 电子发烧友App
电子发烧友App


本文主要从几个方面来谈谈自动泊车的技术,第一部分是自动泊车的发展历史,第二部分是自动泊车的内部结构和一些厂家的方案。值得注意的是,在不同的 国家,落实不同场景自动化的意愿也不相同,唯一确定的是,大家都不爱停车,确切的说是不爱找车位和停车。这是整个汽车智能化和自动驾驶里面最迫切的需求, 也是一个比较容易切入的环节。

△图1 各个自动驾驶功能的民众接受度,自动泊车需求呼声很高
第一部分 自动泊车的发展历史
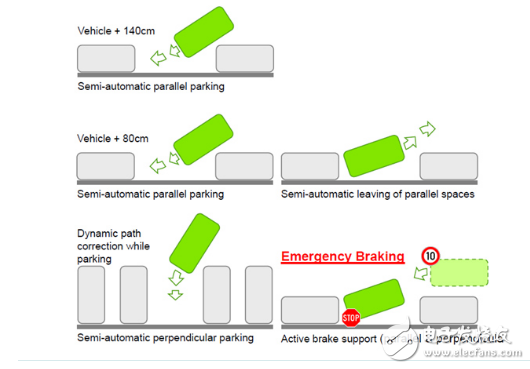
泊车辅助系统可以分三个大的阶段,分为被动式、半自主式泊车辅助、全自动泊车。
1)被动式:在泊车时提醒驾驶员前方或车辆后方障碍。在发展的过程中从只有后方预警,发展成车辆往前运动前方检测也有预警、加入视觉图像、加入辅助线还有周边盲区预警,到现在最复杂的是两种系统结合,包括倒车雷达+360度环视的两种功能。

