聚丰项目 > 轮足两用可变形环境感知探测机器人
本作品为一种轮式、足式两用环境探测感知机器人。该机器人具有轮式滚动、多足爬行两种形态,能够适应各种复杂地形的同时,具有较强的移动灵活性,可用于井矿、地穴、消防等危险领域的环境感知探测工作。
天星1979379768
天星1979379768
团队成员
赵东相 嵌入式软件工程师
作品难点在于:1、轮足可变形的机器人结构设计;2、机器人六足爬行形态的精确控制。
作品的创新点在于:1、采用ZMOD4410气体传感器,具有较高的气体环境感知检测精度和较强的稳定性,同时根据传感器ODOR模式的特性实现了气体浓度突变的自动报警功能,能够第一时间通知探测人员撤离危险区域;2、机器人能够变形,拥有轮式滚动和多足爬行两种运动形态,在满足移动速度的同时能够适应多种复杂地形,具有较强的应用前景。
最后,衷心感谢IDT技术支持在本次ZMOD4410气体传感器使用中给予的帮助。
机器人硬件系统由机器人控制器、ZMOD4410 HiCom模块、无线图传模块、电机驱动模块四个部分组成。其中,机器人控制器用于控制机器人的整体运动;ZMOD4410传感器用于测量气体环境参数,包括TVOC、IAQ、eCO2以及气体浓度是否发生突变等参数;无线图传模块用于远程传输机器人当前所处环境的图像信息,方便操作人员查看机器人当前所处的地形;电机驱动模块用于驱动机器人轮式形态启动的直流有刷电机,控制电机的转速和转向,进而控制机器人轮式滚动形态的前行速度和方向。
本次设计的机器人控制器由PMW模块、OLED模块、LED模块、蜂鸣器模块、蓝牙模块、SD模块、MCU模块共七个模块组成。其中,PWM模块用于控制多足爬行形态下启动的伺服电机的转角;OLED模块用于显示系统参数信息,方便系统的调试;LED模块、蜂鸣器模块用于提示系统当前所处的状态信息,方便操作人人员的操作;蓝牙通信模块配合安卓APP可完成机器人的短程无线遥控操作,同时能够以数据图表的方式统计气体传感器数据的变化趋势;SD卡模块用于存储MCU的运行日志问题,方便系统故障排查与解决;无线通信模块用于机器人的远程遥控操作。
MCU模块用于整个机器人系统的运动控制,通过IIC通信的方式读取ZMOD4410传感器的数据,配合IDT官方提供的算法库,能够准确读取TVOC、IAQ、eCO2气体浓度参数;MCU以PWM脉冲的方式驱动电机驱动模块,输出与电压线性相关的电压,从而控制直流有刷电机的转速与转向;远程无线遥控器通过2.4GHz频段发送操作人员的控制指令,机器人本地接收器将接收的控制信号以UART通信的方式传递至MCU,最终完成机器人控制指令的执行。系统电源模块用于整个机器人系统的供电。

图一 本次设计的机器人硬件原理框图

图二 本次设计的机器人控制器实物图片

图三 本次设计的机器人硬件系统连接实物图片
本次设计的轮足两用机器人系统软件代码均已上传至GitHub,具体网址下载链接为:https://github.com/liren197968/SweepRobot/tree/master/Stm32F4/KeilMdk5Project/SweepRobot。
系统上电后,MCU首先完成外设的初始化,其次开始初始化各个硬件模块,具体LED模块、蓝牙模块、气体传感器模块、蜂鸣器模块、PWM模块、直流电机初始化、运动形态的初始化。之后进入系统的循环主流程。
机器人系统首将先检测电池当前的电量,若电池电量较低,系统将停止运行,并通过蜂鸣器播放充电提示音;若电池电量充足,系统开始接收遥控器的控制信号。若系统收到气体测量控制指令,系统将开启ZMOD4410的气体检测功能,否则将停止气体检测功能。若系统收到形态切换指令,机器人将进行形态切换(系统默认的机器人形态为轮式滚动形态),否则系统将保持当前的运动形态。系统软件流程图如下图所示。

图四 系统软件流程图
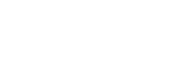
本文设计的机器人实物图片如图 5.1所示,机器人可变形,具有轮式滚动、多足爬行两种运动形态,可通过无线远程遥控器、手机APP进行遥控。机器人的轮式滚动形态为四轮滚动结构,通过后驱前转向的方式实现,具有前滚、后滚、转向等滚动功能;机器人多足爬行形态为六足爬行结构,能够完成前进、后退、逆时针转圈、顺时针转圈等功能;此外,机器人还具有无线图像传输功能。
本文设计的机器人通过IDT的ZMOD4410传感器测量气体浓度数据,测量结果如下图所示。当环境的气体浓度超标或气体浓度在极短的时间内发生浓度突变时,系统将发出报警信号,从而在第一时间内通知探测人员测量危险现场。
作品详细演示功能:

图五 ZMOD4410传感器测量结果

图六 机器人总体装配图

图七 机器人实物图片
"
(2.09 MB)下载
葬花佛: 您好,对您这边的项目很感兴趣,可以加微信聊聊吗?巩文洁,18222005391微信手机同号
回复
十八子可: 你好!请问需要舵机么,舵机原厂 15914127917 李柯
回复
广告合作
王婉珠
内容合作
黄晶晶
内容合作(海外)
张迎辉
关注我们的微信

供应链服务 PCB/IC/PCBA
江良华
投资合作
曾海银
社区合作
刘勇
下载发烧友APP

 工商网监
工商网监