硬盘不会对 PXI 控制器的硬盘造成额外负担。在下方说明的测试作业中,我们采用 1 组 USB 2.0 的外接硬盘。此硬盘为 320 GB 的 Western Digital Passport,具有 5400 RPM 的硬盘转速。在我们的测试作业中,一般读取速度约落在 25 ~ 28 MB/s。因此该款硬盘可同时用于 GPS 波形数据串流的仿真 (6 MB/s) 与记录 (20 MB/s) 作业。
GPS 讯号记录作业最为特殊之处,即是选择并设定合适的天线与低噪声放大器 (LNA)。透过一般被动式平面天线 (Passive patch antenna),即可于 L1 GPS 频带中发现介于-120 ~ -110 dBm 的常见峰值功率 (此处为 -116 dBm)。由于 GPS 讯号的功率强度极小,因此必须进行放大作业,以使向量讯号分析器可撷取卫星讯号的完整动态范围。虽然有多个方法可将合适的增益强度套用至讯号,不过我们发现:若使用主动式 GPS 天线搭配 NI PXI-5690 前置放大器 (Pre-amplifier) 时,即可达到最佳效果。若串联 2 组各可达 30 dB 增益的 LNA,则总增益则可达到 60 dB (30 + 30)。因此,向量讯号分析器可测得的峰值功率,将从 -116 dBm 提升至 -56 dBm。下图即为该项设定的范例系统:

图 4. GPS 接收器与串联的 LNA。
请注意,记录操作系统的必备组件之一,即为主动式 GPS 天线。主动式 (Active) GPS 天线,包含 1 组平面天线与 1 组 LNA。此款天线一般均需要 2.5V ~ 5V 的 DC 偏压电压,并仅需约 $20 美金即可购买现成产品。为了简单起见,我们使用 1 组天线搭配 1 组 SMA 接头。我们将于下列段落中看到,在 RF 前端的第一组 LNA 噪声图形极为重要;该图形将可确认进行记录作业的仪控,是否对无线讯号构成最低噪声。亦请注意,图 4 中的向量讯号分析器为简化图标。实际的 PXI-5661 为 3 阶段式超外差 (Super-heterodyne) 向量讯号分析器,较复杂于图中所示。
若将 60 dB 套用至无线讯号中,则可于 L1 中得到约 -60 ~ -50 dBm 的峰值功率。若以扫频 (Swept spectrum) 模式设定 VSA 并分析整体频谱,则亦将发现 L1 频带 (FM 与移动电话)之外的带中功率 (Power in band),其强度将高于 GPS 讯号。然而,带外 (Out-of-band) 讯号的峰值功率一般均不会超过 -20 dBm,且将透过 VSA 的多组带通(Band pass) 滤波器之一进行滤波作业。若要检视记录装置的 RF 前端是否达到应有效率,最简单的方法之一即为开启 RFSA 示范面板的范例程序。透过此程序,即可于 L1 GPS频带中呈现 RF 频谱。图 7 即为常见的频谱。请注意,此频谱截图是透过 GPS 中心频率于室外所得。主动式 GPS 天线与 PXI-5690 前置放大器,可达到 60 dB 的总增益。
中心频率:1.57542 GHz
展频 (Span):4 MHz
RBW:10 Hz
平均:RMS、20 Averages

图 5. 仅透过极小的分辨率带宽 (RBW),才可于频谱中呈现 GPS
此处使用前面所提到的 RF 记录与播放 LabVIEW 范例程序;设定 -50 dBm 的参考准位、1.57542 GHz 中央频率,与 5 MS/s 的 IQ 取样率。下图即显示设置范例的人机接口:

