RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性。
【主要特性】

采用传统抱闸
提高了机器人在工作环境中的制动性能
绝对值编码器
保障机器人定位更精准、运行轨迹的稳定性更好
常规供电
常规为48VDC供电,24~60VDC之间供电可选
小巧轻便
减速器采用中空超扁平设计,结构更紧凑,整机更小巧,关节自重更轻
可选通信
EtherCAT,CANopen通信可选,支持大部分主流机器人控制器
【规格参数】
| 参数类型 | 单位 | RJSII-14S | RJSII-14 | RJSII-17 | RJSII-25 | RJSII-32 | RJSII-40 |
| 基本性能 | |||||||
| 启停容许 | Nm | 26 | 34 | 66 | 207 | 459 | 800 |
| 平均负载转矩 | Nm | 10.5 | 13.5 | 49 | 133 | 267 | 557 |
| 静态负载转矩 | Nm | 21.2 | 23.7 | 51 | 119 | 450.8 | 600 |
| 最大瞬时转矩 | Nm | 51 | 66 | 134 | 376 | 848 | 1458 |
| 最大许用弯矩 | Nm | 20 | 41 | 72 | 243 | 460 | 600 |
| 最大瞬时弯矩 | Nm | 40 | 80 | 140 | 480 | 900 | 1200 |
| 额定转速 | rpm | 29.7 | 29.7 | 30 | 24.8 | 12.4 | 16.5 |
| 最大转速 | rpm | 54.5 | 47.5 | 35 | 31.4 | 15.5 | 20 |
| 定位精度 | 度 | 0.015 | |||||
| 电气性能 | |||||||
| 额定功率 | W | 59 | 118 | 200 | 400 | 750 | 1050 |
| 额定电压 | VDC | 48 | 48 | 48 | 48 | 48 | 48 |
| 额定电流 | A | 2.7 | 4.7 | 6 | 11.5 | 20 | 33.7 |
| 峰值电流 | A | 6.75 | 11.75 | 15 | 28.75 | 50 | 84.25 |
| 通讯协议 | -- | EtherCAT/CANopen | |||||
| 机械性能 | |||||||
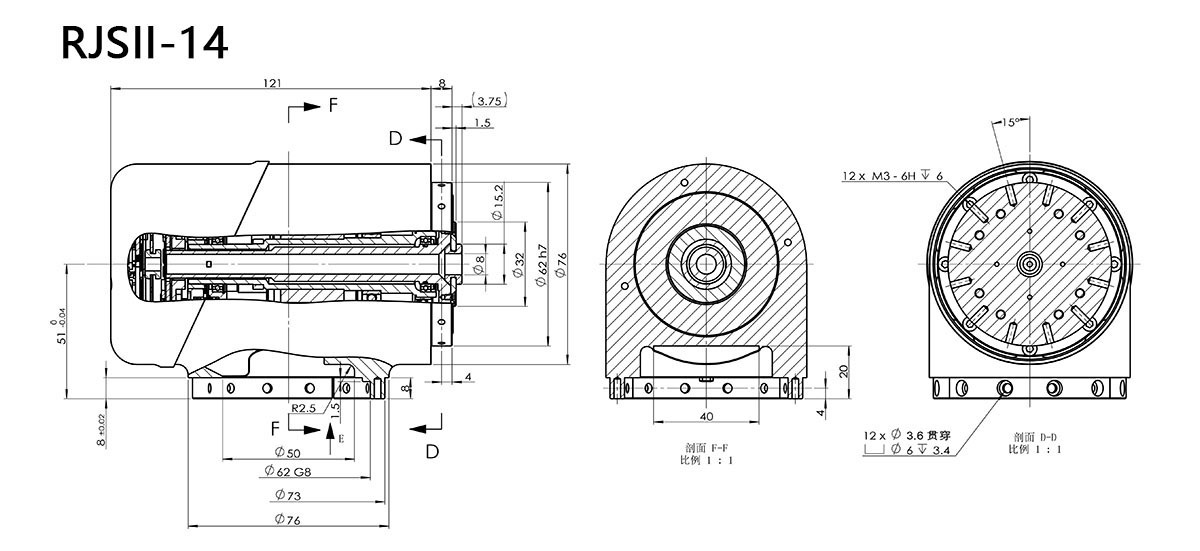