△图2 被动式泊车系统结构
被动式主要利用超声波传感器+蜂鸣器+HMI图标来提示驾驶者外部障碍物情况,防止车辆在倒车时碰撞,一般由下面几个功能构成:
防碰撞声音+图像提示
测量停车位大小的系统
提供转弯角度的提示
提供后视图像和辅助线检测
360度环视图像
被动式是充分考虑了成本的系统,采用低成本的超声传感器来实现倒车时候的障碍物检测,一般距离为1米~1.5米的情况,消费者对此类系统接受度高。
2)半主动式泊车辅助
随 着自动化水平的提高,各个汽车公司都想要帮助驾驶者更好地停车,所以开发出来了不同的系统如Toyota Intelligent Park Assist、BMW Park Assistant、VW/AUDI Parking System Plus with Rear View Camera、Daimler Parktronic with Active Parking Assist和Ford Active Park Assist,这些系统的特点是一般需要驾驶员来负责油门和刹车,车辆帮忙计算轨迹路径,帮助驾驶员入库。
△图3 半自动泊车系统的一些对比
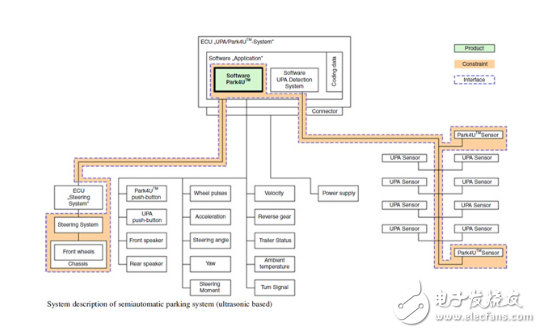
△图4 法雷奥Park 4U系统
如图4所示法雷奥的Park 4U,其系统构成为:
超声传感器
半自动泊车ECU 控制器
外部传感器:轮速、加速、转弯角度、转矩、车速、变速箱情况
HMI按纽和前后报警蜂鸣器
EPS控制转向系统
对 消费者来说,档位需要控制、加速和减速都需要控制,整个过程中的责任需要承担。各个车企,在HMI、车位大小上面有差异,基本的操作没有差异。J.D. Power 的《2015年驾驶员汽车交互体验报告》(2015 Driver Interactive Vehicle Experience (DrIVE) Report)显示,“最没用汽车新技术”榜单上半自动泊车排第三位,1/3车主都不会去尝试这个功能,因为并没有什么用。
3)全自动泊车
从半自动泊车到全自动泊车的进化过程中:
首要点:人是否需要在车内,仅通过手机可以指挥车进行泊车。
档位:在泊车过程中轨迹计算需要调整的时候,出现不成功的情况,系统是否有切换档位、实现前后进退的权限。
加速:系统有没有权限来自己进行加速。
刹车:系统是不是会检测到碰撞之后控制刹车系统。
可以看到这基本上是整个泊车把人的工作全部接盘过去的过程。
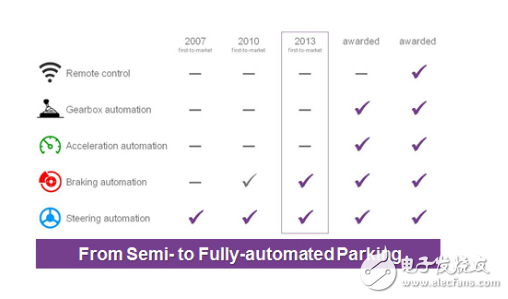
△图5 从半自动到全自动泊车
我们看到的就是比较酷的人在外面用手机进行操控:
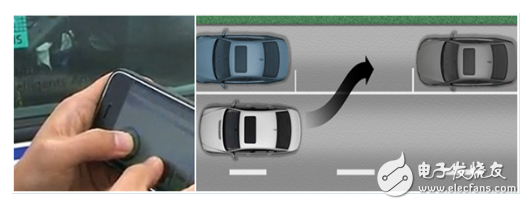
△图6 智能手机操控自动泊车
当然这一部分,人还是需要找到车位的。目前正在研究的所谓Valet Parking(停车场自动泊车),就完全是不需要你去找到那个车位的概念了。在某些充电运营的模式中,Valet Parking被赋予更多的意义:
1.停车位的自动搜索:车辆自动地寻找空车位,而且发现空车位。
2.电动车的无线充电:对电池进行无线充电。
3.充电完成之后的停车位分离:充电完成后,系统自动将充电槽释放给其它电动车辆,转而寻找普通停车位。
4.乘客召唤使用车辆:在限定运行的场景出口处,将车辆交还给所有人。
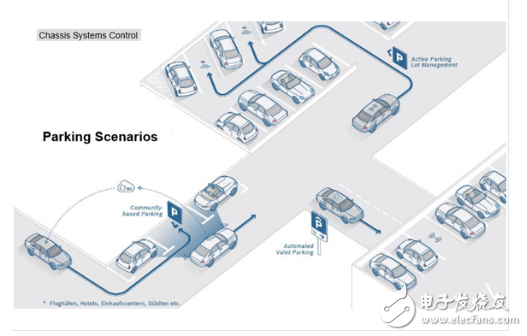
△图7 停车场自动泊车(V-Charge)
第二部分 停车场自动泊车的结构
其 实从被动辅助停车(L0)→半自动泊车(L1)→全自动泊车(L2)→停车场自动泊车(L3与L4之间),是一步步迭代和改进的过程。停车场自动泊车之所 以是L3和L4之间,主要是没人介入了,但需要在特殊场景里面,而且是低速行驶。我们把Valet Parking需要做的事情进行分解:
1.与停车场设施进行通信,获取地图和管理系统分配的可以泊车车位位置和编号信息。
2.进行定位和路径规划,自主决策来确定过去的路径。
2.1 执行低速无人驾驶前往待停车位
2.2 遇到障碍物的时候紧急制动(前后方都需要)
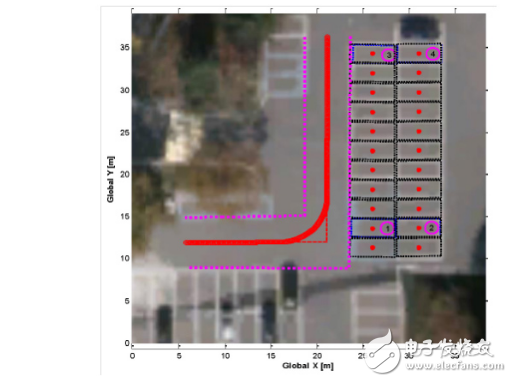
△图8 靠近车位路径规划
3.车库位置的自动入位
3.1 检测周边环境、车位的信息,制定入库策略
3.2 自动转弯进入
3.3 如果有紧急情况进行刹车
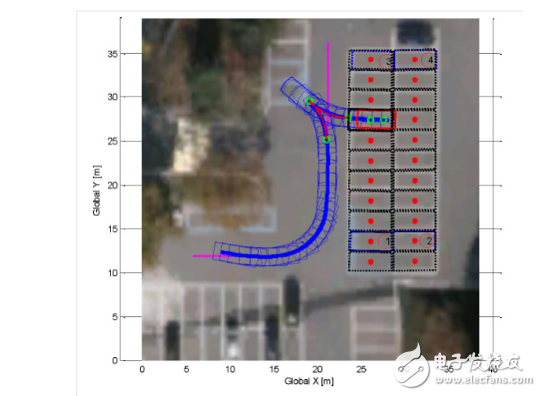
△图9 车辆入库轨迹计划
所以这个故事也比较简单,我们可以看到全球几乎所有的车企都在筹划这些方案,比较典型的如V-Charge大众方案、雷诺方案、本田方案。关于传感器、地图等配置以及具体技术路线有两个案例:
案例一——V-Charge方案
摄像头+超声波传感器被安排成360°覆盖周围环境。
12 个超声传感器负责短距离探测。
2个双目立体摄像头。
4个鱼眼摄像头,做360度环视。
连接到远程停车场服务器后,车辆定位会接收到专门设计的地图+停车场的道路网络信息。
本地地图存储了停车场的所有地方,使车辆可以根据摄像的信息来确定自身位置。
不依赖于GPS传感器,从而使导航也是在室内环境中,如地下停车位(GPS不可用时),并完善提供厘米级的精度。
这里配合无线充电,停车场的费用管理,加了不少别的东西进去。
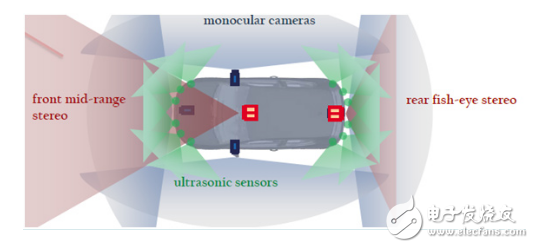
△图10 V-Charge方案
案例二——法雷奥方案
超声传感器:必须短距离测距,前后各6个,12个标配。
视觉传感器:一般用两个双目传感器(前后),视觉是主要解决车位的形状和定位问题的。
激光雷达用的是SCALA 的激光雷达,好处是可靠性更高一些。
这个更加纯粹一些,因为总体而言,它是按照方案来走的,而不是演示项目的概念。
车云小结
总的来说,未来停车场等基础设施智能化,特别是建立一个局部道路分配的计算云以后,会与路上所有的智能车辆之间通信交互和协同。自动泊车未来会涉及到诸多领域之间碰撞,使智能后台系统和运动终端开始博弈整个智能化的未来。

















 工商网监
工商网监
评论