 电子发烧友App
电子发烧友App


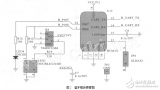
单一卫星敏感度量测
在了解敏感度量测的基本理论之后,接着将进行实际量测的各个程序。一般测试系统均是透过直接联机,将模拟的 L1 单一卫星载波送入至 DUT 的 RF 通讯端口中。为了获得C/N 比值,我们将接收器设定透过 NMEA-183 协议进行通讯。在 LabVIEW 中,则仅需串联 3 笔 GSV 指令,即可读取最大的卫星 C/N 值。
根据 GPS 规格说明,单一 L1 卫星若位于地球表面,则其功率应不低于 -130 dBm [7]。然而,消费者对室内与户外的 GPS 接收器使用需求,已进一步压低了测试限制。事实上,多款 GPS 接收器可达最低 -142 dBm 定位追踪敏感度,与最低 -160 dBm 讯号追踪。在一般作业点 (Operating point) 时,大多数的 GPS 接收器均可迅速持续锁定低于6dB 的讯号,因此我们的测试激发则使用 -136dBm 的平均 RF 功率强度。
若要达到最佳的功率精确度与噪声水平 (Noise floor) 效能,则建议针对 RF 向量讯号产生器的输出,使用外接衰减。在大多数的案例中,40 dB ~ 60 dB 的外接衰减,可让我们更接近线性范围 (功率 ≥ -80 dBm),妥善操作产生器。由于各组接收器的定位衰减 (Fix attenuation) 均不甚固定,因此必须先行校准系统,以决定测试激发的正确功率。
在校准程序中,我们可考虑:1) 讯号的峰值平均比 (Peak-to-average ratio)、衰减器各个部分的差异,还有任何接线作业可能的插入损耗 (Insertion loss)。为了校准系统,应先从 DUT 切断联机,再将该联机接至 RF 向量讯号分析器 (如 PXI-5661)。
Part A:单一卫星校准
当执行敏感度量测时,RF 功率强度的精确性,实为讯号产生器最重要的特性之一。由于接收器可获得 0 数字精确度的 C/N 值 (如 34 dB-Hz),因此生产测试中的敏感度量测可达 ± 0.5 dB 的功率精确度。因此,必须确保我们的仪控功能至少要达到相等或以上的效能。由于一般 RF 仪控作业是专为大范围功率强度、频率范围,与温度条件所设计,因此在执行基本系统校准时,量测的可重复性 (Repeatability) 应远高于特定仪器效能。下列章节将进一步说明可确保 RF 功率精确度的 2 种方法。
方法 1:单一被动式 RF 衰减器:
虽然使用外接衰减,是为了确保 GPS 讯号产生作业可达最佳噪声密度,但实际仅需 20 dB 的衰减,即可确保噪声密度低于 -174 dBm/Hz。当使用 20 dB 的固定板 (Pad) 时,仅需将仪器设定为超过 20 dB 的 RF 功率强度即可。为了达到 -136 dBm 的目标,仪器应程序设计为 -115 dBm (假设 1 dB 的连接线插入损耗),且将 20 dB 衰减器直接连至产生器的输出。则所达到的 RF 功率将为 -136 dBm,但仍具有额外的不确定性。假设 20 dB 的固定板具有 ± 0.25 dB 的不确定性,且 RF 产生器亦于 -116 dBm 具有 ± 1.0 dB 的不确定性,则整体的不确定性将为 ± 1.25 dB。因此,虽然方法 1 最为简单且不需进行校准,但由于系统中的多项组件均未经过校准,因此可能接着发生不确定性。请注意,造成仪器不确定性最主要的原因之一,即为电压驻波比 (Voltage standing wave ratio,VSWR)。因为被动式衰减器是直接连至仪器的输出,所以反射回仪器的驻波即为实际衰减。由于降低了功率的不确定性,因此可提升整体功率的精确性。