图 6. RF 记录与播放范例的人机接口。
GPS 讯号的最长记录时间,将根据取样率与最大储存容量而定。若使用 2 TB 容量的 Raid 磁盘阵列 (Windows XP 所支持的最大磁盘),将可透过 5 MS/s 取样率记录最多 25个小时的讯号。
设定 RF 前端
由于串联的 LNA 可提供 60 dB 的增益,因此使用者可大幅提升向量讯号分析器前端的功率。在我们的量测作业中,60 dB 的增益即足以将峰值功率从 -116 dBm 提升至 -56 dBm。而透过 60 dB 的增益 (与 1.5 dB 的噪声系数),讯号的噪声功率将为 –112 dBm/Hz (-174 + 增益 + F)。因此,所能撷取到的讯噪比 (SNR) 最高可达 56.5 dB (-56 dBm +112.5 dBm),亦低于实际的仪器动态范围。由此可知,若有 80 dB 的动态范围,则 VSA 将可记录最大的 SNR,且不会有无线讯号的噪声影响。
当要记录任何无线讯号时,可将参考准位设定高出一般峰值功率至少 5 dB,以因应任何讯号强度的异常现象。在某些情况下,虽然上述此步骤将降低 VSA 的有效动态范围,但GPS 讯号却不会受到影响。由于 GPS 讯号于天线输入的最大理想 SNR 即为 58 dB (-116 + 174),因此若于 VSA 记录超过 58 dB 的动态范围将无任何意义。因此,我们甚至可以「抛弃」仪器的动态范围达 10 dB 以上,亦不会影响记录讯号的质量 (在此带宽中,PXI-5661 将提供优于 75 dB 的动态范围)。
由于必须设定合适的参考准位,适当设定记录装置的 RF 前端亦显得同样重要。如先前所提,若要获得最佳的 RF 记录数据,则建议使用主动式 GPS 天线。由于主动式天线内建LNA,以低噪声系数提供最高 30 dB 的增益,因此亦可供应 DC 偏压。下方将接着说明多种偏压方式。
方法1: 以 GPS 接收器进行供电的主动式天线
第一个方法,是以 DC 偏压「T」供电至主动式天线。在此范例中,我们将 DC 讯号 (此为 3.3 V) 套用至偏压「T」的DC 埠,且「T」又将合适的 DC 偏移套用至主动式天线。请注意,此处将根据主动式天线的 DC 功率需求,进而决定是否套用精确的 DC 电压。下图即说明相关连结情形。

图 7. 使用 DC 偏压「T」供电至主动式 GPS 天线
在图7 中可发现,PXI-4110 可程序化 DC 电源供应器,即可供应 DC 偏压讯号。虽然多款现成的电源供应器 (其中亦包含价位较低的电源供应器) 均可用于此应用中,我们还是使用 PXI-4110 以简化作业。同样的,现有常见的偏压器 (Bias tee) 可进行最高 1.58 GHz 的作业,而此处所使用的偏压器购自于 www.minicircuits.com.
方法 2:以接收器供电至主动式天线
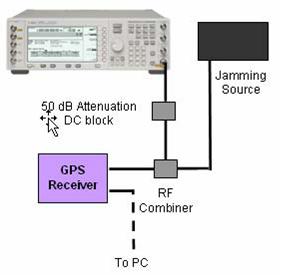
供电至主动式 GPS 天线的第二个方法,即是透过天线本身的接收器。大多数的现成 GPS 接收器,均使用单一端口供电至主动式 GPS 天线,且此端口亦透过合适的 DC 讯号达到偏压。若将主动式 GPS 接收器整合分裂器 (Splitter) 与 DC 阻绝器 (Blocker),即可供电至主动式 LNA,并仅记录 GPS 接收器所获得的讯号。下图即为正确的连结方式:
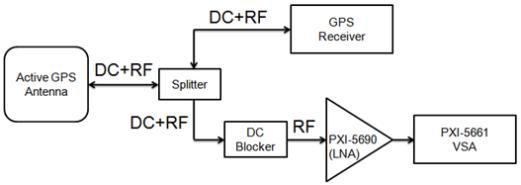
图 8. 透过 DC 阻绝器 (Blocker),将可记录并分析 GPS 讯号
如图 8 所示,GPS 接收器的 DC 偏压即用以供电至 LNA。请注意,由于当进行记录时,即可观察接收器的相关特性,如速度与精确度衰减 (Dilution) 情形,因此方法 2 特别适用于驱动程序测试。
串联式 (Noise figure) 噪声系数计算
若要计算已记录 GPS 讯号的总噪声量,只要找出整体 RF 前端的噪声系数即可。就一般情况来说,整组系统的噪声系数,往往受到系统的第一组放大器所影响。在所有 RF 组件或系统中,噪声系数均可视为 SNRin 与 SNRout (参阅:量测技术的噪声系数) 的比例。当记录 GPS 讯号时,必须先找出整体 RF 前端的噪声系数。
当执行串联式噪声系数计算时,必须先行针对每笔噪声系数与增益,将之转换为线性等式;即所谓的「噪声因子 (Noise factor)」。当以串联的 RF 组件计算系统的噪声系数时,即可先找出系统的噪声因子,并接着转换为噪声系数。因此系统的噪声系数必须使用下列等式计算之:

