



【简述】

-增量编码器
支持A/B/Z信号
分辨率2000-20000P/R
中空尺寸18.5-23mm
-绝对值编码器
单圈或多圈(需加电池)
单圈13-18位 多圈16位
BISS/多摩川接口
中空12-18.5mm
【主要特性】
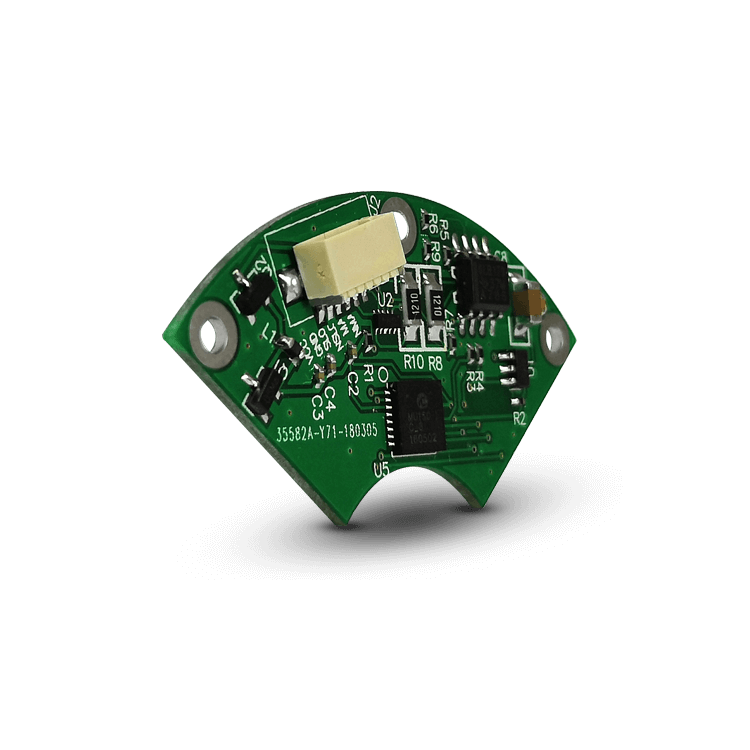
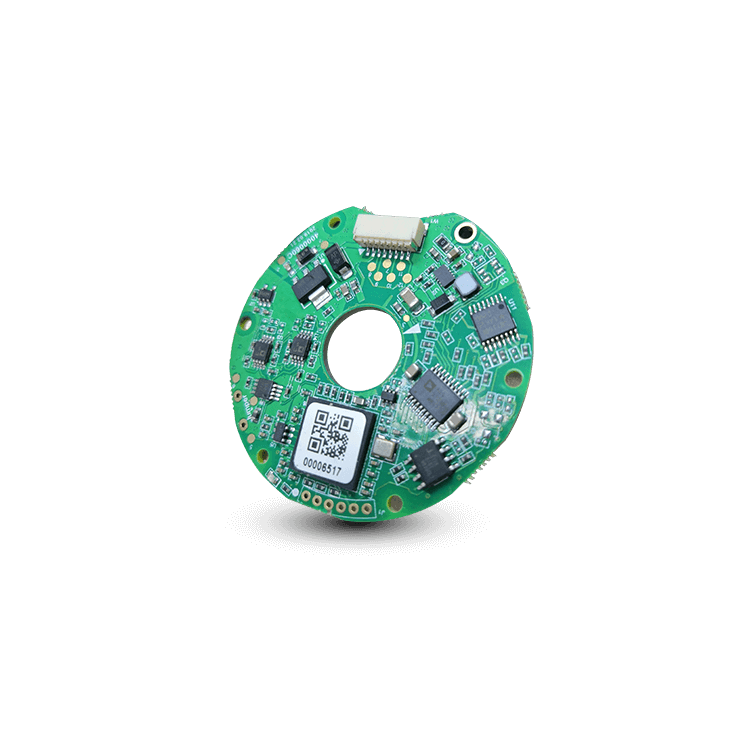
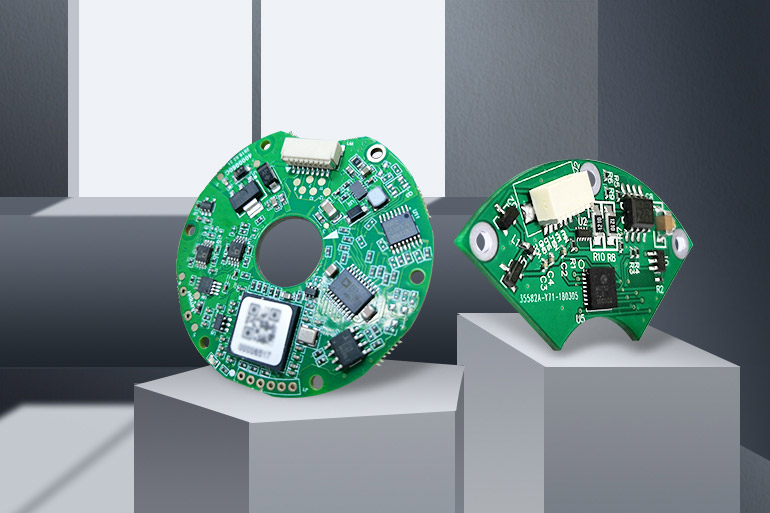
中空式编码器
无轴承,有利于管、线在电机空心轴里排布
高精度绝对值
高精度,高分辨率,高可靠性
低要求
安装难度和使用要求降低,快速安装,免调试,插线即用
结构紧凑,体积小
省去轴承,厚度大幅度减小,可集成到有限空间的应用中
支持多种接口及协议
标准BiSS协议,兼容多摩川、松下的RS485串行通信,SPI接口,SSI、PWM
【规格参数】
| 精度 | ||
| 单圈分辨率(最大) | Bits | 17(20) |
| 精确度 | 度 | ±0.015 |
| 重复精度 | 度 | ±0.003 |
| 机械安装 | ||
| 外径 | mm | 60 |
| 轴直径 | mm | 12 |
| 总厚度 | mm | 8.3 |
| 静盘动盘间气隙 | mm | 0.6 |
| 轴向允许误差 | mm | ±0.1 |
| 径向允许误差 | mm | ±0.1 |
| 电气特性 | ||
| 供电电压 | V | 4.5-26.4 |
| 电流 | mA | 140 |
| 通信协议 | BISS-C/SSI/RS485/SPI | |
| 最高转速 | RPM | 9000 |
| 温/湿度 | ||
| 工作温度 | ℃ | -40~85 |
| 存储温度 | ℃ | -40~125 |
| 湿度 | % | 0.98 |
| 环境测试 | ||
| IP等级 | -- | IP20 |
| EMC | -- | EC 6100-6-2 EC 6100-6-4 |
| 振动 | -- | EC 60068-2-6 |
| 冲击 | -- | EC 60068-2-27 |



