请注意,此处亦使用高效能 VNA 确实量测被动衰减器。透过此量测装置,即可于 ± 0.1 dB 的不确定性之内,决定所要套用的衰减。
方法 2:经过校准的多组被动衰减器
校准 RF 功率的第二种方法,即是使用高精确度的 RF 功率计 (高于 ± 0.2 dB 的精确度,并最低可达 -70 dBm) 搭配多款固定式衰减器。因为我们是以固定频率,与相对较小的功率范围操作 RF 产生器,所以可有效修正由产生器造成的任何错误。此外,由于被动衰减器是以固定频率进行线性动作,因此亦可校准其不确定性。在方法 2 中,主要即必须确保产生系统可达到最佳效能,且将不确定性降至最低。此高精确度功率计可达优于 80 dB 的动态范围 (往往为双头式仪器),进而确保最低的量测不确定性。
透过高精确度的功率计,即可使用 3 种量测作业进行系统校准:1 种用于向量讯号产生器的 RF 功率,另外 2 种量测作业可校准衰减器。为了达到最佳的不确定性,则应设定系统所需的最少量测次数。若要达到 -136 dBm 的 RF 功率强度,则可将 RF 仪器程序设计为 -65 dBm 的功率强度,并使用 70 dB 固定衰减 (假设 1 dB 插入损耗)。为了确实进行 RF 功率强度的程序设计作业,则可透过固定的 Padding 校准实际衰减。校准程序如下:
1) 将 VSG 程序设计为+15 dBm 功率强度
可开启 Measurement and Automation Explorer (MAX) 并使用测试面板。透过测试面板以 +15 dBm 产生 1.58 GHz 连续波 (CW) 讯号。
2) 以高精确度的功率计量测 RF 功率
使用 RF 功率计,让功率达到仪器功率精确度规格的 +14.78 dBm (或近似值) 之内。
3) 附加 70 dB 固定式衰减器(30 dB + 20 dB + 20 dB) 与任何必要的连接线
4) 以高精确度的功率计量测 RF 功率
将功率计设定为最大平均值 (512),以量测 RF 功率强度。此处的读数为 -56.63 dBm。
5) 计算 RF 总耗损
若以 +14.78 dBm 减去 -56.63 dBm,即可在整合了衰减器与连接线之后,确保产生 71.41 dB 的功率耗损。请注意,多款衰减器往往具备最高 ± 1.0 dB 的不确定性。因此量测所得的衰减可能最高达 ± 3.0 dB 的变化。所以校准衰减器更显重要,确保已知衰减可达较低的不确定性。
根据衰减器与连接线的校准例程,即可确定所需的 RF 功率强度必须达到 -136 dBM。基于前述的 71.41 dB 衰减,必须将 RF 向量讯号产生器设定为 -58.59 dBm 的功率强度。若要确认程序设计过后的功率无误,则可依下列步骤进行:
6) 直接将功率计附加至 RF 向量讯号产生器
并移除所有的衰减器与连接线。
7) 将 RF 产生器设定必要数值,使其最后功率达到-136 dBm。
而程序设计的数值应为 -58.59 dBm,即由 -136 dBm + 71.41 dB 而得。
8) 以功率计量测最后功率。
请注意,所测得的 RF 功率,将因仪器的功率精确度而有所不同。即使测得 -58.59,则实际结果亦将因仪器的不确定性而产生些许变化。
9) 调整产生器功率直到功率计读出-58.59 dBm
虽然 RF 产生器可于一定的容错范围内进行作业,但此数值不仅具有可重复性,亦可调整 RF 功率计进行校准,直到得出合适的数值为止。
透过上述方法,仅需 3 项 RF 功率量测作业,即可决定所需的 RF 功率。因此,假设量测装置具有 ± 0.2 dB 的不确定性,则可得出 – 136 dBm 的功率不确定性将为 ± 0.6 dBm (3 x 0.2)。
