电池负端可作为微控制器接地,这就让电压、温度和电流反馈可参考微控制器接地,并能进行单端ADC测量。对于电流反馈而言,正偏移电压需要引入,而反馈电压在电池充电时将为负。如图5所示,电阻R3和R4提供了所需的偏移电压。
充电算法:这一行为将结束环路。CPU读取ADC以获取电压、充电电流和温度读数,并根据充电曲线控制PWM占空比。CPU监控ADC结果与控制PWM的速度取决于环路响应时间和CPU带宽消耗二者之间如何平衡。
ADC参数和PWM分辨率:ADC分辨率和精确度以及PWM分辨率是在设计电池充电器时应考虑到的重要参数。ADC分辨率定义了输入电压测量的精度(这里是指反馈电压)。PWM分辨率则定义了改变输出信号占空比的精度,这进而又决定了电流控制电路的输出电压。锂离子电池充电时,电池电压需要实现准确和高精度的控制。当电池电压接近充满状态时,这一点就显得尤为重要。可控性取决于ADC分辨率、测量的准确度以及占空比变化的细粒度。
图5给出了采用赛普拉斯CY8C24x23 PSoC器件实施的充电器架构示例。微控制器与通用数字和模拟模块配合使用,可配置为特定的电路功能。举例来说,持续时间模拟模块可用来实施可编程增益放大器和比较器。开关电容模拟模块则有多种不同用途,包括滤波器、数模转换器(DAC)和模数转换器(ADC) 等。数字基础模块可用来实施PWM、计数器、定时器和缓冲器,而数字通讯模块则可用来实施SPI、UART、IrDA RX和TX等通信接口。此外,该器件还可提供I2C模块,可用作为主设备或从设备。
图6所示为单节电池充电器应用的器件资源消耗情况,我们看到还有足够的数字和模拟模块能够实施其它有用的功能,这就为系统提供了更多的集成选项,从而有助于降低系统成本和大小。
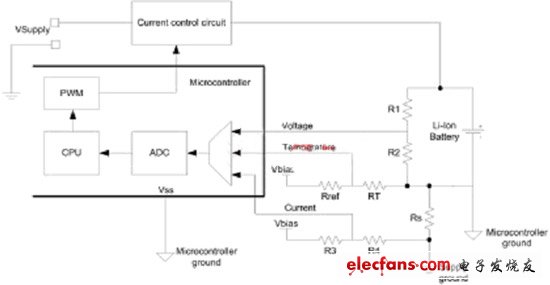
图6:采用PSoC 1 (CY8C24x23)的实施方案