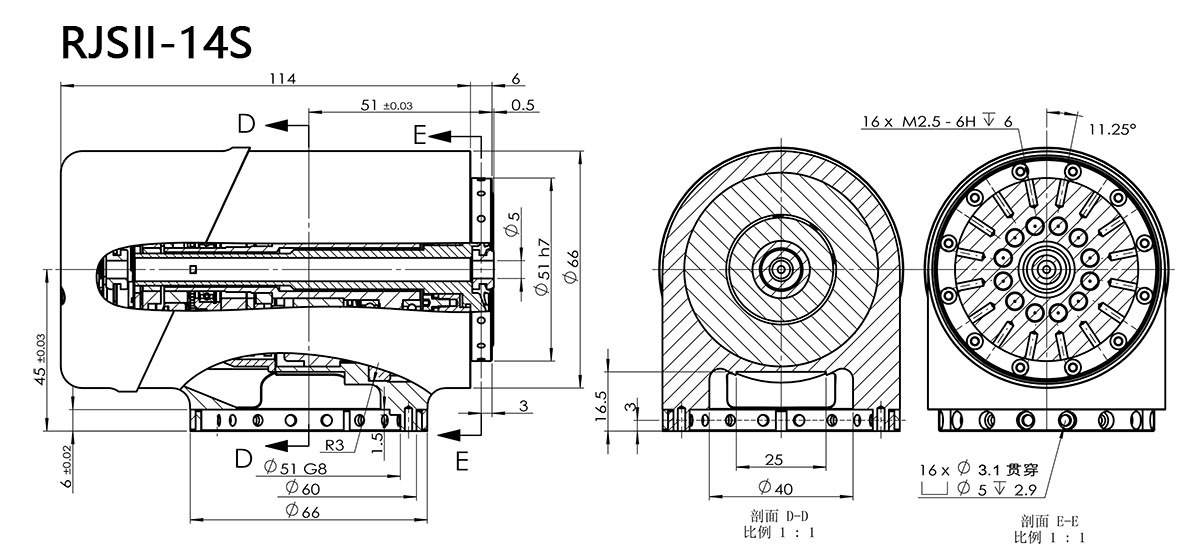
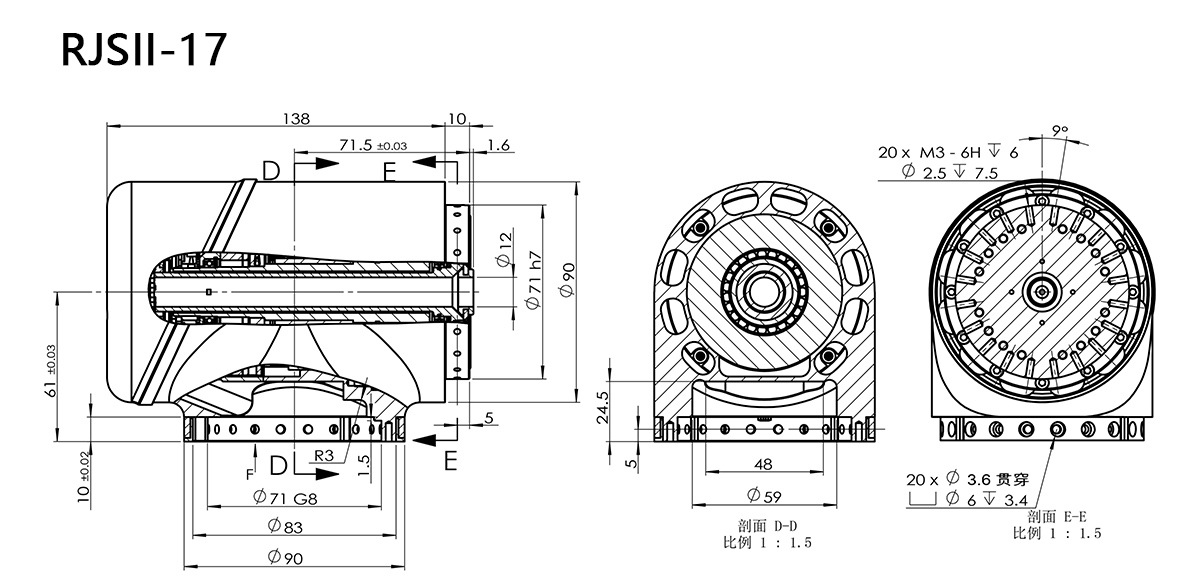
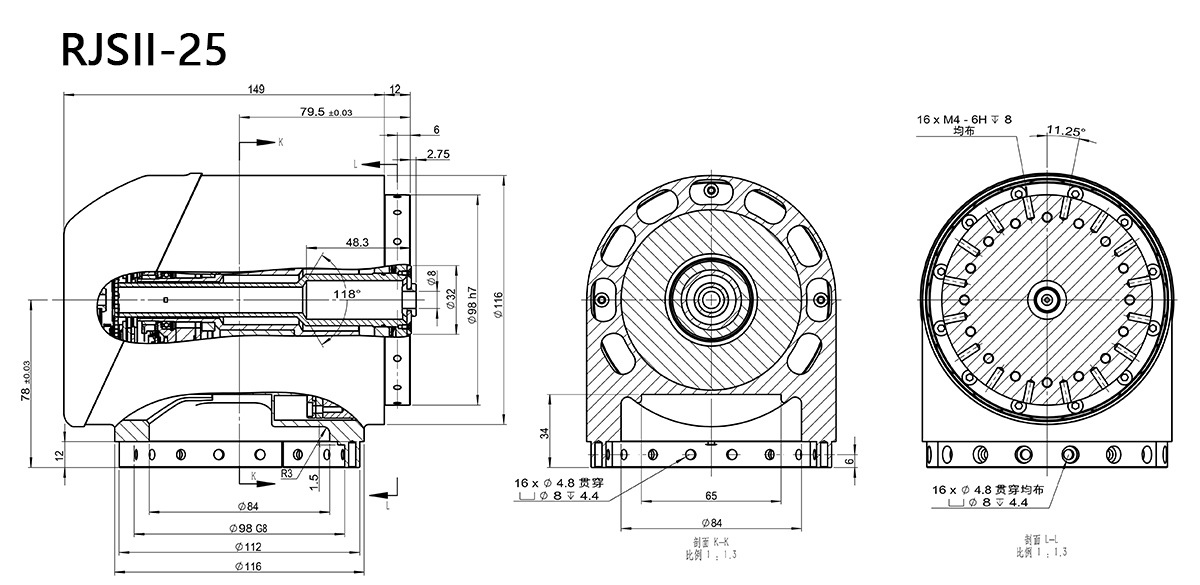
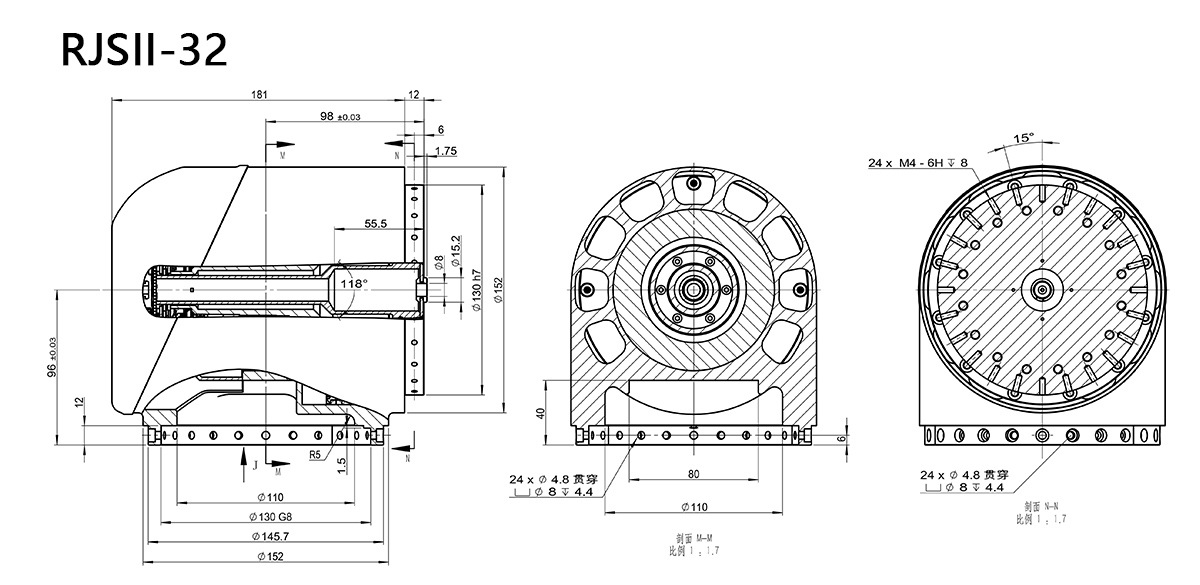
| 直径 | mm | 66 | 76 | 90 | 116 | 152 | 184 |
| 长度 | mm | 114 | 121 | 138 | 149 | 181 | 209 |
| 重量 | kg | 1.04 | 1.65 | 3.4 | 4.5 | 7.8 | 17 |
| 减速比 | -- | 100 | 101 | 101 | 121 | 161 | 121 |
| 增量编码器 | P/R | UVW霍尔+20000P/R增量编码器 | |||||
| 绝对值编码器 | Bit | 17位单圈绝对值 | |||||
| 抱闸 | -- | 24/12VDC电磁摩擦片式 | |||||
| 环境要求 | |||||||
| IP等级 | -- | IP64 | |||||
【机械尺寸外形图】