Part B:敏感度量测
现在校准 RF 量测系统的功率之后,接着仅需进行 RF 产生器的程序设计,将功率强度设定足以让接收器回传最小的 C/N。虽然用于量测敏感度的 RF 功率将因接收器而有所不同,但是接收器 C/N 与 RF 功率的比值,将呈现完美的线性关系。在我们的测试中,可假设所需的 C/N 为 28 dB-Hz 以进行定位。透过等式 12,即可得出接收器 C/N 比值与噪声指数之间的关系。

等式 14. C/N 做为噪声指数与卫星功率的函式
假设卫星功率稳定,则可发现由接收器回报的 C/N 比,几乎就等于接收器的噪声指数函式。下表显示可达到的多样 C/N 比值。

表6. C/N 为噪声指数的函式
一般来说,接收器上的 GPS 译码芯片组,将得出定位作业所需的最小 C/N 比值。然而,又必须透过整组接收器的噪声指数,才能决定目前功率强度所能达到的 C/N 比值。因此,当量测敏感度时,必须先了解定位作业所需的最小 C/N 比值。
其实有多种方法可量测敏感度。如上表所示,RF 功率与敏感度具有直接相关性。因此,可根据现有的敏感度功率强度,量测接收器的 C/N 比值;亦可根据不同的 RF 功率强度,得出系统敏感度。
为了说明这点,则可注意 RF 讯号功率与 GPS 接收器 C/N 比值,在不同功率强度之下的关系。下方量测作业所套用的激发,即忽略了第一组 LNA 而进行,且接收器的整体噪声指数约为 8 dB。而表7 显示相关结果。
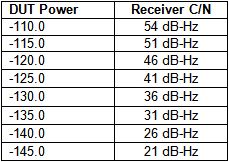
表7. 接收器的 C/N 比值为 RF 功率的函式
如表7 所示,此量测范例的 RF 功率与 C/N 比值,几乎是呈现完整的线性关系。而若使用高输入功率模拟 C/N 比值,将产生例外情况;接收器报表将出现可能的最大 C/N 值。然而,因为在任何条件下,进行实验的芯片组均不会产生超过 54 dB-Hz 的 C/N 值,所以这些结果均属预期范围之中。
根据表6中所示 RF 功率与敏感度之间的线性关系,其实仅需针对接收器模拟不同的功率强度,即可进行 GPS 接收器的生产测试作业。若接收器在 -142 dBm 得出 28 dB-Hz 的C/N 值,则亦可于 -136 dBm 得到 34 dB-Hz 的 C/N 值。若特别注重量测速度,则可使用较高的 C/N 值,再从结果中推断出敏感度的信息。
找出噪声指数
又根据等式 13 与 14,搭配相关载噪比 (Carrier-to-noise ratio),则可得出接收器或芯片组的噪声指数。亦如下方等式 15 所示。

等式 15. 接收器噪声指数为功率与 C/N 比值所构成的函式。
而由表7 所示,接收器的噪声指数将直接与 RF 功率强度与载噪比互成比例。根据此关系,我们仅需针对 RF 功率强度与 C/N 进行关联性,即可量测芯片组的噪声指数。而此项量测中请注意,应以 0.1 dB 为单位增加产生器的功率。由于 NMEA-183 协议所得到的卫星 C/N 值,是以最接近的小数字为准,因此在量测接收器 C/N 比值时,应估算噪声指数达 1 位数的精确度。范例结果如图 18 所示。
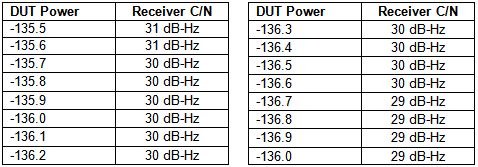
表8. DUT 功率与接收器 C/N 的关联。
如表8 所示,若 RF 功率强度处于 -136.6 dBm ~ -135.7 dBm 之间,则其 C/N 比值将维持于 30 dB-Hz。若以舍入法计算 NMEA-183 的数据时,则几乎可确定 -136.1 dBm 功率强度将产生 30.0 dB-Hz 的 C/N 比值无误。透过等式 14,芯片组的噪声指数则为 -174.0 dBm + -136.1 dBm + 30.0 dB-Hz = 7.9 dB。请注意,此计算是根据 2 组不确定性系数而进行:向量讯号产生器的功率不确定性,还有接收器所产生的 C/N 不确定性。
