这个导航很复杂因为它并不只是躲避障碍物,这只是简单的部分,机器人还需要去找到一个适合的地方演奏:一个独立的目标或一个幕墙。然后机器人需要靠在墙上树立一个好角度,或者直接在物体前面。同时伴随有头部的左右上转动。但它能够很好的实现它。当我放任它自行寻找时,我通常会对它找到演奏的东西感到疯狂。
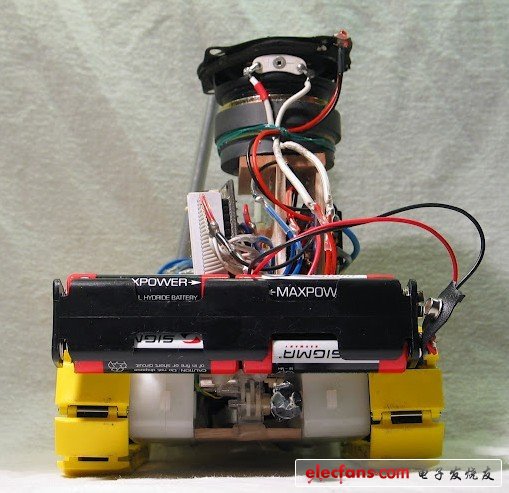
机器人运行只需要四个电池。一定是因为传送带是齿轮的,因此在电机上没任何拉力,同时也没有舵机。其实我也不是很清楚,我只是知道它能运行几个小时。
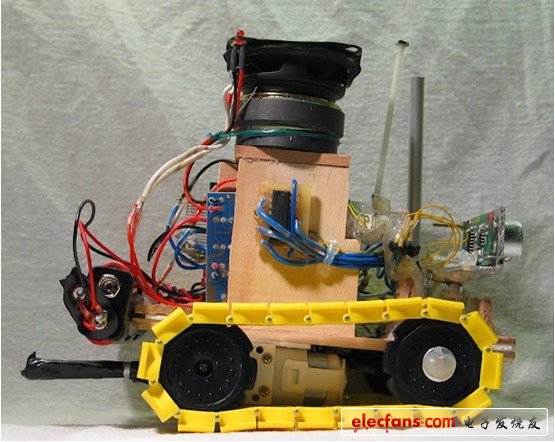
图片中间的是L293D电机驱动器。它只是用来使头部能够转动。
你可以看到用胶来固定的简便性。涂上胶,粘上去就可以了。线很摇晃?把他们黏在木板上就OK了。
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...