等式 2. 串联式 RF 放大器的噪声系数计算作业 [3]
请注意,由于噪声因子 (nf) 与增益 (g) 属于线性关系而非对数 (Logarithmic) 关系,因此以小写表示之。下列即为增益与噪声系数,从线性转换为对数 (反之亦然) 的等式:




等式 3 到等式 6. 增益与噪声系数的线性/对数转换 [3]
内建低噪声放大器 (LNA) 的主动式 GPS 天线,一般均提供 30 dB 的增益,且其噪声系数约为 1.5 dB。在仪控记录作业的第二阶段,则由 NI PXI-5690 提供 30 dB 的附加增益。由于其噪声系数较高 (5 dB),因此第二组放大器仅将产生极小的噪声至系统中。在教学实作中,可针对记录仪控作业的完整 RF 前端,使用等式 2 计算其噪声因子。增益与噪声系数值即如下图所示:

表3. RF 前端的首 2 组组件噪声系数与因子。
根据上列计算,即可找出接收器的整体噪声因子:

等式 7. RF 记录系统的串联噪声系数
若要将噪声因子转换为噪声系数 (单位为 dB),则可套用等式 3 以获得下列结果:

等式 8. 第一组 LNA 的噪声系数将影响接收器的噪声系数
如等式 8 所示,第一组 LNA (1.5 dB) 的噪声系数,将影响整组量测系统的噪声系数。透过 VSA 的相关设定,可让仪器的噪声水平 (Noise floor) 低于输入激发的噪声水平,因此用户所进行的记录作业,将仅对无线讯号造成 1.507 dB 的噪声。
对 GPS 接收器发出讯号
由于多款接收器可使用合适的软件,让用户呈现如经度与纬度的信息,因此需要更标准化的方式进行自动量测作业。还好,目前有多款接收器均可透过众所周知的 NMEA-183 协议,以设定对 PXI 控制器发出讯号。如此一来,接收器将可透过序列或 USB 连接线,连续传送相关指令。在 NI LabVIEW 中,所有的指令均可转换语法,以回传卫星与定位信息。NMEA-183 协议可支持 6 种基本指令,并各自代表专属的信息。这些指令即如下表所示:

表4. 基本 NMEA-183 指令概述
以实际测试需要而言,GGA、GSA,与 GSV 指令应最为实用。更值得一提的是,GSA 指令的信息可用于了解接收器是否可达到定位作业需要,或可用于首次定位时间 (Time To First Fix,TTFF) 量测。当执行高敏感性的量测时,实际可针对所追踪的卫星,使用 GSV 指令回传 C/N (Carrier-to-noise) 比。
虽然无法于此详细说明 MNEA-183 协议,但可至其他网站寻找所有的指令信息,如:
www.gpsinformation.org/dale/nmea.htm#RMC. 在 LabVIEW 中,这些指令可透过 NI-VISA 驱动程序转换其语法。