多组卫星的 GPS 接收器量测
敏感度量测需要单一卫星激发,而有多项接收器量测需要可仿真多组卫星的单一测试激发。更进一步来说,如首次定位时间 (TTFF)、定位精确度,与精确度降低 (Dilution of precision) 的量测作业,均需要接收器进行定位。由于接收器需要至少 4 组卫星进行 3D 定位作业,因此这些量测将较敏感度量测来得耗时。也因此,多项定位量测作业均于检验与校准作业中进行,而非生产测试时才执行。
此章节将说明可为接收器提供多组卫星讯号的方法。在讨论 GPS 仿真作业时,亦将让使用者了解 TTFF 与定位精确度量测的执行方法。若是讨论 RF 记录与播放作业,将一并说明应如何在多项环境条件下,校准接收器的效能。
量测首次定位时间 (TTFF) 与定位精确度
首次定位时间 (TTFF) 与定位精确度量测,为设计 GPS 接收器的首要检验作业。若您已将多种消费性的 GPS 应用了然于胸,即应知道接收器回传其实际位置所需的时间,将大幅影响接收器的用途。此外,接收器回报其位置的精确度亦甚为重要。
为了让接收器可进行定位,则应透过导航讯息 (Navigation message) 下载星历与年历信息。由于接收器下载完整 GPS 框架必须耗费 30 秒,因此「冷启动 (Cold start)」的TTFF 状态则需要 30 ~ 60 秒。事实上,多款接收器可指定数种 TTFF 状态。最常见的为:
冷启动 (Cold Start):接收器必须下载年历与星历信息,才能进行定位。由于必须从各组卫星下载至少 1 组 GPS 框架 (Frame),因此大多数的接收器在冷启动状态下,将于30 ~ 60 秒时进行定位。
热启动 (Warm Start):接收器的年历信息尚未超过 1 个星期,且不需要其他星历信息。一般来说,此接收器可于 20 秒内得知目前时间,并可进行 100 公里内的定位 [2]。大多数热启动状态的 GPS 接收器,可于 60 秒内进行定位,有时甚至仅需更短的时间。
热开机 (Hot Start):接收器具备最新的年历与星历信息时,即为热开机状态。接收器仅需取得各组卫星的时序信息,即可开始回传定位位置。大多数热开机状态的 GPS 接收器,仅需 0.5 ~ 20 秒即可开始定位作业。
在大部分的情况下,TTFF 与定位精确度均与特定功率强度相关。值得注意的是,若能于多种情况下检验此 2 种规格的精确度,其实极具有其信息价值。因为 GPS 卫星每 12个小时即绕行地球 1 圈,所以可用范围内的卫星讯号随时都在变化,也让接收器可在不同的状态下回传正确结果。
下列章节将说明应如何使用 2 笔数据源,以执行 TTFF 与定位精确度的量测,包含:
1) 接收器在其布署环境中,透过天线所获得的实时数据
2) 透过空中传递所记录的 RF 讯号,并将之用以测试接收器所记录的数据
3) 当记录实时数据后,RF 产生器用于模拟星期时间 (Time-of-week,TOW) 所得的仿真数据用此 3 笔不同的数据源测试接收器,可让各个数据源的量测作业均具备可重复特性,且均相互具备相关性。
量测设定
若要获得最佳结果,则所选择的记录位置,应让卫星不致受到周遭建筑物的阻碍。我们选择 6 层楼停车场的顶楼进行测试,以无建物覆盖的屋顶尽可能接触多组卫星讯号。透过GPS 芯片组的多个开机模式,均可执行 TTFF 量测作业。以 SIRFstarIII 芯片组为例,即可重设接收器的出厂、冷启动、热启动,与热开机模式。下方所示即为接收器执行相关测试的结果。
若要量测水平定位的精确度,则必须根据经、纬度信息进而了解相关错误。由于这些指数均以「度」表示,因此可透过下列等式转换之:

等式 16. 计算 GPS 的定位错误
请注意该等式中的 111,325 公尺 (111.325 公里),即等于地球圆周的 1 度 (共 360 度)。此指数是根据地球圆周 360 x 111.325 km = 40.077 km 而来。
Off-the-Air GPS
请注意该等式中的 111,325 公尺 (111.325 公里),即等于地球圆周的 1 度 (共 360 度)。此指数是根据地球圆周 360 x 111.325 km = 40.077 km 而来。

表9.「Off-the-air」GPS 讯号的 TTFF 与最大 C/N 比值
根据初始的 「Off-the-air」结果,则可发现 GPS 接收器在标准的 3 秒误差内,可达到 33.2 秒的 TTFF。这些量测结果均位于 TTFF 规格的容错范围内。而更重要的,即是可透过仿真与记录的 GPS 数据,进而比较量测结果与实际结果。
根据上列线性误差等式,即可计算各次量测的线性标准误差
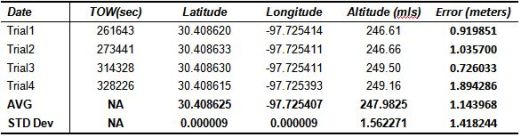
表10. 由「Off-the-air」GPS 讯号所得的 LLA
请注意,若要将「Off-the-air」GPS 讯号、仿真讯号,与播放讯号进行相关,则必须先进行「Off-the-air」讯号功率的相关性。当进行 TTFF 与定位精确度量测时,RF 功率强度基本上不太会影响到结果。因此,必须比对「Off-the-air」、仿真,与记录 GPS 讯号的 C/N 比值,即可进行 RF 功率的相关性作业。
已记录的 GPS 讯号
虽然可透过实时讯号量测 TTFF 与定位误差,但是这些量测作业往往不可重复;如同卫星均持续环绕地球运行,而非固定不动。进行可重复 TTFF 与定位精确度的量测方式之一,即是使用已记录的 GPS 讯号。此章节将接着说明应如何透过已记录的 GPS 讯号,以进行实时 GPS 讯号的相关作业。
已记录的 GPS 讯号,可透过 RF 向量讯号产生器再次产生。由于必须播放讯号,则校准 RF 功率强度最简单的方法,即是比对实时与记录的 C/N 值。当获得「Off-the-air」讯号时,则可发现所有实时讯号的 C/N 峰值均约为 47 ~ 49 dB-Hz 之间。
而播放讯号的功率强度,亦可达到与实时讯号相同的 C/N 值,进而确定其所得的 TTFF 与位置精确度,将可与实时讯号产生相关。在下图 21 中,我们使用的星期时间 (TOW)值与实时「Off-the-air」讯号的 TOW 相近,而在 4 次不同的实验下得到 TTFF 结果。
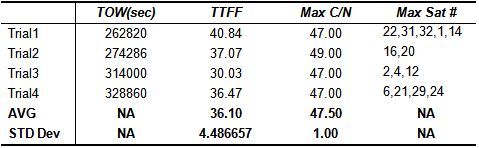
表11. 由「Off-the-air」GPS 讯号所得的 TTFF
除了量测首次定位时间之外,亦可量测 GPS 接收器所取得的经度、纬度,与高度信息。下图显示相关结果。

表12. 由「Off-the-air」GPS 讯号所得的 LLA
从表11与12 中可注意到,其实透过已记录的 GPS 讯号,即可得到合理的可重复 TTFF 与 LLA (Latitude、Longitude、Altitude) 结果。然而,由于这些量测作业的错误与标准误差,仅稍微高于「Off-the-air」量测的误差,因此几乎可将之忽略。因为绝对精确度 (Absolute accuracy) 较高,所以可重复性亦较优于「Off-the-air」量测作业。












 工商网监
工商网监
评论