图9. 使用 NMEA-183 协议的 LabVIEW 范例
GPS 量测技术
目前有多种量测作业可为 GPS 接收器的效能进行特性描述 (Characterization),其中亦有数种常见量测可套用至所有的 GPS 接收器中。此章节将说明执行量测的理论与实作,如:敏感度、首次定位时间 (TTFF)、定位精确度/可重复性,与定位追踪不定性 (Uncertainty)。应注意的是,还有许多不同的方式可检验定位精确度,并执行接收器追踪功能的测试。虽然接着将说明多种基本方式,但仍无法概括所有。
敏感度 (Sensitivity) 量测作业介绍
敏感度为 GPS 接收器功能的最重要量测作业之一。事实上,对多款已量产的 GPS 接收器来说,仅限为最后生产测试所执行的 RF 量测而已。若深入来说,敏感度量测即为「接收器可追踪并接收上方卫星定位信息的最低卫星功率强度」。一般人均认为,GPS 接收器必须串联多组 LNA 以达极高的增益,才能将讯号放大到合适的功率强度。事实上,虽然LNA 可提升讯号功率,亦可能降低 SNR。因此,当 GPS 讯号的 RF 功率强度降低时,SNR 也将跟着降低,最后让接收器无法追踪卫星。
多款 GPS 接收器可指定 2 组敏感值:撷取敏感度(Acquisition sensitivity) 与讯号追踪敏感度(Signal tracking sensitivity) [9]。如字面上的意思,撷取敏感度为「接收器可进行定位的最低功率强度」。相反而言,讯号追踪敏感度为「接收器可追踪各个卫星的最低功率强度」。
以基本概念而言,我们可将敏感度定义为「无线接收器产生所需最低位错误率 (BER) 的最低功率强度」。由于 BER 与载波噪声 (Carrier-to-noise,C/N) 比息息相关,因此敏感度一般均是透过已知的接收器输入功率强度,得出所需的 C/N 值而定。
请注意,各组卫星的 C/N 值,均可直接透过 GPS 接收器的芯片组而得。目前有多种方式可计算出此项数值,而某几款接收器却是计算发讯日期 (Message date) 而得出约略值。当透过高功率测试激发进行模拟时,新款 GPS 接收器一般均可得到 54 ~ 56 dB-Hz 的 C/N 峰值。由于即便是万里无云的晴空,GPS 接收器亦可能得出 30 ~ 50 dB-Hz 的C/N 值;因此该 C/N 限值尚属于正常范围之内。一般 GPS 接收器均必须达到最小 C/N 比值,才能符合 28 ~ 32 dB-Hz 的定位 (撷取敏感度) 范围。因此,某些特殊接收器的敏感度可定义为「接收器产生最低定位 C/N 比值所需的最低功率强度」。
理论上来说,单一卫星或多组卫星测试激发均可量测敏感度。而实务上来看,由于已可轻松且稳定发出所需的 RF 功率,因此往往是以单一卫星模式进行量测作业。依定义而言,敏感度为接收器回传最小 C/N 比值的最低功率强度。在接下来的讨论中,则可发现接收器的敏感度甚为依赖 RF 前端的噪声指数 (Noise figure。就数学表达式来看,我们可根据下列等式发现敏感度与接收器噪声指数之间的关联性:

等式 9. 敏感度为 C/N 与噪声指数所构成的函式。
在等式 9 中,敏感度可表达为 C/N 比值与噪声指数的函式。举例来说,定位追踪所需的最低 C/N 为 32 dB-Hz,则噪声指数为 2 dB 的接收器将具有 -140 dBm (-174 + 32 + 2) 的敏感度。然而,当单独测试基频 (Baseband) 收发器时,往往忽略了第一组 LNA。一般接收器为下图所示:

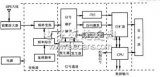
图10. GPS 接收器往往串联多组 LNA [6]
如图 10所示,一般 GPS 接收器均是串联了多组 LNA,为 GPS 讯号提供高效率的增益。如先前所说,第一组 LNA 将决定整组系统的噪声指数。图 10中,我们先假设 LNA1 具有30 dB 的增益与 1.5 dB 的 NF。此外,我们假设整个 RF 前端具有 40 dB 的增益与 5 dB 的 NF。接着请注意,由于 LNA2 之后的噪声功率将超过 -174 dBm/Hz 的热噪声(Thermal noise),因此带通 (Bandpass) 滤波器将同时减弱讯号与噪声。如此将几乎不会对 SNR 造成任何影响。最后,我们假设 GPS 芯片组可产生 40 dB 的增益与 5 dB 的噪声指数。即可计算出整组系统的噪声指数为:

表5. 线性与对数模式的增益与 NF
根据上列计算,即可找出接收器的整体噪声因子:


等式 10 与 11. 第一组 LNA 的噪声系数将影响接收器的噪声系数
透过等式 10 与 11 来看,若 GPS 接收器连接已启动的天线,则其噪声指数约可达 1.5 dB。请注意,我们已经先忽略了相关噪声指数等式中的第三项条件。由于此数值极小,基本上可将之忽略。
在某些案例中,GPS 接收器的作业天线会搭配使用内建 LNA。因此测试点将忽略接收器的第一组 LNA。如此一来将透过第二组 LNA 得出噪声指数,且其往往又大于第一组 LNA的噪声指数。若将 LNA1 移除,则可透过下列等式得出 LNA2 的噪声指数。


等式 12 与 13. 移除第一组 LNA 所得到的接收器噪声指数
如等式 12 与 13 所示,若将具备最佳噪声指数的 LNA 移除,则将大幅影响整组接收器的噪声指数。请注意,虽然此「常见」GPS 接收器噪声指数的计算范例纯为理论叙述,但仍具有其重要性。由于接收器所呈现的 C/N 比值,实在与系统的噪声系数密不可分,因此系统的噪声系数可协助我们设定合适的 C/N 测试限制。












 工商网监
工商网监
评论